基于融合算法的沉降監測數據反饋分析
2013-04-11 01:40:26李紅波
上海國土資源 2013年2期
李紅波
(中船勘察設計研究院有限公司,上海 200063)
基于融合算法的沉降監測數據反饋分析
李紅波
(中船勘察設計研究院有限公司,上海 200063)
沉降變形是安全監測的重要內容。基于分布式多源數據智能融合算法,具有良好的修正性和互補性,可解決傳感器測量范圍局限與失準及其數據誤差。某跨海大橋群樁基礎沉降監測的應用結果表明,該方法具有較高可靠性和識別精度,為安全監測與分析提供了新的有效手段。
沉降監測;數據處理;反饋分析;融合算法
近年來,隨著岸帶經濟圈的崛起,沿海工程迅速發展,而由于地質環境的復雜性,海上建筑物的基礎安全成為規劃、建設和管理必須面對與處置的重要問題。安全監測是反映其與海洋地質條件適應性的重要評價內容,健全和完善監測網絡系統、采用自動化監測技術、完善地質信息平臺、提高風險識別預警能力是重要途徑之一。
沉降變形監測是評價樁基礎的一項重要指標,但是海洋建筑物尤其是超大群樁基礎的沉降變化,受潮位、波浪、日照輻射等環境因素和偶然因素的影響,可導致觀測數據序列呈現異常過程,且這些環境因素不僅只影響某個測點,還會造成觀測系統出現異常群,從而嚴重干擾樁基礎工程特性的分析和預測。更重要的是,異常過程和異常群往往很難利用普通技術進行識別和剔除。此外,不同類型的傳感器,因其精度、安裝方式和埋設位置不同,而使數據及其噪聲的特性存在差異。故有必要采用信噪分離技術剝離各種噪聲的影響,并根據不同類型傳感器觀測結果的可信度和重要性,進行多傳感器數據融合。
對于監測數據降噪,國內外許多學者開展了大量研究,尤其是基于“軟計算”方法的修正數據得到廣泛應用。Mallat提出多分辨分析的概念,使小波具有帶通濾波特性,從而可以利用小波分解與重構的方法濾波降噪[1]。田勝利等利用小波去噪技術,對一組建筑物變形監測數據進行去噪處理,表明該方法能夠識別觀測噪聲和有用信息[2]。然而實測信號往往伴隨沖擊信號,從而限制了單一去噪方法的適用性。石雙忠等提出一種基于小波消噪時序分析改進法[3]。潘國榮等采用把小波變換與神經網絡有機結合的小波神經網絡法[4]。但小波神經網絡法還存在結構優化問題,其收斂速度、魯棒性和預測精度還有待進一步提高。
20 世紀60 年代初,Kalman 等提出遞推式濾波算法。它是一種對動態系統進行實時數據處理的有效方法,可實現對各種原始監測數據的異常干擾進行濾波處理,同時有效提高判定精度。何亮等通過采用離散Kalman 濾波估計和小波分析相結合的方法,建立了可應用于結構健康監測的離散時間動態模型[5]。王利等提出用Kalman 濾波法先對原始變形監測數據進行濾波處理,而后再建立GM 模型進行灰色預測,并用實例證實了該法的有效性[6]。但無論是數據降噪還是數據融合,在深水群樁基礎整體沉降分析中的應用研究仍較少見。
在多點監測中,傳統的分析方法往往集中在對某一個傳感器采集的數據進行分析判斷,這首先要求合理選取“關鍵點”,而該點的選取受人為影響因素較大;其次,該點是否具有代表性亦無法準確驗證,無法避免以偏概全;最后,該點的選取必須經過大量的現場工作和研究,但是受工程條件和時間限制,顯然不易完成。而采取多個指標分別進行評判,很難準確判斷出樁基的整體工作狀態,這是因為各個監測點受到的外界影響不一致,如日照、波浪、溫度和潮位條件等,容易引起分析系統出現紊亂,從而嚴重干擾樁基礎沉降量和橋基安全的綜合分析和預測。因此如何將各傳感器采集的數據進行綜合有效融合和提取,需要進一步研究[7,8]。
已有研究表明,分布式融合算法能夠有效融合監測數據[9],其中Kalman濾波算法是其核心技術,監測過程可視為對每一個傳感器運動軌跡的監測。根據量測值提取目標的綜合信息,實質是建立多個固定的狀態方程和量測方程來描述樁基沉降量,并對各監測點采集到的數據進行跟蹤濾波去噪,以獲得被監測對象的整體工程特性。
1 樁基沉降時間序列監測模型
為便于數學描述,對于每一個傳感器監測點,其沉降量可用下述方程組進行描述:
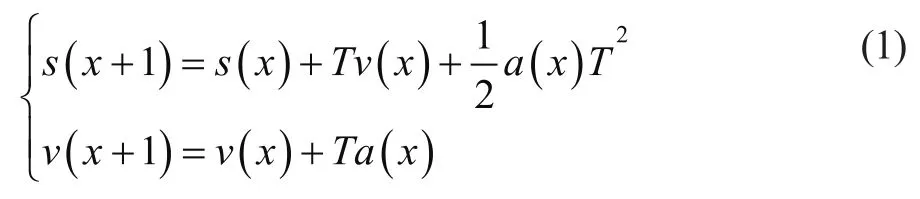
其中,a(x)表示監測點在x時刻到x+1時刻的加速度,v(x)表示樁基在x時刻的速度,s(x)表示樁基在x時刻的位置。a(x)是服從零均值、方差為Q的正態分布的噪聲序列,且a(x)和a(y)(x≠y) 互不相關,即,其中δ是克羅內克函數,其特性為k=1時,δ(k)=0;k=0時,δ(k)=1。
由以上分析可建立樁基在沉降階段的時間序列動態監測模型:

式中:
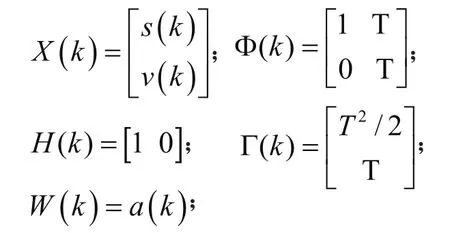
Z(k)為樁基的實際沉降量監測值,v(k)是均值為零、方差為Q的量測噪聲序列,且與W(k)不相關[10]。
2 分布式多傳感器數據融合
分布式多傳感器數據融合是一種決策級融合方法,通過一系列的數據關聯和互補,能夠最大限度地改正錯誤,使誤差達到最小,從而避免誤差延續造成結果不精確。在樁基的沉降量監測中,由于各個監測點在單位采樣時間內沉降量都是唯一的且反映了樁基的變形,因此各傳感器產生的沉降量是相關的,可采用有反饋信息結構的卡爾曼濾波進行融合計算。
有反饋信息的分布式融合結構[11],是指在數據處理前后均要進行卡爾曼濾波的修正,即有一個數據信息反饋溝通的過程,最后才能進行融合計算,融合計算方法如下[12]:

3 工程應用實例
3.1 工程概況
東部某跨海大橋8號索塔塔墩采用了“超深、大直徑、樁距與樁徑比小”的群樁基礎,由于該樁基礎位于海中,且屬于高樁,上部裸露于海水中,故在其中上部布設了不銹鋼護筒;同時考慮到地震影響及水平承載力提高的需求,鋼護筒通常被永久保留為樁基礎的受力結構。該結構的主要特征是受力復雜,外界影響因素較多,尤其是潮汐作用和復合群樁影響效應。由于自然條件限制,其量化影響程度無法精確計算出。為此,基于廣角度多源監測理念,開展了多項自動化原位跟蹤監測,內容包括壓力、軸力、承臺受力狀態、基樁彎曲變形、沉降量等, 由于監測位置及樁身材料不同,對沉降量的監測,采用了不同類型的傳感器。在該群樁基礎施工時期一共布置了10個自動化采集點,均布于最外側的樁身。觀測時間開始于樁基礎施工完成,并一直延續至今。由于日照、潮水沖刷等原因,2008年7月和2010年11月,分別有2個傳感器失效,始終處于正常工作狀態的有8個。近年來,該樁基沉降量出現了個別傳感器測量的沉降量有反復變化的現象,且傳感器間采集的數據有矛盾等值得關注的問題。
3.2 融合結果及分析
以2007~2012年樁基沉降量實測數據為研究對象,起始點選在2007年1月1日,并將其賦值為0,歷年12月31日與起始點的總差值作為數據融合前的值,建立樁基沉降量的時間序列,進行數據融合分析,以判斷整個超大群樁基礎的沉降值。
由2007~2012年間8號索塔各沉降傳感器采集的監測值可知(表1),該群樁基礎在監測時間內大部分傳感器采集的沉降量數據均隨時間推移有增大趨勢。自監測以來,最大沉降量發生在監測點S8-4,沉降量達81.9mm;最小沉降量發生在監測點S8-1,沉降量為62.5mm;年間最大沉降量變幅發生在2007~2008年的監測點S8-5,沉降量達41.2mm;年間最小沉降量變幅發生在2010~2011年的監測點S8-6,沉降量僅有2mm。但不難看出,S8-7在2007~2011年間,其沉降量隨時間有增大趨勢,但2011年間以來,卻發生了“回彈”;同樣,S8-8在2007~2010年間,沉降量為增大趨勢,但2010~2011年間也有“回彈”,而2011~2012年間又呈增大趨勢。同時,還有個別傳感器采集的數據具有“跳躍性”,具體表現在反復無規律的變化趨勢,即出現同一時期各個監測點的指標對樁基整體沉降的評價出現不一致的現象,如圖1所示。

表1 沉降量實測及融合處理值 (mm)Table 1 The actual measurement and the fusion value of subsidence
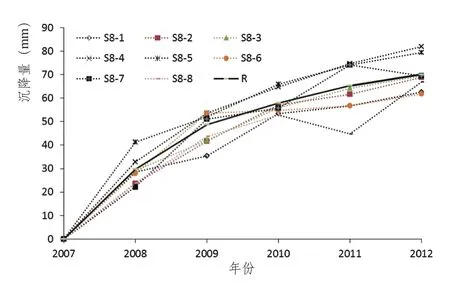
圖1 沉降量實測值與融合值變化曲線Fig.1 The changing curve of actual measurement and the fusion value of subsidence
分析此現象,其原因是由于采用的不同類型傳感器的精度存在偏差,加之傳感器分布位置也有差異,引起數據矛盾,進而引發數據間的冗余性[13]。為了消除這種矛盾性,根據傳感器分布特征,采用分布式多源數據融合處理方法進行融合,融合結果見表1。
對比圖表可知,融合后的數據首先消除了傳感器采集數據的矛盾性,可修正融合前數據的冗余性和不準確性,獲得了被測對象的一致性描述和解釋。采用具有反饋式融合方法后,去除了某些傳感器數據的反復無規律現象,在總體上降低了數據的矛盾性,這是因為每個傳感器的誤差是不相關的,融合處理后可抑制誤差。
其次,融合后的數據值處于各傳感器采集的數據之間,接近該時間內分布較多的數值,符合正態分布,這是因為研究對象為整個樁基平臺的沉降量,該融合方法具有良好的修正性和互補性。這種修正性和互補性,可以補償單一傳感器的不準確性和測量范圍的局限性,這樣也就糾正了數據誤差,消除了“回彈”現象,同時也改正了個別傳感器采集數據的“跳躍性”。
綜上所述,融合后的數據比原始采集數據的子集具有更優良的兼容性,即融合后的效果更加理想。融合后的值可以作為評價群樁基礎的“關鍵點”,其首先不受人為影響因素的控制;其次具有良好的代表性;最后,其不需要進行大量的現場試驗,能夠節省成本,降低風險。
就實際情況而言,樁基在投入使用時,對周圍環境有一個適應過程;大橋運行一段時間后,樁基才趨于穩定。其沉降量變化表現出一種由大變小的趨勢,顯然,融合后的數據更加符合這一規律。
4 結論
(1)分布式融合算法能夠有效融合大橋群樁基礎沉降量的監測數據,文中采用的卡爾曼濾波算法是其核心技術,監測過程可視為對每一個傳感器運動軌跡的監測,根據量測值提取目標的綜合信息,建立的多個固定的狀態方程和量測方程來描述樁基沉降量是可行的;對各監測點采集到的數據進行跟蹤濾波去噪是有效的,能夠獲得被監測對象的整體工程特性。證明基于卡爾曼濾波融合算法,可應用于大橋群樁樁基沉降監測數據綜合信息的提取。
(2)分布式融合算法,充分利用各個監測點采集的數據,獲得了被測對象的一致性描述和解釋,消除了融合前數據的矛盾性和冗余性,發揮了數據的互補性,而且符合一般工程特性和沉降量變化規律,結果較為理想。
(3)傳感器數量越多,越能提高系統的可靠性。一方面可以增加數據間的互補性,另一方面當某個或某幾個傳感器失效時,系統仍能正常運行。該融合方法還可以將河床沖刷、樁頂軸力、基樁軸力、樁底土壓力、承臺受力狀態、基樁彎曲變形等一系列不同類型的傳感器采集的數據進行綜合評判,應用面較廣。
References)
[1] Mallat S G. A theory for multiresolution signal decomposition: the wavelet representation[J].Pattern Analysis and Machine Intelligence, 1989,11(7):674-693.
[2] 田勝利,周擁軍,葛修潤,等. 基于小波分解的建筑物變形監測數據處理[J]. 巖石力學與工程學報,2004,23(15):2639-2642.
Tian S L, Zhou Y J, Ge X R, et al. Processing of monitoring data of building deformation based on wavelet transform[J].Chinese Journal of Rock Mechanics and Engineering, 2004,23(15):2639-2642.
[3] 石雙忠,岳東杰. 基于小波消噪技術的時序分析法用于GPS 監測數據處理[J]. 現代測繪,2006,29(4):17-19.
Shi S Z, Yue D J. Application of time-series analysis based on wavelet to GPS deformation monitoring data-processing[J].Modern Surveying and Mapping,2006,29(4):17-19.
[4] 潘國榮,谷川. 變形監測數據的小波神經網絡預測方法[J]. 大地測量與地球動力學,2007,27(4):47-50.
Pan G R, Gu C. Wavelet neural network prediction method of deformation monitoring data[J].Journal of Geodesy and Geodynamics,2007,27(4):47-50.
[5] 何亮,敖鵬,孫炳楠. 結構健康監測信息的多尺度分析[J]. 市政技術,2006,24(3):182-186.
He L, Ao P, Sun B N. Analysis of information in multiple measures for structure health monitoring[J].Municipal Engineering Technology, 2006,24(3):182-186.
[6] 王利,張勤,劉萬林. 基于卡爾曼濾波的GM 模型及其在公路邊坡變形預測中的應用[J]. 工程勘察,2007,(3):56-59.
Wang L, Zhang Q, Liu W L. Application of Kalman filter based on GM model to road slop deformation monitoring[J].Engineering Investigation,2007, (3):56-59.
[7] Hall D L. Mathematical techniques in multi sensor data fusion[M]. Artech House, London, 1992.
[8] Waltz E, Llinas J. Multisenser data fusion[M]. New York: Artech House, Inc., 1990.
[9] 蘇懷智,顧沖時,吳中如. 大壩工作性態的模糊可拓評估模型及應用[J]. 巖土力學,2006,27(12):2115-2121.
Su H Z, Gu C S, Wu Z R. Assessment model of dam behavior with fuzzy extension theory and its application[J].Rock and Soil Mechanics,2006,27(12):2115-2121.
[10] 涂國平,鄧群釗. 多傳感器數據的統計融合方法 [J]. 傳感器技術,2007,20(3),28-32.
Tu G P, Deng Q Z. A statistical method for the data fusion of multisensor[J].Journal of Transducer Technology,2007,20(3):28-32.
[11] 郭科,彭繼兵,許強,等. 滑坡多點數據融合中的多傳感器目標跟蹤技術應用[J]. 巖土力學,2006, 27(3):479-481.
Guo K, Peng J B, Xu Q, et al. Landslide multi-point multisensor data fusion target tracking technology[J].Rock and Soil Mechanics,2006,27(3):479-481.
[12] Singer R A, Sea R G, Housewright K. Derivation and evaluation of improved tracking filters for use in dense multi sensor environments[J].Information Theory,1974,20(4):423-432.
[13] Shalom B Y, Tse E. Tracking in a cluttered environment with Probabilistic data association[J].Automatic,2005,11(5):451-460.
Feedback Analysis of Subsidence Monitoring Based on Data Fusion Algorithm
LI Hong-Bo
(China Shipbuilding Industry Institute of the Engineering Investigation & Design Co, Ltd, Shanghai 200063, China)
Subsidence deformation is an important index of safety monitoring. The fusion algorithm with the distributed intelligent multi-source data can be the good correction and complementarity, and solve the sensor measuring range limitation and its misalignment and data error. The piles group foundation subsidence monitoring results from a bridge cross the sea show that it is a good method with higher reliability and recognition precision and provides a new effective measure for safety monitoring and analysis.
subsidence monitoring; data processing; feedback analysis; fusion algorithm
P229.5
A
2095-1329(2013)02-0084-04
10.3969/j.issn.2095-1329.2013.02.020
2013-05-27
2013-06-17
李紅波(1967-),女,高級工程師,主要從事巖土工程勘察與設計研究.
電子郵箱:lhb2150607@126.com
聯系電話:021-62548041×8663
猜你喜歡
建材發展導向(2022年14期)2022-08-19 02:10:40
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年6期)2021-06-09 05:56:46
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
城市道橋與防洪(2019年5期)2019-06-26 00:55:48
中國公路(2017年11期)2017-07-31 17:56:30
