一種線性/非線性自回歸模型及其在建模和預(yù)測中的應(yīng)用
2013-03-13 01:33:46馬家欣許飛云
東南大學(xué)學(xué)報(自然科學(xué)版) 2013年3期
馬家欣 許飛云 黃 仁
(東南大學(xué)機械工程學(xué)院,南京211189)
時間序列分析是現(xiàn)代系統(tǒng)辨識的重要方法之一,它在缺乏明確或者完全的系統(tǒng)輸入與輸出因果關(guān)系的情況下,將白噪聲看作系統(tǒng)輸入,從數(shù)理統(tǒng)計的角度揭示因果關(guān)系,最終求得系統(tǒng)的等價模型.該方法在各個領(lǐng)域都得到了廣泛的應(yīng)用[1-4].
ARMA 模型(包括AR 模型和MA 模型)是時序方法中最基本的時序模型,然而,它是在線性回歸模型的基礎(chǔ)上引申發(fā)展起來的,很難模擬工程實際中的非線性現(xiàn)象.而經(jīng)典的非線性時間序列模型,包括門限自回歸模型、雙線性模型、指數(shù)自回歸模型等,一般都是在特定的工程背景下提出的,通用性不夠.因此亟須提出一種適用于線性/非線性系統(tǒng)的時序模型.GNAR 模型的提出和應(yīng)用,在形式上統(tǒng)一了不同背景下提出的非線性時序模型的表達式,并有機結(jié)合了線性模型[5-7].另一方面,盡可能地利用更多的已知信息,獲取更多的系統(tǒng)特性,可進一步提高建模精度.因此,在經(jīng)典時序模型的基礎(chǔ)上,把影響系統(tǒng)輸出的已知相關(guān)數(shù)據(jù)作為系統(tǒng)輸入,可得到帶有外部輸入的時序模型,如ARX,ARMAX 等模型.這些模型不僅在理論上得到了驗證,在工程實際中也得到了廣泛應(yīng)用[8-11].本文針對系統(tǒng)輸入部分已知的特點,在GNAR 模型基礎(chǔ)上提出了GNARX 模型,給出了模型的參數(shù)估計和結(jié)構(gòu)選取方法,并將該模型應(yīng)用于仿真和實際數(shù)據(jù),效果優(yōu)于其他模型.
1 GNARX 模型表達式
GNAR 模型建模時,認為系統(tǒng)輸入是零均值的白噪聲.如果系統(tǒng)已知單個輸入,記作序列{ut},系統(tǒng)的輸出序列記作{wt},白噪聲記作{at},那么GNAR 模型就變形為單輸入的GNARX 模型.
對于單輸入系統(tǒng),設(shè)t 時刻輸出值為wt,表示為函數(shù)f 的表達式,即

式中,f(·)為任意一般線性/非線性函數(shù);wt-i為t-i 時刻的系統(tǒng)輸出觀測值,i =1,2,…;ut-τu-i為t-τu-i 時刻的系統(tǒng)輸入,i =1,2,…;at-i為t-i 時刻的白噪聲,i=1,2,…;τu為系統(tǒng)輸入ut的延遲.
對于一般線性平穩(wěn)系統(tǒng),式(1)中函數(shù)f 表示ARMAX 模型;而當(dāng)系統(tǒng)表現(xiàn)出非線性、非平穩(wěn)特征時,由Weierstrass 逼近原理[12]知,可用多項式逼近式(1)中的f 函數(shù):

式中,α1,α2,…,β1,β2,…,λ1,λ2,…是模型參數(shù).
假設(shè)式(2)描述的系統(tǒng)具有零初始狀態(tài)(即wt=0,t≤0),且系統(tǒng)在初始時刻之前沒有輸入(即ut=0,t≤0).實際建模中,模型階次p 取有限值,令xt,i表示式(2)中的各i 階項,xt,i,1(i=1,2,…,p)表示i 階項xt,i中的1 次項,即

則系統(tǒng)輸出wt可寫成如下形式:

式中,θ(i1),θ(i1,i2),…為模型參數(shù);xt,i,1(j)為向量xt,i,1中的第j 個元素;nw,j(j =1,2,…,p)為輸出{wt}各階項的記憶步長;nu,j(j =1,2,…,p)為輸入{ut}各階項的記憶步長.該模型簡記為GNARX(p;τu;nw,1,nw,2,…,nw,p;nu,1,nu,2,…,nu,p).
當(dāng)系統(tǒng)具有雙輸入{ut},{vt}時,把式(4)推廣至雙輸入的GNARX 模型,簡記為GNARX(p;
式中,nv,j(j =1,2,…,p)為輸入{vt}各階項的記憶步長;τv為系統(tǒng)輸入{vt}的延遲.
同理,式(6)可推廣到多輸入系統(tǒng),不再贅述.
2 GNARX 模型的參數(shù)估計與結(jié)構(gòu)選取
GNARX 模型的參數(shù)估計用最小二乘法很容易求得.以式(4)所示的單輸入GNARX 模型為例,在時刻t,p 階項記作xt,p,是一維向量形式.求取過程中用xt,p,i(i=1,2,…,p)表示p 階項xt,p中的i 次項,也是一維向量,其中xt,p,i(j)是標量,表示向量xt,p,i中的第j 個元素.

式中,mpi=Cinw,p+nw,p+nw,p+i-1(i=1,2,…,p).
令

記

于是,t 時刻到t+k 時刻的方程式寫成
θ 參數(shù)最小二乘法估計為

其中
根據(jù)式(9)即可對單輸入GNARX 模型進行參數(shù)估計.同理,可獲得雙輸入、多輸入模型的參數(shù)估計方法.
GNARX 模型結(jié)構(gòu)的辨識,包括模型階次p 的確定和記憶長度的確定,這直接影響著模型的建模性能和預(yù)測性能及模型的復(fù)雜程度,同時也關(guān)系到計算速度、預(yù)報實時性等問題.
對于GNARX 模型,定義單輸入模型i 階記憶步長si=nw,i+nu,i(i=1,2,…,p),雙輸入模型i 階記憶步長si=nw,i+nu,i+nv,i(i =1,2,…,p),多輸入模型i 階記憶步長可依此類推得到.則i 階參數(shù)量ri為

式中,i=1,2,…,p.

則GNARX 模型參數(shù)數(shù)量為修正AIC 準則函數(shù)[6]如下所示:

式中,α,β,γ 為重要度權(quán)系數(shù);σ2m為建模誤差方差;σ2f為預(yù)測誤差方差;N 為數(shù)據(jù)長度.
式(10)中,建模誤差σ2m的存在,保證了模型的建模能力;引入預(yù)測誤差σ2f,可以防止模型的過擬合;而模型參數(shù)數(shù)量R 的選取則考慮了模型復(fù)雜程度對AIC 值的影響,并影響最終模型選取.按信息準則,通常取AIC 值最小處對應(yīng)的模型為適用模型.
模型結(jié)構(gòu)的最終確定,需要綜合考慮模型的建模能力、預(yù)測能力和模型復(fù)雜程度等因素.在具體建模過程中,可根據(jù)現(xiàn)場要求的不同,調(diào)整式(10)中的重要度權(quán)系數(shù),來滿足實際建模需求.如模型用于濾波,則可增加建模重要度權(quán)系數(shù)α;若模型以預(yù)報為主,則可以增加預(yù)測重要度權(quán)系數(shù)β;而當(dāng)現(xiàn)場側(cè)重于建模實時性時,則可以增加模型復(fù)雜重要度權(quán)系數(shù)γ.
3 GNARX 模型的建模和預(yù)測應(yīng)用
GNARX 模型適用范圍廣,對線性和非線性數(shù)據(jù)有著良好的建模預(yù)測能力.下文用GNARX 模型對仿真數(shù)據(jù)和實際數(shù)據(jù)進行建模和預(yù)測,并與其他模型預(yù)測效果進行對比.
為比較建模預(yù)測效果,定義如下衡量指標:建模均方誤差

預(yù)測均方誤差

建模平均絕對百分比誤差

預(yù)測平均絕對百分比誤差

式中,yi為模型輸出真值;^為模型輸出估計值;Nm為用于建模的數(shù)據(jù)長度;Nf為用于預(yù)測的數(shù)據(jù)長度.
3.1 對仿真數(shù)據(jù)的建模和預(yù)測
仿真數(shù)據(jù)模型具體形式如下:
ARX 模型

ARMAX 模型

NLARX 模型

式中,at為白噪聲,服從正態(tài)分布N(0,0.1);ut-i(i=1,2,3,…)為系統(tǒng)輸入,服從平均分布U(0,1);xt-i(i=0,1,2,…)為系統(tǒng)輸出;F(·)取Matlab 中S 形網(wǎng)絡(luò)非線性估計函數(shù),單元數(shù)10,S 形函數(shù)表達式為f(z)=1/(1 +exp(-z)).
仿真數(shù)據(jù)選用前,先對{xt}序列進行歸一化處理,再舍去前50 個過渡區(qū)數(shù)據(jù),取中間250 個數(shù)據(jù)用于建模,后100 個數(shù)據(jù)用于預(yù)測.分別用AR 模型、GNAR 模型、ARX 模型、BP 網(wǎng)絡(luò)和GNARX 模型對上述各仿真數(shù)據(jù)進行建模預(yù)測.其中時序模型是在合適的模型結(jié)構(gòu)選取范圍內(nèi)選取的,并用式(10)所示修正AIC 判斷,重要度權(quán)系數(shù)嘗試選取α=1,β=1,γ=1,模型具體選取范圍見表1.

表1 針對不同數(shù)據(jù)建模時各模型結(jié)構(gòu)的選取范圍
1)僅以建模預(yù)測數(shù)據(jù)xt作為網(wǎng)絡(luò)的輸入,輸入樣本數(shù)據(jù)重合度記作r,輸入層節(jié)點數(shù)記作mi,網(wǎng)絡(luò)簡記為BP1(mi;mh;mo;r).
2)數(shù)據(jù)xt,ut同時作為網(wǎng)絡(luò)的輸入,xt輸入維數(shù)為mx,ut輸入維數(shù)為mu,延遲為τu,輸入數(shù)據(jù)xt的重合度記作r,此時輸入層節(jié)點數(shù)為mx+mu,網(wǎng)絡(luò)簡記為BP2(mx;mu,τu;mh;mo;r).
其中數(shù)據(jù)重合度針對輸入樣本{xt}而言,設(shè)第1 組輸入數(shù)據(jù)為{xt,xt-1,…,xt-mx},第2 組輸入數(shù)據(jù)為{xt-k,xt-k-1,…,xt-k-mx},把k 記作輸入樣本{xt}的平移量,則數(shù)據(jù)重合度定義為

網(wǎng)絡(luò)訓(xùn)練時,最大迭代次數(shù)設(shè)為1.0 ×104,目標誤差為1.0 ×10-3,在一定范圍內(nèi)改變網(wǎng)絡(luò)待定系數(shù)(如表中mi,mh和r 等),最終求取相對較優(yōu)的網(wǎng)絡(luò)模型.
針對上述3 組仿真數(shù)據(jù)的建模預(yù)測,各模型結(jié)構(gòu)選取結(jié)果見表2,表中還給出了各模型建模預(yù)測的各項誤差指標.通過對比建模預(yù)測效果可看出,GNARX 模型建模預(yù)測誤差最小,其預(yù)測效果見圖1~圖3.
3.2 對振動位移采樣電流數(shù)據(jù)的建模和預(yù)測
振動位移采樣電流數(shù)據(jù)取自文獻[4].用GNARX 模型對振動位移采樣電流數(shù)據(jù)(共150個)建模并預(yù)測時,首先對振動位移{x1t}和動態(tài)切削力{x2t}分別進行歸一化處理,然后對{x1t}取前120 個數(shù)據(jù)用于建模,后30 個數(shù)據(jù)用于預(yù)測.因為振動位移與動態(tài)切削力存在一定關(guān)系,那么對應(yīng)的采樣電流數(shù)據(jù)也必然存在某種聯(lián)系,所以本文用動態(tài)切削力采樣電流數(shù)據(jù){x2t}作為GNARX 模型的輸入.各模型選取范圍見表1,模型選取結(jié)果及建模預(yù)測誤差列于表3中(α =1,β =1,γ =1),預(yù)效果見圖4.
通過分析GNARX 模型應(yīng)用結(jié)果可知:
1)在明確系統(tǒng)輸入的情況下,ARX 和GNARX 模型比AR 和GNAR 模型更為精確,建模預(yù)測效果更好.
2)GNARX 模型應(yīng)用于仿真數(shù)據(jù)(包括線性和非線性模型數(shù)據(jù)),其建模和預(yù)測精度明顯高于其他模型,體現(xiàn)了GNARX 模型良好的建模預(yù)測能力.

表2 各模型對仿真數(shù)據(jù)建模預(yù)測的誤差對比

圖1 GNARX 模型對ARX 數(shù)據(jù)的預(yù)測效果

圖2 GNARX 模型對ARMAX 數(shù)據(jù)的預(yù)測效果
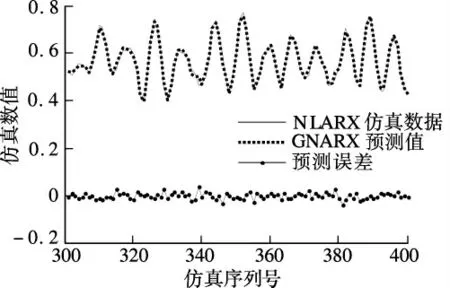
圖3 GNARX 模型對NLARX 數(shù)據(jù)的預(yù)測效果

表3 各模型對振動位移采樣電流建模預(yù)測的誤差對比

圖4 GNARX 模型對振動位移采樣電流數(shù)據(jù)預(yù)測效果圖
3)GNARX 模型應(yīng)用于振動位移采樣電流數(shù)據(jù),其建模預(yù)測效果同樣優(yōu)于其他模型,說明GNARX 模型適用于實際數(shù)據(jù)建模,具有工程應(yīng)用可行性.
4)GNARX 模型應(yīng)用于振動位移采樣電流數(shù)據(jù)的優(yōu)越性并不明顯,這可能是模型輸入選取不當(dāng)所造成的,說明動態(tài)切削力和振動位移2 組數(shù)據(jù)間并沒有明顯的輸入輸出關(guān)系.
4 結(jié)語
將影響系統(tǒng)輸入的相關(guān)數(shù)據(jù)作為外部輸入,在GNAR 模型的基礎(chǔ)上,提出了帶有外部輸入的線性/非線性自回歸模型——GNARX 模型,并給出了其一般表達式及其最小二乘參數(shù)估計方法.運用一種綜合考慮建模誤差、預(yù)測誤差及模型復(fù)雜度的修正AIC 準則,確定GNARX 模型結(jié)構(gòu),該準則通過改變重要度權(quán)系數(shù)來適應(yīng)不同的現(xiàn)場需求,不斷試驗與修改,尋求最優(yōu)模型.將該模型應(yīng)用于仿真和實際數(shù)據(jù),結(jié)果表明,GNARX 模型精度高,通用性好,無論是對ARX,ARMAX,NLARX 等模型的仿真數(shù)據(jù),還是對實際工程數(shù)據(jù),GNARX 模型都表現(xiàn)出了很好的建模預(yù)測能力,效果優(yōu)于傳統(tǒng)的時序模型及BP 網(wǎng)絡(luò).
由于非線性時間序列的分析與處理要比線性平穩(wěn)時序復(fù)雜得多,且GNARX 模型結(jié)構(gòu)相對冗長,在模型結(jié)構(gòu)的確定、適用性檢驗等方面尚無統(tǒng)一的方法和成熟的理論研究,因此,該模型的理論研究和實際應(yīng)用都有待進一步探討.
References)
[1]Box G E P,Jenkins G M,Reinsel G C.Time series analysis:forecasting and control[M].4th ed.Hoboken,USA:John Wiley &Sons Inc.,2008.
[2]Flores J J,Graff M,Rodriguez H.Evolutive design of ARMA and ANN models for time series forecasting[J].Renewable Energy,2012,44:225-230.
[3]Hansen P R,Huang Z,Shek H H.Realized GARCH:a joint model for returns and realized measures of volatility[J].Journal of Applied Econometrics,2012,27(6):877-906.
[4]楊叔子,吳雅,軒建平.時間序列分析的工程應(yīng)用:下冊[M].2 版.武漢:華中科技大學(xué)出版社,2007.
[5]陳茹雯,黃仁,張志勝,等.基于數(shù)學(xué)模型的視覺測量系統(tǒng)圖形畸變校正方法[J].機械工程學(xué)報,2009,45(7):243-248.
Chen Ruwen,Huang Ren,Zhang Zhisheng,et al.Distortion correction method based on mathematic model in machine vision measurement system[J].Journal of Mechanical Engineering,2009,45(7):243-248.(in Chinese)
[6]Huang Ren,Xu Feiyun,Chen Ruwen.General expression for linear and nonlinear time series models[J].Frontiers of Mechanical Engineering in China,2009,4(1):15-24.
[7]陳茹雯,黃仁,史金飛,等.線性/非線性時間序列模型一般表達式及其工程應(yīng)用[J].東南大學(xué)學(xué)報:自然科學(xué)版,2008,38(6):1077-1080.
Chen Ruwen,Huang Ren,Shi Jinfei,et al.General expression for linear and nonlinear time series model and Its engineering application[J].Journal of Southeast University:Natural Science Edition,2008,38(6):1077-1080.(in Chinese)
[8]Muhannad Z,Yusoff Z M,Rahiman M H F,et al.Modeling of steam distillation pot with ARX model[C]//IEEE 8th International Colloquium on Signal Processing and Its Applications.Melaka,Malaysia,2012:194-198.
[9]Sanandaji B M,Vincent T L,Wakin M B,et al.Compressive system identification of LTI and LTV ARX models[C]//50th IEEE Conference on Decision and Control and European Control Conference.Orlando,F(xiàn)L,USA,2011:791-798.
[10]Raniman M H F,Taib M N,Salleh Y M.Black box modeling of steam distillation essential oil extraction system using ARMAX structure[C]//International Conference on Intelligent and Advanced Systems.Kuala Lumpur,Malaysia,2007:1059-1062.
[11]Stefanoiu D,Seraficeanu C,Culita J.Identification of MIMO-ARMAX models for glycemia and sodium ions tests through Particle Swarm Optimization[C]//IEEE International Conference on Control and Automation.Christchurch,New Zealand,2009:643-650.
[12]Giardina C R,Chirlian P M.Proof of Weierstrass approximation theorem using band-limited functions[J].Proceedings of the IEEE,1973,61(4):512.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
天天愛科學(xué)(2020年6期)2020-09-10 07:22:44
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45