快速路交通事件檢測方法
2013-03-13 01:35:46李紅偉姜桂艷馬永鋒
東南大學學報(自然科學版) 2013年3期
關鍵詞:檢測
李紅偉 陸 鍵 姜桂艷 馬永鋒
(1 東南大學交通學院,南京210096)
(2 上海交通大學船舶海洋與建筑工程學院,上海200240)
(3 吉林大學交通學院,長春130022)
作為城市路網系統中的主要道路,快速路在整個城市交通系統中發揮著重要作用,如上海快速路道路面積占市中心道路面積的5%,卻承擔了市中心20%的交通量[1].因交通事件引起的擁堵已占上海快速路總擁堵的50%~75%[2].準確、及時的交通事件自動檢測(automatic incident detection,AID)算法可減少因交通事故造成的擁堵時間,降低人員傷亡以及財產損失.
目前,流行的交通數據采集設備是環形線圈檢測器和視頻檢測器.與視頻檢測器相比,環形線圈檢測器因具有價格適中,在雨、霧等惡劣天氣下仍可正常工作等優勢,而被廣泛應用.以線圈數據為基礎的AID 算法包括模式識別、統計預測、時間序列、交通流理論、智能檢測5 類,代表算法分別為California 算法[3]、貝葉斯算法[4]、自回歸綜合移動平均算法[5]、小波算法[6]以及神經網絡算法[7].這些算法均存在缺陷:California 算法誤警率高;貝葉斯算法復雜;自回歸綜合移動平均算法復雜,誤警率高;小波算法檢測率低;神經網絡算法復雜[8-9].此外,以上算法對低流量狀態下的事件檢測效果極差.
本文提出一種既能保證較高檢測率(detection rate)和較低誤報率(false alarm rate),又適用于各種流量的快速路AID 算法.
1 數據來源
本文提取了某城市快速路高架上的交通流歷史數據進行研究.該路段全長約14 km,包括主線、8 個出入口匝道和3 個立交,全程無信號控制.
由于快速路主線、匝道與高架上的交通流沖突類型、車輛運行特征存在差異[10],匝道分流點、合流點以及減速連接部、加速連接部處布設檢測器[11].主線處,平均每500 m 左右設置一個檢測截面,共布設88 組檢測器.匝道進口和出口附近各設置一個檢測截面,共布設42 組檢測器.路段兩端立交匝道出入口各設置一個檢測截面;第3 個立交出入口匝道上布設間距約200 m 的2 個檢測截面,立交共布設30 個檢測器.已有研究認為,事件檢測中檢測器間距在200~500 m 之間是合適的,由此可知,本文中檢測器布設間距合理[12].
檢測器可采集流量、地點平均車速(簡稱速度)和時間占有率(簡稱占有率)等參數,采集間隔為5 min.采集時間為2008-04-24—2008-05-26 每周的第1 個工作日.數據采集期間天氣晴好,路段沿線無大型活動和特殊交通管制,共采集了191 起交通事件,東側主線、東側匝道、西側主線、西側匝道各75,31,56,29 起.東側數據用于交通事故數據特征分析和建模,西側數據用于驗證模型的有效性.
2 理論基礎
2.1 時間序列
交通事故的時間序列包含事故發生、發展趨勢,可用于設計AID 算法[13].圖1給出了交通量數據時間序列.其中,x 軸為橫向時間序列,指數據以24 h 為坐標軸進行排列的序列;y 軸為縱向時間序列,指數據以相同工作日(如周一)為坐標軸進行排列的序列;z 軸為流量(輛/min).

圖1 交通量數據時間序列
現有的AID 算法多以橫向時間序列上的數據為研究基礎,對數據的穩定性和正態擬合性要求較高.本文利用均值標準誤差(standard error of mean,SEM)和Kolmogorov-Smirnov 正態性檢驗對比分析2 種時間序列上數據的波動性和正態擬合性,以選擇更適合建模需求的時間序列.
圖1中,橫向時間序列交通流變化趨勢復雜,為降低其波動性,根據其變化趨勢,將橫向時間分為4 段:①低峰,00:00—04:30;②激增,04:35—07:30;③高峰,07:35—17:30;④緩降,17:35—00:00.各階段的SEM 值和Kolmogorov-Smirnov驗證結果(P)如表1所示,其中,SEM 值越大,說明數據波動性越大;P 為顯著性水平,若P >0.05,表示沒有足夠證據證明樣本不符合正態分布,反之,表示數據不符合正態分布.

表1 SEM 值與Kolmogorov-Smirnov 檢驗
表1中,橫向時間序列上數據的SEM 值約為縱向時間序列的2~3 倍,說明縱向時間序列更穩定;縱向時間序列上數據的P 值均大于0.05,說明縱向時間序列正態擬合性更好.因此,本文選擇數據波動性更小、正態擬合性更顯著的縱向時間序列上的數據為建模基礎,建立快速路AID 算法.
2.2 突變理論
突變理論研究從一種穩定組態躍遷到另一種穩定組態的現象和規律,能較好地解釋和預測自然界和社會上的突然現象[14].交通事件下的交通流變化趨勢符合突變現象.未發生事件時,交通流參數在一定范圍內小幅上下波動;事件發生前期,交通流參數急劇降低;事件持續期間,交通流參數基本穩定在一定范圍內;事件發生后期,交通流參數急劇增加;事件結束,交通流參數在一定范圍內小幅波動.交通參數的突變特征可歸納為:
①多模態.事件未發生和發生時,交通流參數在不同區間內上下波動.
②不可達.未發生事件時,交通流參數所在區間是事件過程中的參數不能達到范圍,反之亦然.
③突跳.事件發生時,交通流參數由一個穩定的數值范圍突然跳到另一個穩定的數值范圍,這種變化是不連續的.
3 模型建立
3.1 參數選取
參數的選擇關系到AID 算法的效果.已有的AID 算法多采用占有率或流量作為輸入參數.事件發生時,單位車輛通過檢測器的時間增加,導致占有率增大;交通擁堵時,占有率亦可能增大.單純從占有率判斷是否發生交通事件不盡合理,流量存在同樣的問題.這表明,依靠單個交通參數無法很好地體現交通流運行狀態.事件發生過程中,占有率數值明顯增大,流量、速度明顯降低.因此,本文利用環形線圈檢測到的事件狀態下的流量、速度和占有率3 個參數設計新的AID 算法.
3.2 交通事件影響指數
根據統計理論和突變理論,提出交通事件影響指數I.I 定義為交通流參數預測值與實測值之比,計算公式如下:

式中,Ip(t)為t 時刻p 地點的交通事件影響指數;qp(t)為t 時刻p 地點的實測流量;vp(t)為t 時刻p地點的實測速度;op(t)為t 時刻p 地點的實測占有率;^qp(t)為正常交通狀態下t 時刻p 地點的預測流量;^vp(t)為正常交通狀態下t 時刻p 地點的預測速度;^op(t)為正常交通狀態下t 時刻p 地點的預測占有率.
事件發生后車流可能靜止,為防止檢測器檢測到的占有率為0,占有率加上一個常數0.001.
由于縱向時間序列穩定性好,從預測的簡易性考慮,用移動平均法預測交通參數,即

預測精度取決于時間窗口尺度n.若n <3,預測數據精度小于90%;若n >8,即2 個月后,預測數據精度降低,這是由于交通流具有季節性.因此,n∈(3,8).
3.3 交通事件影響指數特征分析
預測值由正常交通狀態下的歷史數據計算得到.未發生事件時,預測值與實測值相差不大,I 在數值1 左右波動;事件發生時,分母中的qp(t)和vp(t)降低,op(t)增大,實測值顯著降低,預測值明顯大于實測值,I 值遠遠大于1.事件狀態下的I 值變化特征如圖2所示.
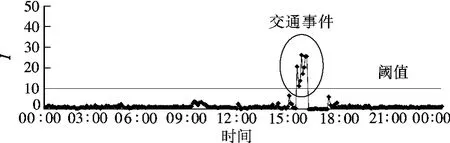
圖2 事件狀態下的事故影響指數變化趨勢
3.4 確定閾值
本文利用I 值累積分布曲線(見圖3)及檢測率(RD)和誤報率(RFA)關系曲線(見圖4)確定交通事件判斷的閾值.圖3中,RD值等于100%減去該閾值下的累積百分數.I =8 時,RD=100%;I=9 時,RD=95%;I=10 時,RD=90%;I =11 時,RD=85%.圖4中,I =8 時,RFA=36.72%;I =9時,RFA=27.18%;I =10 時,RFA=1.69%;I =11時,RFA降至0%.由以上結果分析得出,閾值應取10.
基于以上原因,“是否發生交通事件”的問題就歸結為“在t 時刻的I 值是否屬于某個區間”的下述檢驗問題:
原假設H I∈(0,10)
對立假設K I?[10,+∞)
假設成立,未發生事件;反之,發生事件.

圖3 事故影響指數的頻率及累積頻率

圖4 RD-RFA曲線
4 模型驗證
4.1 對比檢驗
一般用檢測率RD、誤報率RFA和平均檢測時間DMTT三個指標檢測AID 算法的性能.作為經典的AID 算法,California 算法應用效果已在實際應用中得到充分證明,本文利用California 算法驗證本文提出的事件數據影響指數算法的性能,對比結果見表2.

表2 檢測結果對比 %
由表2可以得出以下結論:
1)California 算法RD=85%,事件數據影響指數算法RD=94.56%,后者的RD值比前者高近10%,說明本文算法的檢測率可以滿足檢測率要求.
2)California 算法RFA=0.64%,事件數據影響指數算法RFA=0%,后者的誤報率低于前者,說明本文算法基本不會誤判交通事件.
3)若以California 算法檢測出事件的時間為參考時間,本文算法可提前5 min 檢測出交通事件.
權衡RD,RFA及DMTT三個評價指標,可以發現本文算法的檢測效果更好.
4.2 不同閾值檢測效果對比
西側主線、西側匝道的交通事故數分別為56,29.當閾值為12,11,10,9,8 時,西側主線檢測出的交通事故數分別為38,42,54,55,56,被誤判的交通事故數為0,0,0,1,7;西側匝道檢測出的事故數為22,25,28,29,29,被誤判的交通事故數為0,0,0,2,5.
不同閾值下的RD和RFA值如表3所示.對西側主線而言,RD= 100% 時,閾值為8,RFA=12.50%;閾值為10,11,12 時,RFA均為0%,RD值分別為94.64%,75.00%和67.86%.

表3 不同閾值下的檢測結果 %
為了保證誤檢率和檢測率均達到最優,選擇I=10 作為閾值.同理,西側匝道的交通事件檢測方法的最優閾值同樣為10.此結果說明了本文提出的閾值確定方法是正確的.
4.3 不同流量情況下的檢測效果
圖5中,事件1,2,3,4 的發生時段分別為0:55—1:15,5:55—6:05,15:15—15:50,20:20—20:55,其中,事件1,2,3 為一次事故,事件4 為二次事故.結合圖1中交通流量的4 個時段,事件1發生在低峰時段,事件2 發生在流量激增時段,事件3 發生在高峰時段,事件4 發生在流量緩降時段.

圖5 不同流量下的事故影響指數變化趨勢
由圖5可得到以下結論:
1)大于閾值的I 值所在時間內均發生交通事件;小于閾值的I 值所在時間內均未發生交通事件.
2)事件發生過程中,當I 值變化曲線為U 形曲線時,表示本次事件發生了二次事故,如事件4所示.
3)I 值對低流量比高流量更敏感,說明本方法不僅能在高峰、平峰時段檢測出交通事件,對低流量時發生的交通事件檢測效果更好,即本文算法適用于各種流量.
4)未發生事件時,I 值在1 左右上下浮動,浮動范圍不超過10;發生事件時,I 值突變,突變幅度很大,說明本文算法的檢測性能不受交通流變化趨勢的影響,只受交通事件的影響.這也解釋了本文算法比California 算法檢測性能更好的原因,同時說明了本文算法的閾值更容易確定.
5 結論
1)本文算法的檢測率比California 算法高出近10%,誤檢率為0,可提前5 min 檢測出交通事件.說明本文算法具有良好的性能.
2)I 值在低流量時比高流量反應更敏感,說明本算法不僅能在高峰、平峰時段檢測出交通事件,對低流量時發生的交通事件檢測效果更好,即本文算法適用于各種流量的情況.
3)本文算法的檢測性能不受交通流變化趨勢的影響,只受交通事件的影響.
References)
[1]唐海雯.實時監控 及時處置 為排堵保暢做貢獻[J].交通與運輸,2006(2):10-11.
[2]姬楊蓓蓓,張小寧,孫立軍.基于貝葉斯決策樹的交通事件持續時間預測[J].同濟大學學報:自然科學版,2008,36(3):319-324.
Jiyang Beibei,Zhang Xiaoning,Sun Lijun.Incident duration prediction grounded on Bayesian decision method based tree algorithm[J].Journal of Tongji University:Natural Science,2008,36(3):319-324.(in Chinese)
[3]Payne H J,Helfenbein E D,Knobel H C.Development and testing of incident detection algorithms[R].Washington,DC,USA:Federal Highway Administration,1976.
[4]Abuelela M,Olariu S.Automatic incident detection in VANETs:a Bayesian approach[C]//IEEE Vehicular Technology Conference.Barcelona,Spain,2009:1-5.
[5]Moynihan G P,Fonseca D J,Brumback T,et al.Design of a decision support system for road incident detection and characterization[C]//Proceedings of the 2009 ASCE International Workshop on Computing in Civil Engineering.Austin,USA,2009:613-322.
[6]Jeong Y-S,Castro-Neto M,Jeong M K,et al.A wavelet-based freeway incident detection algorithm with adapting threshold parameters[J].Transportation Research Part C,2009,19(1):1-19.
[7]Ritchie S G,Cheu R L.Simulation of freeway incident detection using artificial neural networks[J].Transportation Research Part C,1993,1(3):203-217.
[8]Jian L,Shuyan C,Wei W.A hybrid model of partial least squares and neural network for traffic incident detection[J].Expert Systems with Applications,2012,39(5):4775-4784.
[9]Subramaniam S.Literature review of incident detection algorithms to initiative diversion strategies[R].Blacksburg,VA,USA:Virginia Polytechnic Institute,1991.
[10]王欣,李文權,王煒.基于駕駛行為共性的回波速度解釋及仿真[J].東南大學學報:自然科學版,2007,37(4):691-694.
Wang Xin,Li Wenquan,Wang Wei.Interpreting and emulating echo wave speed based on common characteristics of driving behavior[J].Journal of Southeast University:Natural Science Edition,2007,37(4):691-694.(in Chinese)
[11]陳雨人,鄭仕文,童世鑫,等.區域高速公路網絡交通事件傳感器布設方法研究[J].公路交通科技,2010,27(11):143-148.
Chen Yuren,Zheng Shiwen,Tong Shixin,et al.Study on deployment of traffic incident detectors for regional expressway network[J].Journal of Highway and Transportation Research and Development,2010,27(11):143-148.(in Chinese)
[12]Awadallah F.Incident detection:selection of appropriate technologies and methodologies[J].Road Transport Research,2002,11(2):50-56.
[13]Daniel D G,Francisco J,David G O.Wavelet-based denoising for traffic volume time series forecasting with self-organizing neural networks [J].Computer-Aided Civil and Infrastructure Engineering,2010,25(7):530-545.
[14]Stamovlasis D,Tsaparlis G.Applying catastrophe theory to an information-processing model of problem solving in science education [J].Science Education,2010,96(3):392-410.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48