
以單片機AT89C51為控制核心的智能電動車的硬件設計
2013-04-29 00:44:03方瑋
中國新通信 2013年8期
方瑋
【摘要】 以單片機AT89C51作為智能電動車的控制核心,利用H型PWM電路來控制電動機運轉方向從而控制小車的行使軌跡;通過金屬探測傳感器探測金屬,并發出聲光報警;通過光電傳感器來檢測障礙物,有效避開障礙物。
【關鍵詞】 單片機AT89C51 PWM光電檢測傳感器 金屬探測傳感器
一、設計方案
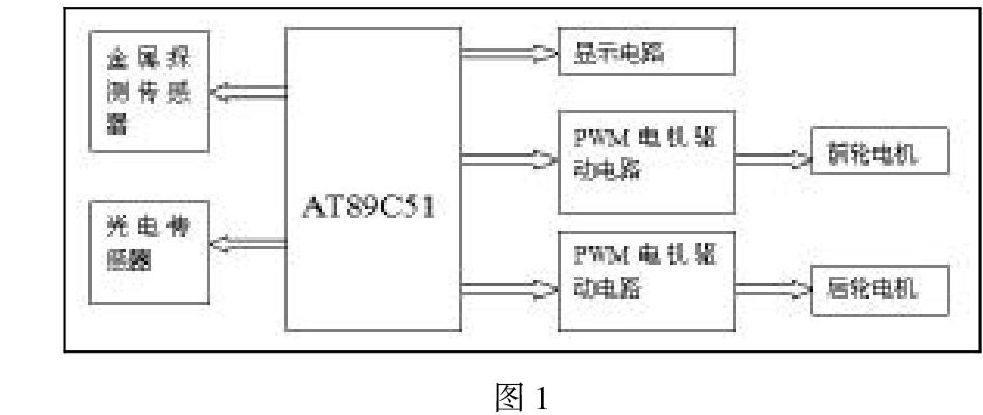
如圖1所示,以單片機AT89C51為核心部分控制器件,利用金屬探測傳感器來對金屬片的探測,利用光電傳感器對障礙物的檢測,用H型PWM電路來完成對電機的正反轉,來控制小車的前進后退與方向的改變。
二、硬件電路的設計
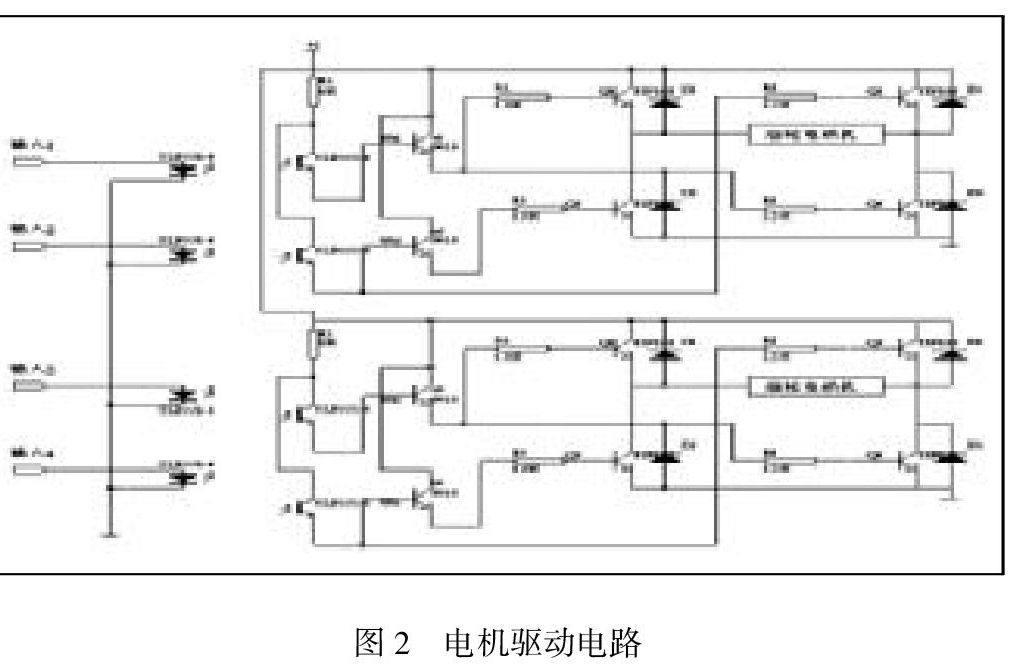
1.電機驅動電路的設計
采用兩個H型PWM驅動電路。當Ub1為高電平,Ub2為低電平時,Q1、Q4管導通,Q2、Q3管截止,電動機正轉;當Ub1為低電平,Ub2高電平時,Q1、Q4管截止, Q2、Q3管導通,電動機反轉。四個二極管可以在Ub1由高變低時,通過D2、D3兩個二極管形成電動機電壓回路。控制系統電源為6V,運用了TLP521-4光耦集成塊,改善驅動電流。電路如圖2所示。
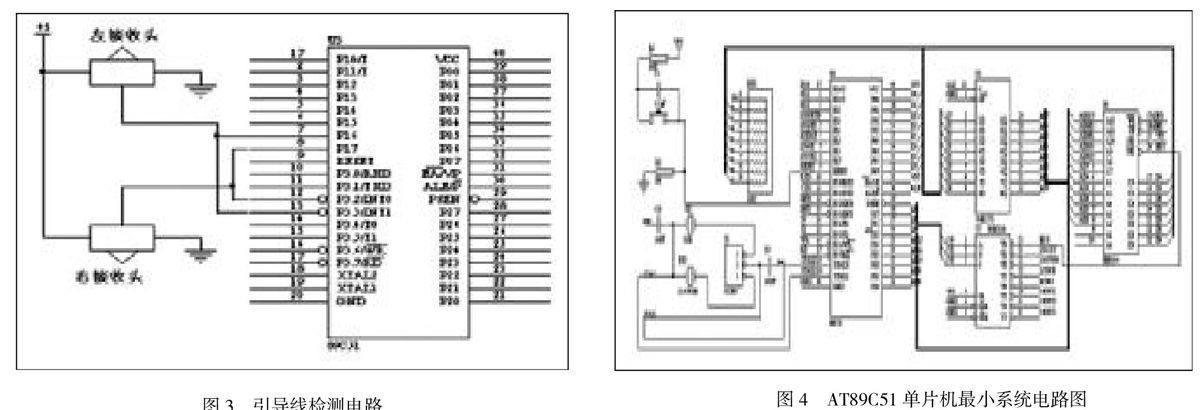
2.矯正行使方向電路的設計
為使小車沿著引導線行使,在小車的底部安裝了兩個收發一體化的紅外傳感器。當小車發生向左發生偏轉時,右邊的紅外線傳感器就會接收到信號,向CPU申請中斷,CPU將控制前輪電機實現向右轉彎矯正;當小車發生向右發生偏轉時,左邊的紅外線傳感器就會接收到信號,向CPU申請中斷,CPU將控制前輪電機實現向左轉彎矯正。電路如圖3所示。
3.單片機最小系統的設計。(1)AT89C51單片機最小系統采用AT89C51單片機與74LS373組成單片機的基本系統,對P2口的P2.5 P2.6和P2.7經74LS138地址譯碼器后作為INTEL8279的片選信號,P1口分別來控制前后電機的正反轉和驅動報警電路以及傳感器的收發電路。電路如圖4所示。(2)顯示電路的設計 。采用INTEL8279專用芯片,實現鍵盤輸入和LED顯示控制兩種功能。電路如圖5所示。
4.探測電路的設計的設計。(1)紅外線傳感器 采用兩個收發一體化紅外線傳感器,對引導線的檢測,使小車正確的按照引導線行使。(2)金屬的探測 安裝在小車的底部金屬探測傳感器探測到有金屬的時候向CPU申請中斷,使單片機對外發出聲光報警的同時讓數碼進行顯示所探測到金屬的數據。(3)光電傳感器 安裝在小車的前部光電傳感,當有障礙物時光電傳感器輸出底電平向CPU申請中斷,CPU又通過P1口來控制電機的正反轉。從而使小車避開障礙物。
5.報警電路的設計
利用音樂芯片和功放電路兩部分來完成的。當CPU的P1.4口連續的輸出高電平時,音樂芯片就開始輸出樂曲信號,經功放電路開始報警。
三、結束語
該電路利用了PWM技術來解決了電機驅動,利用光電耦TLP521-4解決單片機與電機之間的隔離,使電機的驅動電流得到了有效改善;充分利用了AT89C51的強大功能,實現了對金屬可靠的探測、智能化的路線檢測等功能。
參 考 文 獻
[1] 《數字電子技術》:江曉安編,西安電子科技大學出版社出版
[2] 《模擬電子技術》:江曉安編,西安電子科技大學出版社出版
[3] 《高性能模/數與數/模轉換器件》:劉書明 劉斌編著,西安電子科技大學出版社出版
[4] 《單片機原理及應用》:張偉主編,機械工業出版社出版
[5] 《單片機中級教程》:何立明主編,北京航空航天大學出版社出版
