基于輸入輸出線性化的航跡滑模控制及仿真
2013-04-28 07:11:32吳瑤吳漢松袁雷
船電技術(shù) 2013年1期
關(guān)鍵詞:船舶設(shè)計(jì)
吳瑤,吳漢松,袁雷
?
基于輸入輸出線性化的航跡滑模控制及仿真
吳瑤,吳漢松,袁雷
(海軍工程大學(xué),武漢 430033)
針對(duì)船舶航跡控制系統(tǒng)的非線性及易受外部干擾的特點(diǎn),提出了一種基于輸入輸出線性化的航跡滑模控制策略。通過定義輸出變量將非線性航跡控制系統(tǒng)轉(zhuǎn)化為線性系統(tǒng),然后采用指數(shù)趨近律的滑模控制方法設(shè)計(jì)控制器,使得設(shè)計(jì)的非線性控制律直觀簡(jiǎn)潔,魯棒性好。通過SIMULINK仿真驗(yàn)證了該算法的有效性。
非線性 船舶航跡控制 輸入輸出線性化 滑模變結(jié)構(gòu)控制
0 引言
隨著人們對(duì)海洋資源的開發(fā)和利用,作為海上運(yùn)輸工具的船舶向大型化和高速化方向發(fā)展,海上交通密度的不斷加大,航行安全越來(lái)越受到威脅[1],常規(guī)的航向自動(dòng)舵因不能直接實(shí)現(xiàn)航跡偏差的控制,已漸漸不能滿足要求。隨著全球定位系統(tǒng)(GPS)等先進(jìn)導(dǎo)航設(shè)備在船舶上的應(yīng)用,人們開始設(shè)計(jì)精確的航跡自動(dòng)舵來(lái)保證船舶行駛在給定航線上。
目前船舶航跡控制的算法研究取得了一定的成果。文獻(xiàn)[2-3]通過應(yīng)用不同的控制方法設(shè)計(jì)局部指數(shù)鎮(zhèn)定的控制律,但前提要求艏搖角速度不為零。文獻(xiàn)[4-5]通過定義不同的輸出變量,提出了船舶直線航跡控制系統(tǒng)全局漸近穩(wěn)定的充分條件,將非線性系統(tǒng)線性化設(shè)計(jì)控制器,克服了艏搖角速度不能為零的局限但在外界干擾的影響下魯棒性差。文獻(xiàn)[6-7]采用反步法和其他算法結(jié)合的方法使控制律的設(shè)計(jì),抗干擾能力強(qiáng),但控制器設(shè)計(jì)過程復(fù)雜。
本文通過采用輸入輸出線性化的方法將航跡控制的非線性數(shù)學(xué)模型線性化來(lái)解決航跡控制中的非線性問題,然后利用滑模控制魯棒性強(qiáng)的優(yōu)點(diǎn)設(shè)計(jì)滑模變結(jié)構(gòu)控制器。并考慮風(fēng)、浪、流等外界干擾對(duì)某實(shí)習(xí)船進(jìn)行仿真分析,設(shè)計(jì)過程簡(jiǎn)單,魯棒性好,仿真結(jié)果驗(yàn)證了本文控制算法的有效性。
1 船舶航跡控制的數(shù)學(xué)模型
圖1為船舶航跡控制坐標(biāo)示意圖,其中x,y是船舶重心相對(duì)于固定坐標(biāo)系XOY的坐標(biāo)。
船舶航跡控制的數(shù)學(xué)模型可用以下非線性狀態(tài)方程表示[5]:
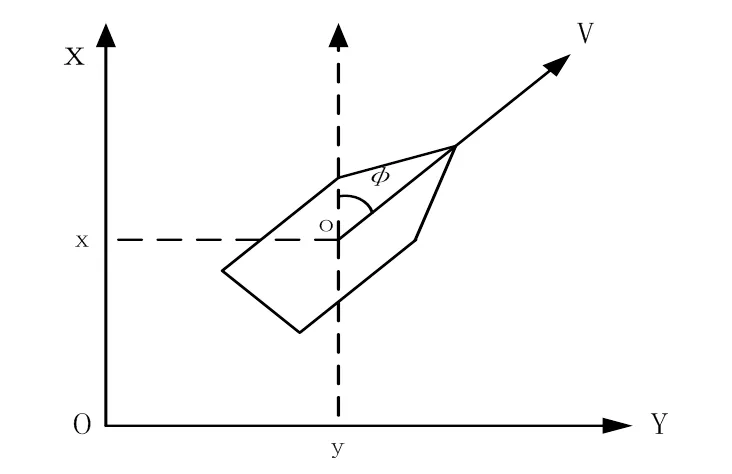
圖1 船舶航跡控制坐標(biāo)
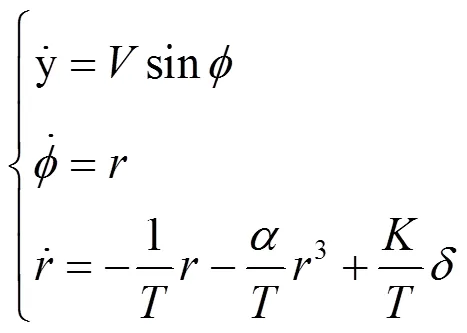
式中,為船舶橫向位移,為航向角,為船舶前進(jìn)速度,為艏搖角速度,為船舶控制舵角,由船舶的方型系數(shù)、噸位、載重及航速等因素決定。
若設(shè)定直線航跡與正北方向重合,則艏偏角就等于航向角,航跡控制就轉(zhuǎn)化為控制船舶橫向位移及航向角使其為零。
2 控制器的設(shè)計(jì)
2.1 航跡控制輸入輸出線性化

1) 定義輸出變量全局漸進(jìn)收斂于零;
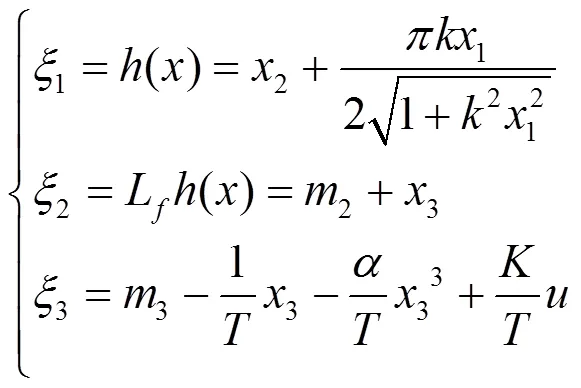
從而系統(tǒng)的非線性狀態(tài)空間方程為:
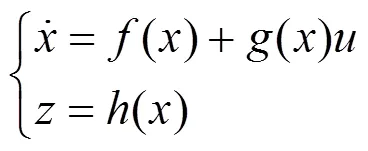
其中
對(duì)m求時(shí)間導(dǎo)數(shù)有
對(duì)m求時(shí)間導(dǎo)數(shù)有
(4)
求以下李導(dǎo)數(shù)

由式(7)知系統(tǒng)相對(duì)階為2,求得狀態(tài)方程的反饋控制律為:

取坐標(biāo)變換
將式(8)代入式(9)得線性化后的系統(tǒng)狀態(tài)方程:
2.2 滑模變結(jié)構(gòu)控制器設(shè)計(jì)
通過輸入輸出線性化及微分同胚坐標(biāo)變換,船舶航跡的非線性數(shù)學(xué)模型轉(zhuǎn)換為線性狀態(tài)方程,從而將非線性控制問題轉(zhuǎn)換為線性控制問題,為減小干擾對(duì)船舶控制的影響,要求船舶自動(dòng)舵具有較強(qiáng)的魯棒性,應(yīng)用滑模控制對(duì)內(nèi)部參數(shù)的變動(dòng)和外部擾動(dòng)作用具有的不變性,可以設(shè)計(jì)強(qiáng)魯棒性的控制器。
圖2為輸入輸出線性化變結(jié)構(gòu)滑模控制方塊圖,其中δ為等效舵角干擾。線性化之后系統(tǒng)以為輸入,以ξ為輸出,ξ為船舶橫偏位移的函數(shù),只要ξ漸進(jìn)收斂則能保證橫偏位移收斂。
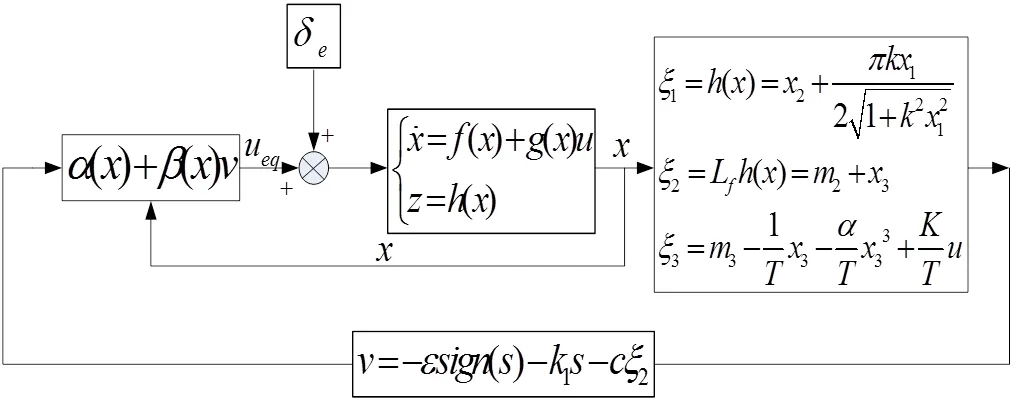
圖2 輸入輸出線性化變結(jié)構(gòu)滑模控制方塊圖
其滑模變結(jié)構(gòu)控制過程由兩部分組成,(1)到達(dá)階段,要保證切換面=0以外的相軌線在有限時(shí)間內(nèi)到達(dá)切換面,即系統(tǒng)的可達(dá)性。(2)切換面是滑動(dòng)模態(tài)區(qū),且滑動(dòng)運(yùn)動(dòng)漸近穩(wěn)定,動(dòng)態(tài)品質(zhì)良好[8]。
2.2.1滑模面設(shè)計(jì)
經(jīng)過線性化的航跡控制系統(tǒng)的狀態(tài)空間方程如式(10),設(shè)期望輸出為ξ,定義
設(shè)滑模面為
2.2.2設(shè)計(jì)控制律
能夠趨近并到達(dá)切換面的條件為
但本條件并不能反映運(yùn)動(dòng)是如何趨近切換面的,不能保證趨近過程良好的品質(zhì),因此采用趨近律的方法來(lái)設(shè)計(jì)控制。
取指數(shù)趨近律:

其中,k為大于零的常數(shù),減小,增大k可使趨近律加快,抖振削弱[9]。
設(shè)李亞普諾夫函數(shù):
從而:
從而證明了整個(gè)控制系統(tǒng)在李亞普諾夫意義下漸進(jìn)穩(wěn)定。
聯(lián)立式(12)和(14)得

將式(17)代入(8)可得最終反饋控制律為
式中和k的值通過仿真調(diào)試得出。
3 仿真研究
以文獻(xiàn)[10]中實(shí)習(xí)船為例進(jìn)行仿真設(shè)計(jì)。仿真參數(shù)如下:船長(zhǎng)為126 m,船寬為20.8 m,滿載吃水為8.0 m,方型系數(shù)為0.681,船速為7.7 m/s.通過計(jì)算得= 0.478,=216, 取=30; 采用基于輸入輸出線性化的滑模控制律式(18),選取輸出變量參數(shù)=0.0017,滑模面參數(shù)為=0.08;=5*10-7;k=0.02。
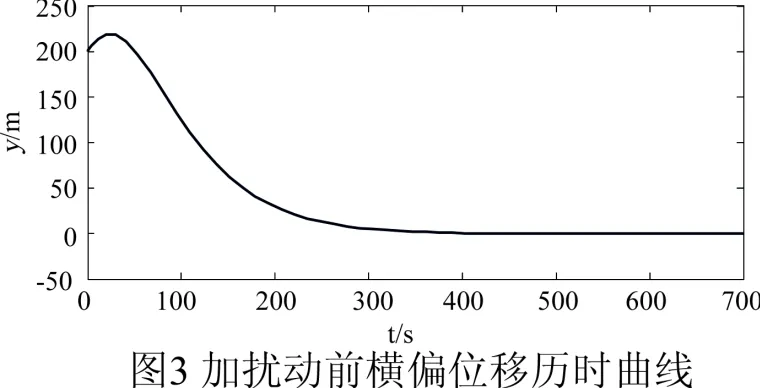
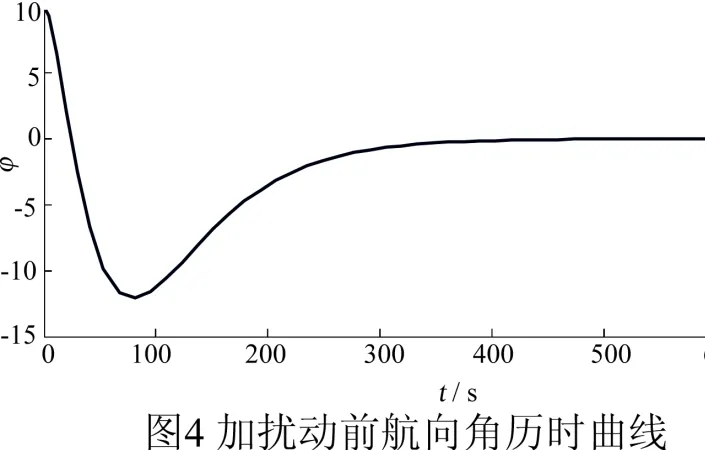
圖3-8表明,本文提出的基于輸入輸出線性化的航跡滑模算法可以使船舶的航跡偏差以指數(shù)速度漸進(jìn)收斂到零點(diǎn)的一個(gè)較小臨域內(nèi),在加入干擾后仍能保持良好的控制效果,體現(xiàn)出了強(qiáng)魯棒性。

4 結(jié)語(yǔ)
針對(duì)船舶直線航跡控制的非線性數(shù)學(xué)模型,本文在文獻(xiàn)[5]基礎(chǔ)上重新定義輸出,將非線性模型線性化,并加入滑模變結(jié)構(gòu)控制,設(shè)計(jì)的控制器能夠克服艏搖角速度不為零的局限,同時(shí)對(duì)內(nèi)部參數(shù)變動(dòng)及外部擾動(dòng)具有較好的魯棒性,仿真結(jié)果表明,設(shè)計(jì)的控制器可以快速使船舶穩(wěn)定在設(shè)定航跡上,控制輸入合理有效,調(diào)節(jié)參數(shù)較少,計(jì)算簡(jiǎn)單,有一定的實(shí)用意義,但加入擾動(dòng)后控制輸入抖振明顯,有待進(jìn)一步研究。
[1] 李麗娜.航海自動(dòng)化[M].人民交通出版社,2000, (1):55-76.
[2] Godhhavn J M, Fossen T I, Berge S P. Nonlinear and adaptive back-stepping designs for tracking control of ships[J]. Int. J. Adapt. Control Signal Processing, 1998, 12(8): 649-670.
[3] Pettersen K Y, Nijmeijer H. Under actuated ship tracking control: Theory and Experiments [J]. Int. J. Control, 2001, 74(14): 1435-1446.
[4] 周崗,姚瓊薈,陳永冰等. 不完全驅(qū)動(dòng)船舶直線航跡控制穩(wěn)定性研究[J]. 自動(dòng)化學(xué)報(bào),2007, 33(4): 376-384.
[5] 周崗, 姚瓊薈, 陳永冰等.基于輸入輸出線性化的船舶全局直線航跡控制[J]. 控制理論與應(yīng)用,2007, 24(1):117-121.
[6] 潘永平,黃道平,孫宗海. 欠驅(qū)動(dòng)船舶航跡Backstepping自適應(yīng)模糊控制[J]. 控制理論與應(yīng)用,2011, 28(7):907-914.
[7] 李長(zhǎng)喜,馮遠(yuǎn)靜,俞立. 基于Backstepping方法的不完全驅(qū)動(dòng)船舶直線航跡控制的設(shè)計(jì)[J]. 船舶工程,2008, 30(4):64-66.
[8] 高為炳.變結(jié)構(gòu)控制理論基礎(chǔ)[M].北京:中國(guó)科學(xué)技術(shù)出版社,1996:26-27.
[9] 姚瓊薈,黃繼起,吳漢松.變結(jié)構(gòu)控制系統(tǒng)[M].重慶:重慶大學(xué)出版社, 1997.
[10] 袁雷,宋立忠.模糊滑模控制在船舶航向非線性系統(tǒng)中的應(yīng)用[J].中國(guó)航海,2010, 33(1):61-64.
Sliding-mode Controllers for Ship’s Track-keeping Control Systems Based on Input-output Linearization
Wu Yao, Wu Hansong,Yuan Lei
(Naval University of Engineering, Wuhan 430033, Hubei, China)
TP11
A
1003-4862(2013)01-0004-04
2012-05-03
吳瑤(1989-),男,講師。研究方向:船舶非線性控制。
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國(guó)船檢(2017年3期)2017-05-18 11:33:09