遙操作工程機(jī)器人運(yùn)動(dòng)覺提示平臺(tái)的設(shè)計(jì)與實(shí)現(xiàn)
2013-03-21 07:38:32袁佳潔李笑
機(jī)床與液壓 2013年5期
袁佳潔,李笑
(廣東工業(yè)大學(xué)機(jī)電工程學(xué)院,廣東廣州510006)
具有臨場(chǎng)感技術(shù)的遙操作工程機(jī)器人在一些人類難以接近的場(chǎng)合,如地震、冰災(zāi)等一些自然災(zāi)害搜救現(xiàn)場(chǎng),具有廣泛的應(yīng)用前景。臨場(chǎng)感技術(shù)以人為中心,通過各種傳感器將遠(yuǎn)地機(jī)器人與環(huán)境的交互信息(包括視覺、力覺、觸覺、聽覺、運(yùn)動(dòng)覺等)實(shí)時(shí)地反饋到本地操作者(人)處,生成和遠(yuǎn)地環(huán)境一致的虛擬環(huán)境,使操作者產(chǎn)生身臨其境的感受,從而實(shí)現(xiàn)對(duì)機(jī)器人帶感覺的控制,完成作業(yè)任務(wù)[1]。運(yùn)動(dòng)覺是臨場(chǎng)感的重要組成部分,具有運(yùn)動(dòng)覺提示的遙操作工程機(jī)器人能使操作者更逼真地沉浸入機(jī)器人環(huán)境當(dāng)中,更有效地控制和操作機(jī)器人。
國內(nèi)外學(xué)者對(duì)遙操作工程機(jī)器人的運(yùn)動(dòng)覺提示進(jìn)行了大量研究[2-4]。文獻(xiàn)[4]提出了一種遙操作工程機(jī)器人六自由度運(yùn)動(dòng)覺反饋方法,該方法采用6個(gè)液壓缸驅(qū)動(dòng)平臺(tái),通過位移傳感器檢測(cè)出缸的位移,構(gòu)成閉環(huán)控制系統(tǒng),實(shí)現(xiàn)了對(duì)工程機(jī)器人的六自由度運(yùn)動(dòng)覺反饋,但結(jié)構(gòu)較為復(fù)雜。而機(jī)器人在一般工程作業(yè)現(xiàn)場(chǎng),很少有六自由度的復(fù)雜運(yùn)動(dòng),多為俯仰、翻滾和升降的復(fù)合運(yùn)動(dòng),三自由度運(yùn)動(dòng)覺反饋基本可以滿足要求。因此,作者設(shè)計(jì)了一種三自由度運(yùn)動(dòng)覺提示平臺(tái),該平臺(tái)結(jié)構(gòu)簡(jiǎn)單,實(shí)現(xiàn)了機(jī)器人的三自由度運(yùn)動(dòng)提示。
1 平臺(tái)系統(tǒng)設(shè)計(jì)
1.1 平臺(tái)結(jié)構(gòu)設(shè)計(jì)
圖1為遙操作工程機(jī)器人運(yùn)動(dòng)覺提示系統(tǒng)。該系統(tǒng)主要由工程機(jī)器人、運(yùn)動(dòng)覺提示平臺(tái)和計(jì)算機(jī)組成。操作者坐在平臺(tái)座椅上通過手柄操縱工程機(jī)器人作業(yè),機(jī)器人運(yùn)動(dòng)信號(hào)通過安裝在機(jī)器人端的加速度傳感器檢測(cè),并送入計(jì)算機(jī)。計(jì)算機(jī)輸出平臺(tái)控制信號(hào),控制平臺(tái)跟隨工程機(jī)器人運(yùn)動(dòng),對(duì)操作者進(jìn)行運(yùn)動(dòng)覺提示。
作者設(shè)計(jì)的運(yùn)動(dòng)覺提示平臺(tái)主要由底板、3個(gè)液壓缸、連桿機(jī)構(gòu)、支承板、座椅、手柄等組成,可使平臺(tái)產(chǎn)生俯仰 (± 17°)、翻滾 (± 17°)和升降(±100 mm)三自由度運(yùn)動(dòng)。

圖1 遙操作工程機(jī)器人運(yùn)動(dòng)覺提示系統(tǒng)
1.2 平臺(tái)液壓系統(tǒng)設(shè)計(jì)
平臺(tái)液壓系統(tǒng)的原理如圖2所示,油源壓力由溢流閥4 調(diào)定,由蓄能器8 穩(wěn)壓。改變各電液比例方向閥輸入電壓信號(hào)可分別控制各液壓缸的位移,液壓缸的位移通過內(nèi)置的位移傳感器檢測(cè)。

圖2 平臺(tái)液壓系統(tǒng)原理圖
1.3 平臺(tái)測(cè)控系統(tǒng)設(shè)計(jì)
平臺(tái)測(cè)控系統(tǒng)原理如圖3所示,主要參數(shù)如表1所示。
安裝在遠(yuǎn)端工程機(jī)器人的傳感器3個(gè)軸的加速度信號(hào)和3個(gè)液壓缸的位移信號(hào)經(jīng)數(shù)據(jù)采集卡采集,完成A/D轉(zhuǎn)換,輸入到計(jì)算機(jī)進(jìn)行控制運(yùn)算,得到控制信號(hào),經(jīng)模擬量輸出卡完成D/A轉(zhuǎn)換,輸出給3個(gè)比例方向閥。

圖3 測(cè)控系統(tǒng)原理圖

表1 系統(tǒng)主要參數(shù)
2 三自由度運(yùn)動(dòng)覺提示方法
圖4為平臺(tái)三自由度運(yùn)動(dòng)覺提示流程圖。加速度傳感器檢測(cè)工程機(jī)器人運(yùn)動(dòng)的俯仰角θr、翻滾角φr和升降位移wr,輸出沿其敏感軸x、y 和z的加速度ax、ay和az。通過信號(hào)轉(zhuǎn)換運(yùn)算得到機(jī)器人的俯仰角θ、翻滾角φ 和升降位移w 三自由度運(yùn)動(dòng)信息。通過運(yùn)動(dòng)學(xué)逆解,得到3個(gè)液壓缸的位移設(shè)定信號(hào)S1、S2和S3。位移傳感器將液壓缸位移信號(hào)S'1、S'2和S'3反饋給控制器,構(gòu)成閉環(huán)控制系統(tǒng)。對(duì)平臺(tái)進(jìn)行運(yùn)動(dòng)學(xué)正解后,得到平臺(tái)運(yùn)動(dòng)的俯仰角θ'、翻滾角φ'和升降位移w'。將其分別與測(cè)得的機(jī)器人運(yùn)動(dòng)的俯仰角θ、翻滾角φ 和升降位移w 進(jìn)行比較,可分析平臺(tái)的跟隨特性。

圖4 運(yùn)動(dòng)覺提示流程圖
2.1 運(yùn)動(dòng)信號(hào)的檢測(cè)
加速度傳感器的敏感軸的坐標(biāo)系如圖5所示,定義x軸與水平面的夾角為俯仰角θ,y軸與水平面的夾角為翻滾角φ。

圖5 加速度傳感器敏感軸坐標(biāo)系
當(dāng)傳感器放置在水平面時(shí),俯仰角θ為0,在其各軸方向上的加速度分別為:

式中:g為重力加速度。
當(dāng)加速度傳感器x軸與水平面產(chǎn)生俯仰角θ時(shí),如圖6所示,在其各軸方向上的加速度分別為[5]:

由式(2)可得俯仰角為:

同理,可得到翻滾角為:

如圖7所示,當(dāng)加速度傳感器發(fā)生三自由度運(yùn)動(dòng)時(shí),z軸會(huì)產(chǎn)生與豎直方向的一個(gè)坡角γ,此時(shí)z軸輸出加速度az為:

式中:aH為豎直方向的加速度,即升降加速度。
由式(5)得:

坡角為:

升降位移w可通過豎直方向的加速度aH兩次積分得到。

圖7 z 方向的加速度測(cè)量
2.2 運(yùn)動(dòng)學(xué)逆解
平臺(tái)支承板的坐標(biāo)系如圖8所示。

圖8 平臺(tái)支承板的坐標(biāo)系
由機(jī)器人運(yùn)動(dòng)學(xué)相關(guān)知識(shí)可以得知[6]:

式中:(Pix,Piy,Piz)為支撐板各支點(diǎn)的初始坐標(biāo);(P'ix,P'iy,P'iz)為支承板經(jīng)俯仰、翻滾和升降運(yùn)動(dòng)后的坐標(biāo);i=1,2,3。
由圖8所示,各支點(diǎn)初始坐標(biāo)為:

式中:R為過平臺(tái)三支點(diǎn)圓的半徑。
平臺(tái)連桿結(jié)構(gòu)示意圖如圖9所示。
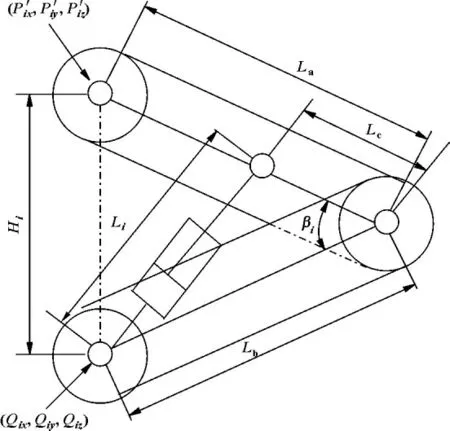
圖9 平臺(tái)連桿結(jié)構(gòu)示意圖
由圖9所示的幾何關(guān)系得:


式中:(Qix,Qiy,Qiz)為底板各支點(diǎn)的坐標(biāo);Si為各缸的實(shí)時(shí)位移;Si0為各缸的初始位移。
底板各支點(diǎn)的坐標(biāo)為:

式中:H0為平臺(tái)初始化的高度。
由式(8)— (18)可求得各缸的實(shí)時(shí)位移Si與俯仰角θ、翻滾角φ 和升降位移w的關(guān)系。將解算出的各個(gè)缸位移設(shè)定信號(hào)S1、S2和S3與傳感器檢測(cè)到的位移S'1、S'2和S'3之間的偏差作為控制器輸入信號(hào)。
2.3 運(yùn)動(dòng)學(xué)正解
根據(jù)平臺(tái)結(jié)構(gòu),得:

由式(12)、式(13)和式(19)可得到:

由平臺(tái)幾何關(guān)系,可知:

支承板經(jīng)俯仰、翻滾和升降三自由度運(yùn)動(dòng)后,點(diǎn)P1、P2和P3主要是z坐標(biāo)變化,x 和y坐標(biāo)變化很小,可以忽略不計(jì),此時(shí)新的三支點(diǎn)坐標(biāo)組成的矩陣為:

式中:Pix、Piy為支承板各支點(diǎn)初始狀態(tài)的坐標(biāo)值。
如圖10所示,如果沿x軸和y軸方向,坡角分別為-θ'和-φ'的梯度向量分別為P 和Q,設(shè)坐標(biāo)系各坐標(biāo)軸的單位向量分別為i,j,k,則向量P 和Q分別為:

支承板的法向量R為:

由圖10可知:

這里:

由式(27)— (31)可求得:


圖10 變換后支承板示意圖
2.4 程序設(shè)計(jì)
圖11為主程序流程圖,實(shí)現(xiàn)的主要功能如下:數(shù)據(jù)采集、傾角和位移計(jì)算、運(yùn)動(dòng)學(xué)逆解、PID控制和運(yùn)動(dòng)學(xué)正解。

圖11 主程序流程圖
3 實(shí)驗(yàn)研究
為了驗(yàn)證所提出的運(yùn)動(dòng)覺提示方法的有效性,進(jìn)行了平臺(tái)運(yùn)動(dòng)跟隨性實(shí)驗(yàn)研究。實(shí)驗(yàn)時(shí),使傳感器產(chǎn)生俯仰、翻滾和豎直3個(gè)自由度的運(yùn)動(dòng)。圖12、圖13 和圖14分別為平臺(tái)實(shí)測(cè)俯仰角、翻滾角和升降位移與加速度傳感器的俯仰角、翻滾角和升降的對(duì)比曲線。可以看出,平臺(tái)能較好地跟隨加速度傳感器的運(yùn)動(dòng)。

圖12 俯仰角對(duì)比曲線

圖13 翻滾角對(duì)比曲線
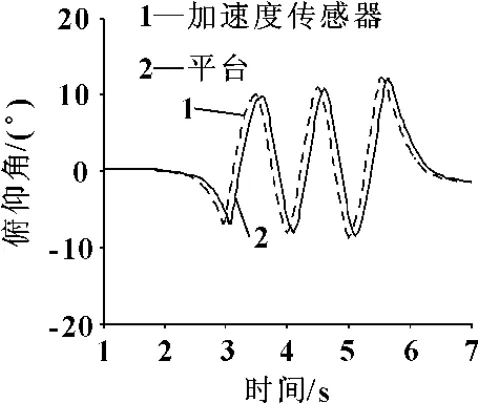
圖14 升降位移對(duì)比曲線
4 結(jié)論
以獲得遙操作工程機(jī)器人的臨場(chǎng)運(yùn)動(dòng)感覺為目的,設(shè)計(jì)了一種三自由度運(yùn)動(dòng)覺提示平臺(tái)。實(shí)驗(yàn)證明了該平臺(tái)能實(shí)現(xiàn)對(duì)遠(yuǎn)端工程機(jī)器人運(yùn)動(dòng)信息的反饋。該平臺(tái)結(jié)構(gòu)簡(jiǎn)單,運(yùn)動(dòng)覺提示方法可行,對(duì)設(shè)計(jì)工程應(yīng)用型遠(yuǎn)程操作機(jī)器人有參考作用。
【1】劉寒冰,趙丁選.臨場(chǎng)感遙操作機(jī)器人綜述[J].機(jī)器人技術(shù)與應(yīng)用,2004(1):42-45.
【2】YAMADA H,MUKOTA S,ZHAO D,et al.Construction Tele-robot System with Virtual Reality(Development of a bilateral construction robot)[C]//4th International Conference on Virtual Systems and Multimedia,Gifu,Japan,1998:152-157.
【3】YAMADA Hironao,MUTO Takayoshi.Development of a Hydraulic Tele-operated Construction Robot Using Virtual Reality(New Master-slave Control Method and an Evaluation ofa Visual Feedback System)[J].International Journal of Fluid Power,2003(2):35-42.
【4】趙丁選,黃海東,宮文賦,等.遙操作工程機(jī)器人系統(tǒng)臨場(chǎng)感技術(shù)研究:6自由度臨場(chǎng)運(yùn)動(dòng)感覺反饋技術(shù)的研究進(jìn)展[J].工程設(shè)計(jì)學(xué)報(bào),2002(8):127-130.
【5】蔣瑞挺.基于加速度傳感器的傾角測(cè)量[J].電子制作,2010(10):37-39.
【6】蔡自興.機(jī)器人學(xué)[M].北京:清華大學(xué)出版社,2009.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
太空探索(2016年6期)2016-07-10 12:09:06
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
筑路機(jī)械與施工機(jī)械化(2015年11期)2015-07-01 16:28:43