電廠熱工智能控制系統的研究
2013-04-09 06:54:20崔師明范山東
機械制造與自動化 2013年1期
崔師明,范山東
(1.黑龍江林業高級技術學院,黑龍江 綏化 152061;2.黑龍江科技學院電氣與信息工程學院,黑龍江 哈爾濱 150027)
0 前言
電廠熱工是一個大滯后、非線性、時變的控制過程。為了在工業中更好的控制純滯后時變系統,不少學者基于內模控制結構,綜合各種控制(如模糊控制、自適應控制、神經網絡)的優點,提出了很多控制方法。而本文首先在總結2 自由度內模控制的調節方法和規律的基礎上,采用模型參考自適應控制的思想,將模糊控制方法和內模控制方法結合在一起,提出了一種模型參考模糊自適應內模控制方法:采用相消法設計內模控制器,用參考模型理想輸出和實際對象輸出之差e 及其變化率Δe 在線模糊調節控制器中濾波參數,目標是使系統輸出平穩快速[1]。仿真結果表明,這種方法可以使系統的性能達到快速性和魯棒性的最佳結合。然后,在總結前人對輸入受限問題的處理經驗的前提下,提出了一種限幅狀態與內模控制相互切換的方法。最后,把控制器濾波參數的模糊自整定和有輸出限幅的內模控制二者有機的結合起來,發揮各自的長處,形成在線智能切換的模型參考自適應內模控制方法,對由國內某500 MW 火電廠鍋爐一級減溫系統的實際階躍響應信號擬和出來的相應的一級減溫被控對象動態傳遞函數進行仿真,并與常規內模控制系統、PID 控制系統作各種性能比較[2]。仿真結果表明,采用本文提出的方法在系統響應的快速性、魯棒性和抗干擾方面都得到了較大改善,從而證明了方法的正確性和有效性。
本文綜合應用內模控制方法和模型參考自適應控制的思路,控制器的設計用內模結構的相消法設計,調節信號來自參考模型輸出與系統實際輸出的誤差及其變化率,采用模糊調節,目標是使系統輸出平穩快速[3]。系統結構如圖1 所示。

圖1 系統示意圖
1 控制量限幅的內模控制器
工業過程控制中,大部分控制量由于執行機構等的限制,控制信號的幅度和變化率都受到限制,若直接應用未考慮控制受限的控制器就相當于在系統中引入了非線性環節,性能將大幅度下降。為了解決該問題,在總結前人對輸入受限問題的處理經驗的前提下,提出了一種限幅狀態與內模控制其相互切換的方法,即根據系統響應是否在誤差帶范圍內及系統的模型預測輸出是否超過一該誤差帶,來共同確定控制量在限幅值與內模控制器輸出值之間進行在線智能切換[4]。采用智能控制器的系統結構圖如圖2 所示。
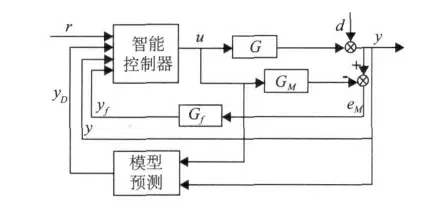
圖2 智能內模控制結構圖
如圖3,設y1和y2分別為系統實際響應誤差帶的下、上限,y1'和y2'分別為系統預測輸出的上、下限,y1,y2,y1',y2'均可在線調整;yp(k+L)為系統模型預測輸出值,其L 表示滯后步數。為嚴格限制控制量u,保證系統良好的響應速度及抗擾性,且系統響應不出現過大超調,對控制器的輸出采用分段計算的方法。即當系統響應小于y1且模型預測值也小于y1'時,用最大限幅值,以提高快速性;y(k)<y1且yp(k+L)<y1',按最大限幅值計算u(k);當系統響應大于y2且模型預測值也大于預測誤差帶y2'時,用最小限幅值;y(k)>y2且y(k +L)>y2',按最小限幅值計算u(k);其余時候就直接按式y=Gr×r +Gd×d=r計算控制量u(k)(圖3)。
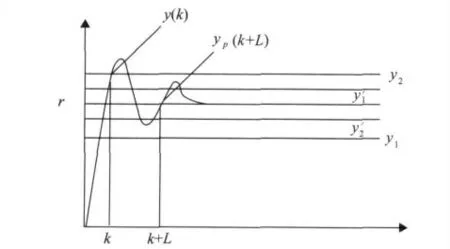
圖3 誤差帶示例
為驗證本方案的有效性,將本文方案與直接用常規內模控制器輸出加限幅相比。取常見的一階慣性對象加純滯后,即實際對象為:

采樣周期T=1 s,加零階保持器后離散化模型為:

控制量限幅值為0≤u(k)≤1.8,取α=0.4,β=0.7,參考信號r 為單位階躍信號,在仿真時間40 s 時加一幅值為0.5 的階躍擾動。
當模型精確時,智能控制系統對應參數為:y1=0.85,y2=1.1,y1'=1,y2'=0.88,響應如圖4 中實線所示,直接用常規內模控制器輸出加限幅時,系統響如圖4 中虛線所示。控制量均經系數為0.3 的變換后,表示在圖下方。
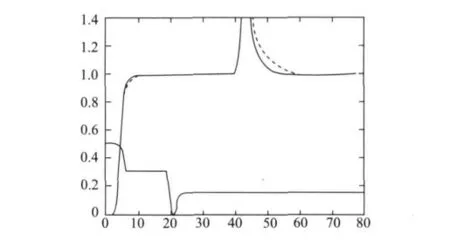
圖4 模型精確時的系統響應
當對象參數發生20%變化時,即實際對象為

本智能控制系統對應參數為:y1=0.8,y1'=0.95,y2=1.15,y2'=0.9.響應如圖5 中實線所示;直接用常規內模控制器輸出加限幅時,系統響應如圖5 中虛線所示。控制量均經系數為0.3 的變換后,表示在圖下方。以上仿真結果表明,本文方案在其響應速度、抗擾性及魯棒性等方面都有一定改善。
圖5 模型失配時的系統響應
2 模型預測的改進
考慮到實際對象中存在著時變或非線性等因素,或多或少的存在模型誤差,加上系統中的各種隨機干擾,使得預測模型不可能于實際對象的輸出完全一致。上一節所述方法的不足之處是,因為預測是基于模型,當模型失配越大,預測就越不準確,從而影響控制效果[5]。現舉例如下:
假定對象模型為:

采樣時間T=1 s,則其加零階保持器的離散化模型為:

當實際對象有模型失配時,實際對象變成了:

這時,對于單位階躍輸入,在T=40 s 時加一幅值為0.5 的階躍擾動,根據模型的預測結果如圖6 中點劃線所示。

圖6 模型失配時的系統預測和真實響應圖
圖6 中實線為實際輸出。從圖6 可以很清楚的看出,由于模型的失配,使得預測效果完全偏離系統的真實輸出。上述的預測都是完全基于其模型,實質上是開環的。在預測控制中,其最具生命力的三大特征之一便是反饋校正。借鑒其思路,也利用反饋校正來修正開環模型預測。具體的做法就是:將第k 步的實際對象輸出測量值y(k)與預測模型輸出ym(k)之間的誤差,加到模型的預測輸出ym(k+i)上,得到閉環輸出預測,用yp(k+i)表示:

其中:h 為修正誤差系數,em(k)為k 時刻預測模型輸出誤差。
由于系統存在純時延t,最開始em(k)(k=l,2,…,t+l)是0,到了t+l 時刻就會在預測值上突加一個em,對預測值有一定振蕩,為了減小這個影響,本文對h 取變參數,剛開始時取h<l,慢慢增加h,最終取h=1。上述模型失配系統的預測結果如圖7 點劃線所示。實線為實際輸出。圖7 改進后的預測輸出圖。根據上述改進預測輸出的思想,對上面的系統進行仿真。系統對象為:

圖7 改進后的預測輸出圖

而發生模型失配后,實際對象為:

仿真結果如圖8 中實線所示,點劃線為未加改進的模型預測所得響應曲線。控制量均經系數為0.3 的變換后,表示在圖下方。由圖8 和圖5 可以看出,利用改進后的帶反饋校正的模型預測代替簡單模型預測作為系統預測輸出,系統響應比改進前有更好的響應特性,從而驗證了本文方法的正確性和有效性[6]。

圖8 改進后有模型失配時的系統響應圖
3 仿真研究
在前面的章節里已經分別討論了控制器濾波參數的模糊自整定和有輸出限幅的內模控制問題,且分別作的仿真都己經證明了方法的正確性和有效性。本文把二者有機的結合起來,發揮各自的長處,形成在線智能切換的模型參考模糊自適應內模控制方法。結構框圖如圖9。

圖9 采用模糊調節器的自適應內模控制
為了驗證本文提出的該方法的有效性,用Matlab 對系統進行仿真,仿真框圖采用圖9 的結構,并將系統仿真結果與模型參考模糊自適應內模控制加限幅輸出方法進行比較。上圖中,G 為實際對象,GM為被控對象模型,Q是包含調節濾波參數和處理有控制限幅的智能控制器,F饋為反濾波器,R,D 和Y 分別代表參考輸入、擾動和輸出,M,e,e 和Δe 分別表示模型誤差、理想輸出和實際輸出之差e 及其變化率[7]。
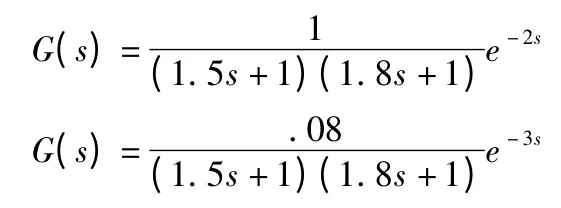
對象模型為工業過程中常見的二階慣性環節加純滯后

其中,T1=1.5,T2=1.8,K=1,τ=2 采樣周期為T=1 s,則其加零階保持器的離散化模型為:

被控對象分別取以下3 種形式(采樣周期T=0.5 s):
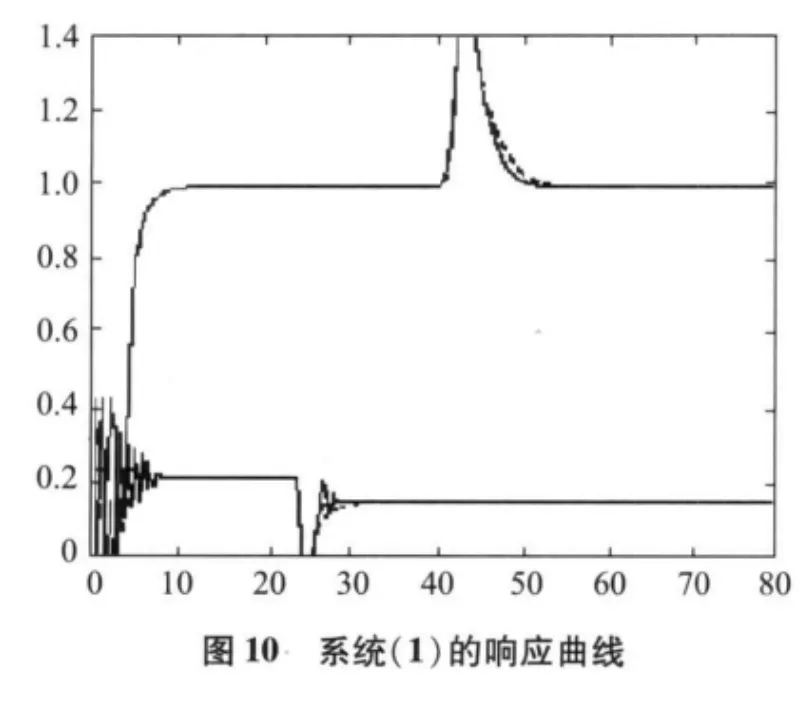
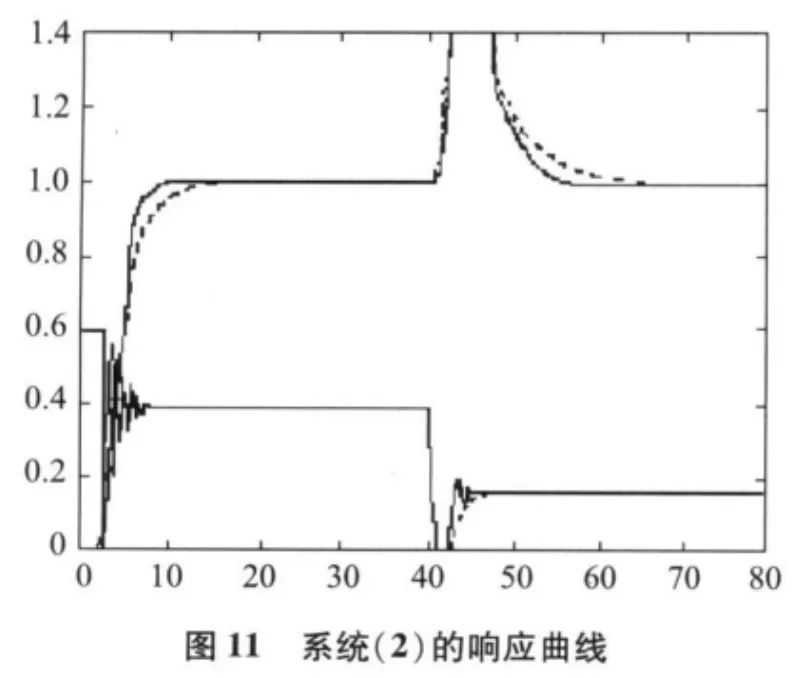
從仿真結果可以看出,無論有無模型誤差,采用本文提出的方法在系統響應的快速性、平穩性和魯棒性方面都得到了較大改善,從而證明了本文方法的正確性和有效性。

圖12 系統(3)的響應曲線
4 結論
在結合對輸入受限問題的處理經驗的前提下,本文根據系統響應是否在誤差帶范圍內及系統模型的預測輸出是否超過該誤差帶,來共同確定控制量在限幅值與內模控制器輸出值之間進行在線智能切換。其特點是:在線調節時,當滯后增大或者模型失配時,適當減小系統實際響應誤差帶和系統預測輸出的的上限,增大系統實際響應誤差帶和系統預測輸出的的下限,便可獲得較好的效果,該方法簡單實用,便于在線調節,具有一定的工程應用價值;另外,對模型失配較大情況下預測不準進行了討論,受預測控制的啟發,在模型預測中引入反饋校正,即根據k 時刻以及以前時刻的預測誤差對未來的模型預測值進行修正。使預測更加準確,從而更精確的決定控制狀態的切換和控制量的選取,使系統響應獲得更好的快速性、平穩性和抗擾性。仿真結果證明了本文方法的正確性和有效性。
[1]張玉鐸,王滿稼.熱工自動控制系統[M].北京:水利電力出版社,1984.
[2]Garcia C.E.,Morari,M.Intemal model control.2.Design procedure for multivariable systems.I&EC process Des.Dev.,1985,24(2):472-484.
[3]祝小蓮,等.一種有輸出限幅的智能內模控制器設計方法[J].昆明理工大學學報.2001,26(增刊):132-134.
[4]郭巨眾.模糊內模控制模糊內模控制及其在過熱汽溫控制中的應用[M].太原:太原理工大學,2003.
[5]李成鑫,趙耀.有控制輸出限幅的智能內模控制器的一種改進[J].貴州科學學報,2002,20(4):10-12.
[6]廖明,吳寧,謝品芳.神經網絡內模控制算法的研究[J].電氣傳動自動化,1998,20(4):24-28.
[7]范影樂,楊勝天,李軼.MATLAB 仿真應用詳解[M].北京:人民郵電出版社,2001.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34