三維激光掃描儀單點精度的檢驗與分析
2013-04-14 02:13:46韓三琪
鐵道勘察 2013年6期
韓三琪
(寧波市軌道交通集團有限公司,浙江寧波 315000)
1 概述
地面三維激光掃描技術是三維數據獲取與場景建模技術中最新的一種,興起于20世紀90年代。它采用高精度逆向三維建模及重構技術,以獲取研究目標的三維坐標數據和數碼照片的方式,快速獲取大型實體或實景等目標的三維立體信息,通過計算機重構其3D數據模型,再現客觀事物真實的形態特性[1]。該技術為快速獲取空間數據提供了有效手段,是繼GPS技術以后的又一項測繪技術新突破。
由于激光掃描儀問世時間短,而且結構復雜,現有的測繪儀器檢驗方法無法直接用來檢定地面激光掃描儀,因此儀器的性能,數據的質量和可靠性以及最終輸出產品的質量和精度就無法完全保證,這對于儀器應用領域的拓展是個阻礙[2]。盡管很多的儀器廠商給出了儀器的一些性能指標,但由于沒有統一的規格標準,這些指標并不一致,這讓用戶在選擇儀器時有諸多不便。此外,儀器廠商給出的性能指標都是在理想實驗環境下得到的,在實際工程應用中很難檢驗,從而導致無法了解儀器的真實性能。因此,需要對儀器的測量精度做進一步研究實驗。此外,一些涉及到單點精度的研究更多是利用掃描儀易識別的反光片進行試驗,與實際應用中的一般掃描對象存在較大差別,從而導致試驗的數據與實際不符[3]。
利用與實際應用中反光強度相當的紙片代替反光片進行掃描試驗[4],將掃描儀的單點定位坐標數據和同等條件下全站儀觀測到的靶標數據進行比較,以全站儀取得的點位坐標為基準,檢驗掃描儀在這種常規測量中單點定位的精度。主要工作如下:
(1)設計實驗方案,獲得地面三維激光掃描儀和相同條件下全站儀的測量數據。
(2)實驗數據分析,通過坐標轉換將全站儀和掃描儀的坐標轉換到同一個坐標系中,從掃描儀得到的點云數據中提取出每一個靶標的靶心坐標,并與轉換后的全站儀坐標進行對比,評定地面三維激光掃描儀的單點定位精度。
2 地面三維激光掃描儀檢驗試驗與數據處理
2.1 試驗目的
檢測試驗目的是通過設計合理的方案將地面三維激光掃描儀測量得到的坐標數據與相同條件下全站儀的測量結果進行比較,以全站儀的測量數據為基準,對地面三維激光掃描儀的單點測量精度進行試驗與分析。本文實驗以距離為10 m的單點測量為例,研究三維激光掃描儀的測量單點精度。
2.2 試驗場地
本次試驗在某大學試驗場中進行,試驗場內光線良好,室溫約為25 ℃。試驗場地各條件穩定,試驗時無人員走動。
2.3 實驗設備
以RIEGL公司VZ-400地面三維激光掃描儀為例,其參數指標如表1、表2所示。
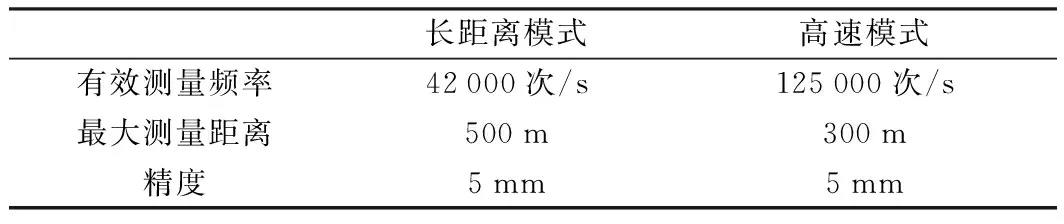
表1 VZ-400地面三維激光掃描儀的基本參數指標
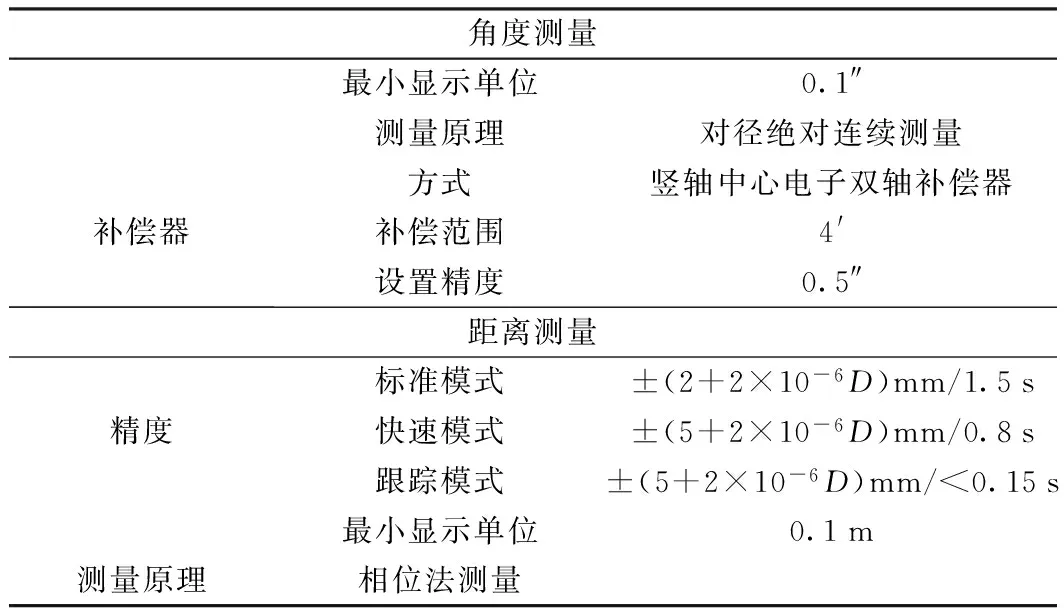
表2 Leica 1202全站儀基本參數指標
2.4 實驗步驟
(1)在試驗場掃描儀對面及兩側垂直墻面上貼上6個反光片作為靶標,用于后期全站儀和地面三維激光掃描儀的坐標轉化基準點。6個反光片均勻分布,反光情況良好。
(2)在一塊表面光滑,顏色略深的平板上布設12個靶標點,其中四個角的靶標點用反光片,其他的靶標點用自制的白色紙片代替,靶標點在平板上分布均勻。
(3)將制作好的上述平板置于三維激光掃描儀的正前方墻面處,靠墻擺正并固定好。要保證平板上的每一個靶標都能被地面三維激光掃描儀掃描到,且成像良好。同時,平板應置于步驟1的6個坐標轉化基準點中央,保證坐標轉化數據的可靠性。
(4)在離平板正前方約8 m處架設地面三維激光掃描儀,接通電源,開機預熱并對中整平,用數據線連接計算機,利用掃描儀自帶的Riscan Pro 軟件控制整個掃描過程。
(5)全站儀測量:在地面三維激光掃描儀旁邊架設全站儀,對中整平,對平板上的12個靶標點以及墻面上的6個基準點進行觀測,盤左盤右各觀測一次,在手簿上記錄下18個點的靶心坐標。
(6)核對地面三維激光掃描儀和全站儀的測量結果。
2.5 數據處理與分析
(1)坐標轉換
坐標轉化采取七參數法,利用掃描儀和全站儀得到的4個反光片基準點的坐標,求出七個參數的值,進而利用七參數模型將8個目標點的坐標轉化到同一坐標系中。
(2)靶心坐標提取
靶心坐標提取原理如圖1,已知點為實驗平板上四周的四個坐標轉換基準點,未知點為需要確定靶心坐標的白紙片。靶心坐標的確定:根據最小二乘原理,將未知點的約300個坐標數據依次計算與四個已知點的距離平方,最后得到四個距離平方和,將這個平方和與同樣方法計算得到的全站儀測得坐標的平方和相減后求出其差之和,取和的值最小的點坐標作為掃描儀掃描得到的靶心[3],其坐標公式如下

(1)
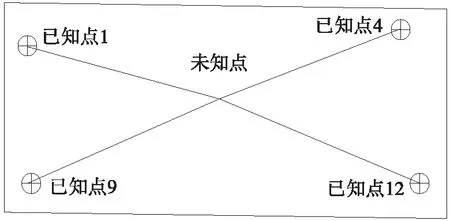
圖1 靶心坐標提取原理示意
(3)靶心坐標改正
計算得到的靶心坐標與實際值有偏差,在與全站儀做對比之前需要對其進行坐標改正,以消除系統誤差帶來的影響。
實驗得到的數據經過坐標轉換、靶心坐標的提取之后,得到坐標如表3所示。
由于X、Y、Z坐標差均在一個固定的數值附近,特別是Z坐標很明顯,考慮到可能存在較為明顯系統誤差,于是嘗試進行坐標改正。根據改正數ΔX、ΔY、ΔZ,取改正數ΔX=0.002 m,ΔY=0.004 m,ΔZ=0.079 m,則改正后的靶心坐標如表4所示。
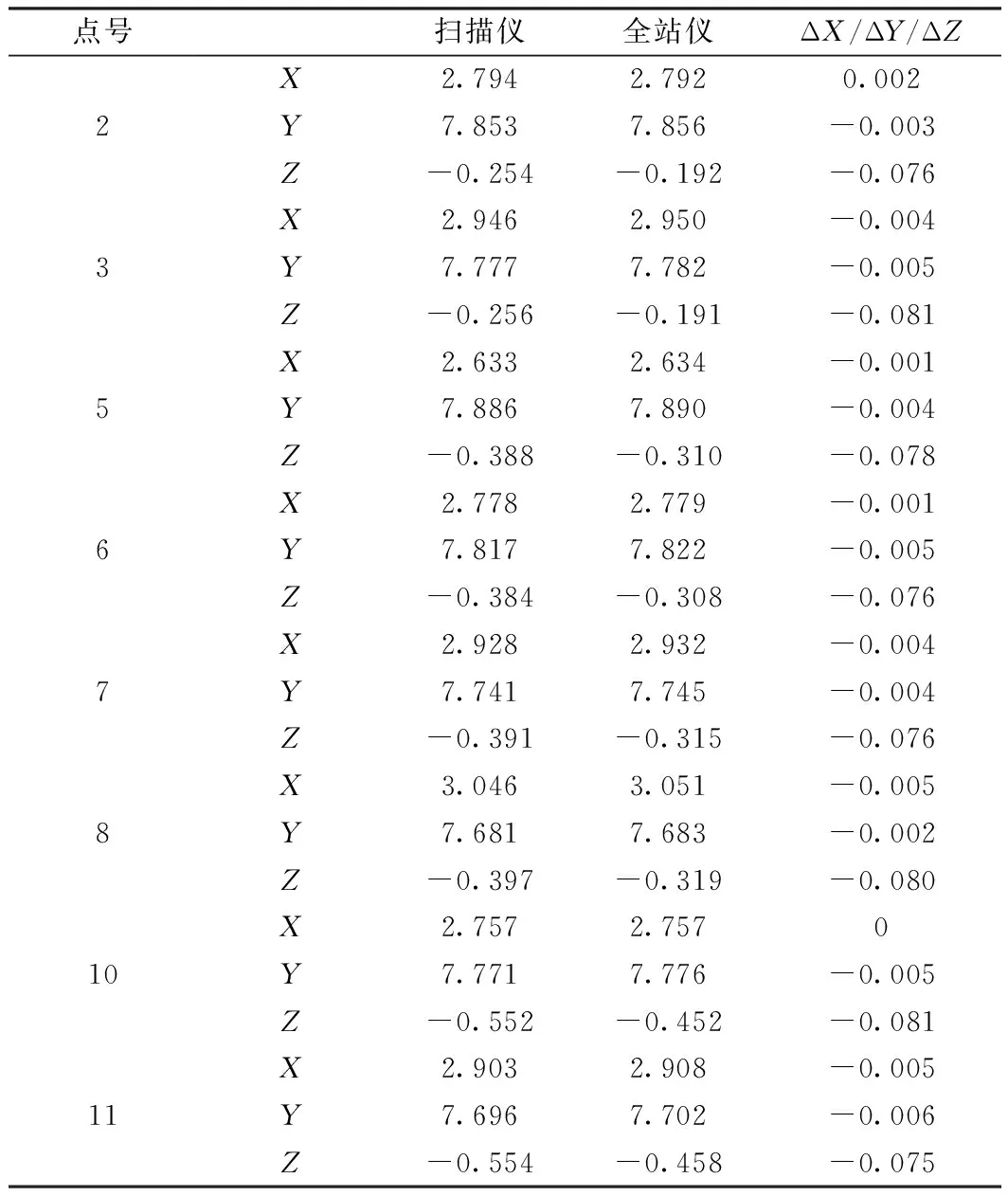
表3 掃描儀和全站儀測量的靶心坐標 m
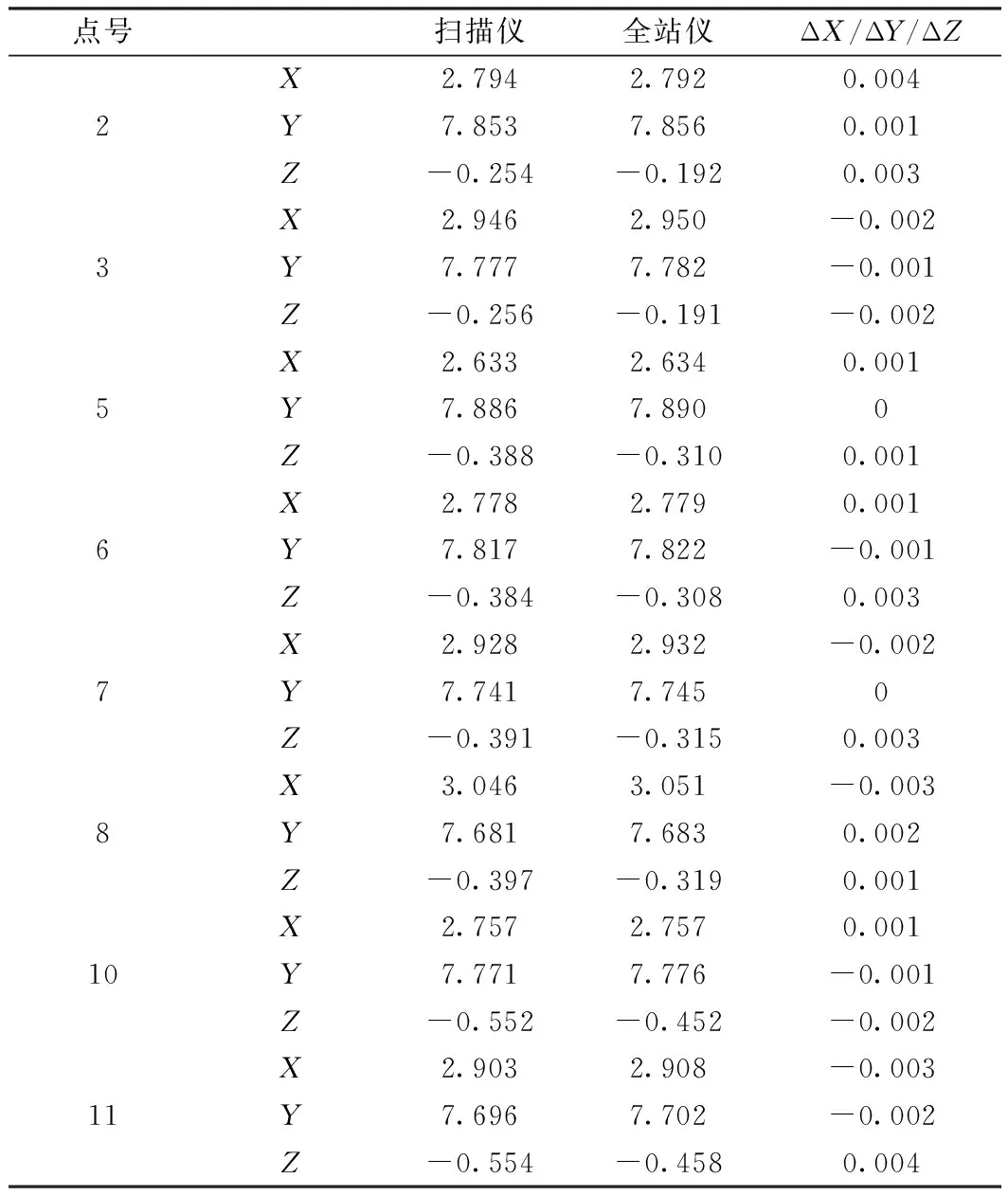
表4 改正后的靶心坐標差 m
(4)精度評定
從上面數據可以看出,經改正后的XYZ三項坐標差值均在4 mm以內,計算其中誤差
距離中誤差為
從以上計算可以看出,每個點的三維坐標差在4 mm以內,在三維激光掃描儀的標稱精度范圍內(5 mm),且三維坐標的中誤差均小于標稱精度,達到了實驗的目的。
3 結束語
圍繞地面三維激光掃描儀的精度進行檢驗試驗與分析,設計了較為合理的實驗方案,通過RIEGL公司的VZ-400地面三維激光掃描儀和Leica公司的 1202 型全站儀在相同條件下對同一批靶標進行測量,在經過坐標轉化后,以全站儀的坐標數據為準,比較三維激光掃描儀的坐標測量精度。
通過計算兩者的坐標差可以看出,在消除系統誤差產生的影響之后,地面三維激光掃描儀的測量精度在測量距離為10 m左右時,可以達到4 mm以內,坐標中誤差可以控制在3 mm以內。證明了三維激光掃描儀的在此距離測量情況下,單點精度與其標稱精度相差不大。同理,運用本文的方法,可以在不同距離,不同角度等環境下對三維激光掃描儀的單點掃描精度進行評定,為實際生產中提供精度參考。
[1]官云蘭.地面三維激光掃描儀數據處理中的若干問題研究[D].上海:同濟大學土木工程學院,2008
[2]馬力廣.地面三維激光掃描儀的分類與應用[J].地理空間信息,2005,3(3):34-36
[3]徐進軍. 地面三維激光掃描儀應用綜述[J].工程勘察,2008,22(3):26-27
[4]鄭炎兵,陳志揚.地面三維激光掃描儀的應用[R].廣州:廣州勘察設計研究院,2008
[5]劉春,張蘊靈,吳杭彬. 地面三維激光掃描儀的檢校與精度評估[J].測繪通報,2011(4)
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
