改進模糊自整定PID控制器及在GLCC液位控制中的應用
2013-04-06 09:39:26朱樂濤薛美盛
石油化工自動化 2013年2期
朱樂濤,薛美盛
(中國科學技術大學自動化系,合肥230026)
近年來,為適應國民經濟、社會發展和人民生活對能源的需求以及應對能源日益緊缺、消費和需求量大幅攀升等問題,各國都加大了對石油和天然氣資源的開發。在開采過程中,為確定各油井原油、天然氣產量,了解地層油氣含量及地層結構的變化,需要對油井產出液各相的體積流量或質量流量進行連續的計量并提供實時計量數據,從而優化生產參數,提高采收率。因此,油井井口的三相計量技術就顯得尤為重要[1-2]。
氣-液柱狀旋流式分離器GLCC(Gas Liquid Cylindrical Cyclone)多相流計量系統[1-5]是針對上述問題而開發的代表性裝置,結構如圖1所示。通過使用具有特定結構的柱狀旋流式分離器,氣液相混合物由旋流轉動產生的離心力和重力進行分離,形成一個倒圓錐的渦流面,進而實現油氣井產出物的氣液分離。由于裝置體積小、集成化程度高、滯后時間短,微型GLCC多相流量計已廣泛應用于陸上和海上平臺油氣產量的單井連續計量和分隊連續計量。
GLCC多相流計量裝置的性能依賴于氣液分離效果,因而當油氣井多相流量不穩定時,尤其在產生嚴重段塞流或井位切換情況下,氣液相比率通常發生較大變化,導致GLCC分離器內壓力和液位波動,造成氣串液(gas carry-over)和(或)液串氣(liquid carry-under)現象,嚴重影響分離器的分離效果,且可能導致流量計頻繁卡堵和損壞,從而最終影響GLCC多相流量計量裝置的有效運行[3,6-7]。因此,實現該類流量計量裝置精確計量的關鍵是分離裝置中氣相壓力和液相液位盡可能地保持恒定。文獻[5]的研究指出氣串液、液串氣主要取決于GLCC分離裝置中的液位,因而設計合適的控制策略保證GLCC中液位的穩定對整個計量的高效運行就尤為重要。
目前,對GLCC分離裝置內部液位的控制主要是采用傳統的固定參數的PID控制器進行控制[7-8]。傳統的固定參數PID控制器能針對特定模型、特定性能指標整定得到較好的一組控制參數[9],卻無法針對GLCC分離裝置入口端多相流的變化而相應地改變控制器參數從而實現液位波動幅度的減小及波動時間的縮短。因此,為了達到更好的液位控制效果,研究具有自動調整能力的PID控制器就尤為關鍵。鑒于在先進的控制算法中模糊控制能根據控制系統的實際響應情況,運用模糊推理進行自動調整和決策[10-11],因而在研究GLCC液位控制中嘗試采用將PID控制和模糊控制相結合的模糊自整定PID控制器進行控制,在此基礎上針對控制器的初始參數選取提出了一種基于擾動下液位誤差積分時間指標最優的參數選取方案,通過仿真驗證控制性能的進一步改善。
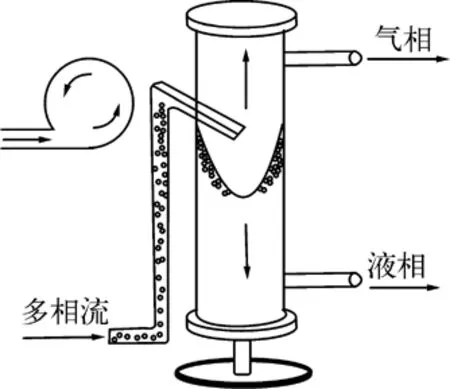
圖1 簡單的GLCC分離裝置示意
1 GLCC液位控制模型及控制器參數選定
1.1 GLCC液位控制回路模型
文中對GLCC液位控制研究選用的模型對象為文獻[8]中使用的GLCC分離裝置,該模型對象主要由GLCC分離器、液位變送器、控制器、氣動傳輸環節、液相調節閥等部分構成。建模時以穩態時GLCC分離裝置中液位H的相對變化量作為輸入,實際的液位變化量為輸出,將入口端液相流速視為模型的擾動,整個系統的模型如圖2所示。
圖2中Gp為GLCC分離裝置的開環傳遞函數,表達式為Gp
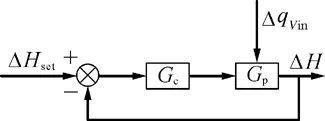
圖2 GLCC液位控制回路結構示意
圖2中,ΔHset為控制回路的輸入設定液位與所要求穩定液位的相對值,在穩態時應為0;ΔH為液位變送器測量得到的實際液位與所要求穩定液位的相對值;ΔqVin為GLCC分離裝置中入口端因氣液相比率發生變化而造成的液相流的相對變化值,單位為m3/s;Gc為完成GLCC液位控制的PID控制器或模糊PID控制器(由于極端情況下出現的嚴重阻塞流,輸入更接近于斜坡輸入[8],所以模型中已含有積分項,但控制器的設計中積分環節仍需保留),在常規PID控制下,表達式為

式中:KP,KI,KD——比例系數、積分系數和微分系數。
1.2 常規PID控制器參數選定
由于在實際應用中,GLCC分離裝置中的設定液位都保持恒定,模型框圖中的ΔHset恒定為0,在進行控制器的設計時將模型框圖進行變換,對ΔqVin-ΔH或ΔqVin-ΔqVout(ΔqVout為GLCC分離裝置中出口端的液相流速)關系進行分析進而設計控制器。在文獻[8]中,實現液位控制的PID控制器參數利用根軌跡法進行試探選取,得到3個參數依次為KP=4.387,KI=1.197,KD=3.989。而在本文的研究中,由于模糊PID控制器在實現控制時必須要有1組KP,KI,KD的初始常數值KP0,KI0,KD0。選取時依據模型中ΔqVin-ΔqVout關系曲線,利用工程上常用的Z-N整定法[9—11]整定得到1組初始化參數為KP0=1.296 0,KI0=0.683 5,KD0=0.614 3,作為后文中對模糊PID控制器及其優化改進研究中的初始參數。令ΔqVin為幅值等于2.8×10-3m3/s的階躍擾動輸入,在Matlab中仿真觀察PID參數分別為KP=4.387,KI=1.197,KD=3.989和KP0=1.296 0,KI0=0.683 5,KD0=0.614 3下的ΔqVin-ΔqVout和ΔqVin-ΔH響應曲線,分別如圖3和圖4所示。

圖3 兩組不同PID參數下的出口端流速響應曲線
圖3,圖4中,曲線1表示經過Z-N整定得到的控制器作用下的ΔqVin-ΔqVout和ΔqVin-ΔH響應曲線;曲線2為引用文獻中的一組參數得到的響應曲線。由于Z-N整定法是一種基于經驗的常用于工程中的粗略方法,參數選取方法簡單快捷,但通過2組曲線的比較,整定得到的控制器產生的響應輸出超調較大,調節時間較長,直接應用于GLCC液位控制中效果很差。由于文中的研究主要改進之處在于對控制器的初始參數進行優化改進性能,因而對該組參數仍進行保留并在后文中在該組參數優化的基礎上驗證控制器性能的改進。
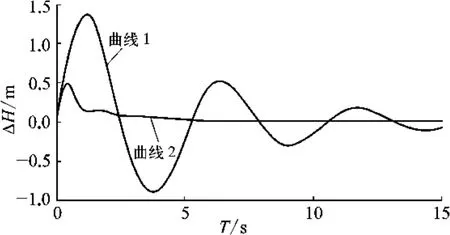
圖4 兩組不同PID參數下的液位響應曲線
2 模糊自整定PID控制器及其改進
2.1 模糊自整定PID控制器的原理及實現
在上文中已經指出,現有的針對GLCC液位控制選用的控制器為固定參數的PID控制器,對于入口端因多相流變化造成的液相流速擾動不能及時地在線調整而產生更優的控制信號,改善控制效果。考慮現代智能控制中的模糊控制策略能夠進行模糊邏輯推理的特點,將其和傳統的PID控制結合起來,構成模糊自整定PID控制器,對擾動作用下控制器的系數KP,KI,KD進行在線調整,以取得控制效果的改進,如圖5所示。
圖5中,KP,KI,KD分別為控制器的3個參數,e和ec為設定值和實際輸出值的誤差及導數并作為控制器中模糊推理部分的兩個輸入。在進行控制前先建立PID控制器3個參數的增量ΔKP,ΔKI,ΔKD與e和ec之間的關系表,開始控制后不斷檢測計算e和ec,通過模糊規則表推理計算對3個參數進行在線修改,產生更優的控制作用。
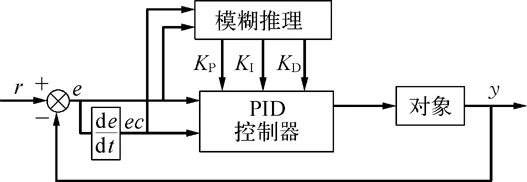
圖5 模糊自整定PID參數控制系統
在進行模糊規則表的設計時將液位偏差e和誤差變化ec的變化范圍定義為模糊集上的論域{-3,-2,-1,0,1,2,3},模糊子集設置為{NB,NM,NS,ZO,PS,PM,PB},子集中的元素表示負大、負中、負小、零、正小、正中、正大,整定得到的參數值與初始值的關系為
根據常規PID控制器中KP,KI,KD3個參數對控制效果的不同作用[9],設計ΔKP,ΔKI,ΔKD的模糊規則表。
在Matlab中利用模糊控制工具箱實現該兩輸入三輸出的模糊控制器,并在Simulink中完成模糊自整定PID控制器的搭建。
為了驗證模糊自整定PID控制器對控制效果的改善,取文獻[8]中參數KP=4.387,KI=1.197,KD=3.989作為初始化參數與該文獻中采用的常規PID控制器控制效果進行比較,得到ΔqVin-ΔqVout和ΔqVin-ΔH響應曲線分別如圖6,圖7所示。
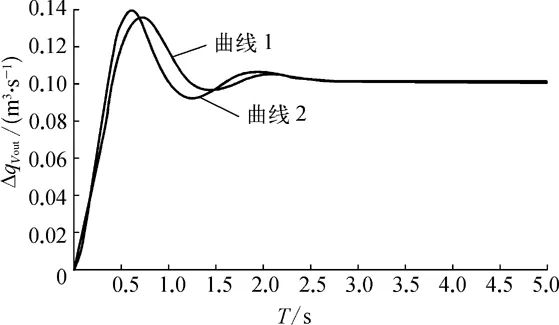
圖6 常規PID和模糊PID控制的出口端流速響應
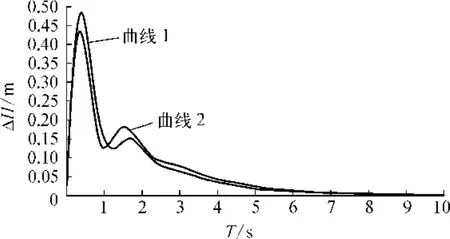
圖7 常規PID和模糊PID控制的液位響應
圖6,圖7中,曲線1為常規PID控制下的響應曲線;曲線2為模糊自整定PID控制下的響應曲線。通過對比可以看出采用模糊自整定PID控制后由于參數能自適應調整,對于入口端2.5×10-3m3/s的擾動,出口端的液相流速比常規控制下能提前產生動作并且最大峰值得到提高,從而在擾動造成GLCC分離裝置內液相體積增大后能加快排出液相流,使得液位波動的幅值也降低。
2.2 PID控制器的改進及仿真驗證
在對模糊自整定PID控制器的設計和仿真中可以看出,每一步KP,KI,KD都是在初始值的基礎上加上或減去一個增量調整得到,繼而調節控制輸出。模糊控制表的建立是為了更好地選取該增量,而另一方面初始值的選取是基礎,對模糊自整定PID的控制效果的決定作用同樣重要。在本文的改進中,分離效果的好壞取決于液位保持穩定的能力,而液位變化的程度可以用波動幅值H和波動時間T進行描述,因而在選取控制器的初始參數時,應滿足使液位變化的程度最小(即最優)的條件,并在選取優化的目標函數時將H和T均考慮在內。考慮在一定的時間之后將GLCC分離裝置內部的液位恒定在原來的設定值,也就是H能達到或趨近0,所以在選擇優化的目標函數時取液位時間積分值為目標函數,積分后的結果為關于變量KP,KI,KD的函數,即F=F(KP,KI,KD),對該函數值進行最小化尋優,從而得到1組KP,KI,KD值。
相比原來設計控制器時需對控制器參數進行反復計算驗證選取,利用目標函數優化的改進控制策略降低了對初始參數值的約束限制,使對初始參數值的要求變低,即便初始值的指標性能較差,但經過第一步的函數尋優得到結果后,進而用于模糊自整定PID控制器仍能取得滿意的效果。
在具體實現時通過借助Matlab軟件強大的圖形數據交互功能,在Simulink中原有的s域模型框圖的基礎上將目標函數的時域形式進行拉氏變換,再借助Matlab中自帶的最小化優化函數fminsearch(),尋優得到參數結果。
為了驗證引入優化后對控制性能的改進,仍選取上文中的2組參數KP=4.387,KI=1.197,KD=3.989和KP0=1.296 0,KI0=0.683 5,KD0=0.614 3,其中KP,KI,KD保持不變,將KP0,KI0,KD0作為優化部分的初始化參數,按上述步驟對目標函數最優化得到1組新的參數KP1=9.706 4,KI1=4.209 7,KD1=6.126 2,將該組參數替換為模糊自整定PID控制器的初始參數,在ΔqVin=2.8×10-3m3/s的階躍擾動下觀察ΔqVin-ΔqVout和ΔqVin-ΔH響應曲線分別如圖8,圖9所示。
圖8,圖9中,曲線1為常規PID控制下的響應曲線;曲線2為在改進的模糊自整定PID控制器作用下的響應曲線。可以看出在圖8中擾動加載后曲線2相比曲線1的ΔqVout快速增加,以使分離裝置中多余的液相流盡可能快地排出;圖9中模糊自整定PID作用下的曲線相比原來固定參數PID控制器作用下的曲線,液位變化的幅值大幅降低并且液位恢復穩定的時間也明顯地減少。結合圖3,圖4不難看出引入模糊自整定PID控制器以及對GLCC液位波動指標函數的優化改進后,GLCC分離裝置中液位控制性能得到了進一步的改進。
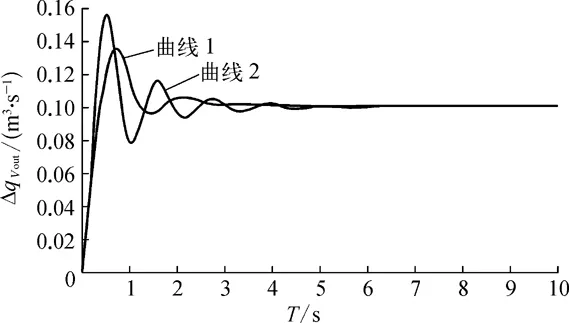
圖8 常規PID和改進的模糊PID控制的出口端流速響應曲線

圖9 常規PID和改進的模糊PID控制的液位響應曲線
另一方面,當擾動發生變化時由于模糊自整定PID控制器具有在線調整控制器參數的功能,因而相比參數取為優化值的固定參數PID控制器,液位響應曲線應同樣得到進一步改善。因此,將擾動進一步加大為ΔqVin=6.44×10-3m3/s進行仿真驗證,液位ΔH仿真結果如圖10所示。
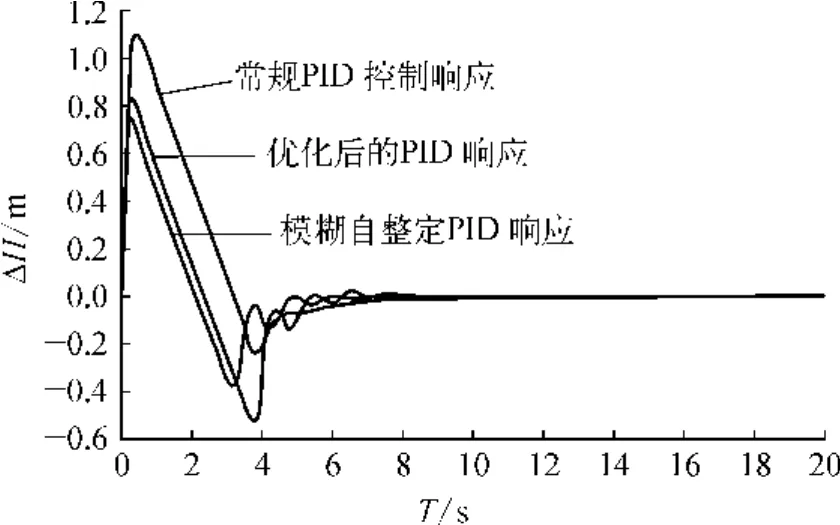
圖10 擾動加劇后各個控制器作用下的液位響應曲線
由圖10可以看出,當入口端液相流量發生劇烈變動,由原有的2.8×10-3m3/s增加到6.44× 10-3m3/s(增加130%),模糊自整定PID控制器使得液位波動的幅度最小,達到液位穩定的時間最短,使得GLCC分離裝置中液位控制性能得到了進一步的改善。
3 結束語
針對GLCC分離裝置中的液位控制,文中的研究中引入了模糊自整定PID控制器,并在此基礎上提出了利用擾動下液位響應曲線建立優化目標函數對KP,KI,KD3個參數進行優化使得模糊自整定PID控制器得到了改進,對液位控制取得了較好的控制效果,并且在入口端擾動加劇時通過仿真驗證了相比傳統PID控制器對液位控制效果的改進。
文中研究采用的是工程上常用的Z-N整定法,參數計算簡單易于得到。相比于理論計算取得的控制器參數,通過仿真驗證了經過優化和模糊自整定后控制器的效果反而更好,因而該法也便于在工程上實現和應用。目前在對提升GLCC分離效果的研究中,只是對液位單變量進行了控制改進,而忽略了GLCC分離裝置中壓力回路,在進一步的研究中應引入多變量控制回路,以使GLCC分離效果得到更好的改進。
[1] 寇杰.柱狀氣液旋流分離器的研究現狀及應用前景[J].石油機械,2006(04):71-73.
[2] 胡艷華,龍斌.小型柱式氣液旋流分離器在海洋平臺的應用前景分析[J].中國造船,2009(11):509-513.
[3] 寇杰,宮敬,曹學文.圓柱式氣液旋流分離器的性能評價[J].中國石油大學學報(自然科學版),2008(08):99-102.
[4] 仇晨,劉培林,尹豐,等.一種新型的高效節能GLCC分離器在中海油的應用研究[J].中國海洋平臺,2010(10):45-48.
[5] 王曉莉.GLCC多相流計量裝置[J].計量技術,2005(04):32-33.
[6] 王曉莉.GLCC多相流計量裝置用于單井計量[J].油氣田地面工程,2005(04):37.
[7] 方再新,王連海.GLCC多相流計量系統優化控制方案設計及工程實現[J].石油化工自動化,2008,44(01):5-7.
[8] WANG S.Dynamic Simulation,Experimental Investigation and Control System Design of Gas-liquid Cylindrical Cyclone Separators[D].The University of Tulsa,2000.
[9] 金以慧.過程控制[M].北京:清華大學出版社,1993.
[10] ZIEGLER J G,NICHOLS N B.Optimum Settings for Automatic Controllers[J].Trans on American Society of Mechanical Engineering,1942,64(08):759-768.
[11] HANG C C,ASTROM K J,HO W K.Refine-ments of the Ziegler Nichols Tuning Formula[J].IEE Proceedings Control Theory and Applications,1991(02):111-118.
[12] 劉金琨.先進PID控制及其Matlab仿真[M].北京:電子工業出版社,2004.
[13] 張德豐.Matlab自動控制系統設計[M].北京:機械工業出版社,2010.
[14] 魏巍.Maltab控制工程工具箱技術手冊[M].北京:國防工業出版社,2004.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
電子測試(2017年11期)2017-12-15 08:57:07
現代企業(2015年2期)2015-02-28 18:45:09
汽車維護與修理(2015年2期)2015-02-28 12:15:41
