高鐵車載ATPATP制動控車模式曲線計算方法的研究
2013-05-08 09:08:24衛和君
鐵路通信信號工程技術 2013年1期
衛和君
(北京全路通信信號研究設計院有限公司,北京 100073)

衛和君,男,畢業于長沙鐵道學院,高級工程師,專業設計部經理。主要研究方向包括信號系統運輸能力分析與計算,曾參與既有線提速綜合檢測技術的試驗研究—時速200公里動車組追蹤間隔時間的研究及檢算,列車牽引計算與閉塞分區劃分CAD軟件開發,中國鐵路提速工程成套技術與裝備、武廣客運專線、京滬高速鐵路等工程設計等項目。
近年來,我國高速鐵路的建設處于高速發展階段,為了確保高速列車的運行安全,CTCS-3級和CTCS-2級列控系統被廣泛運用于我國客運專線上。在這些列控系統中,確保高鐵運行安全的關鍵技術是車載ATP制動控車模式曲線的計算模型。它設計的好壞直接關系到列車運行安全和效率,所以它是車載ATP設備廠家和運營部門關注的焦點,也是車載ATP設備的核心技術。
1 現狀
我國高鐵線路上,目前CTCS-3級列控系統車載型號有300T、300S和300H。300T型由通號院有限公司與龐巴迪公司聯合研發制造;300S型和300H型分別由意大利安薩爾多公司和日本日立公司聯合和利時集團研發制造。為了使車載計算機快速計算不同坡道組合下的制動控車模式曲線,這3種型號的車載ATP嵌入的制動控車模式曲線計算方法大致可以歸納為以下兩種:
第一種:根據國際鐵路聯盟(UIC)制定的UIC544-1標準,研制開發的計算模型(以下簡稱“歐標計算法”)。
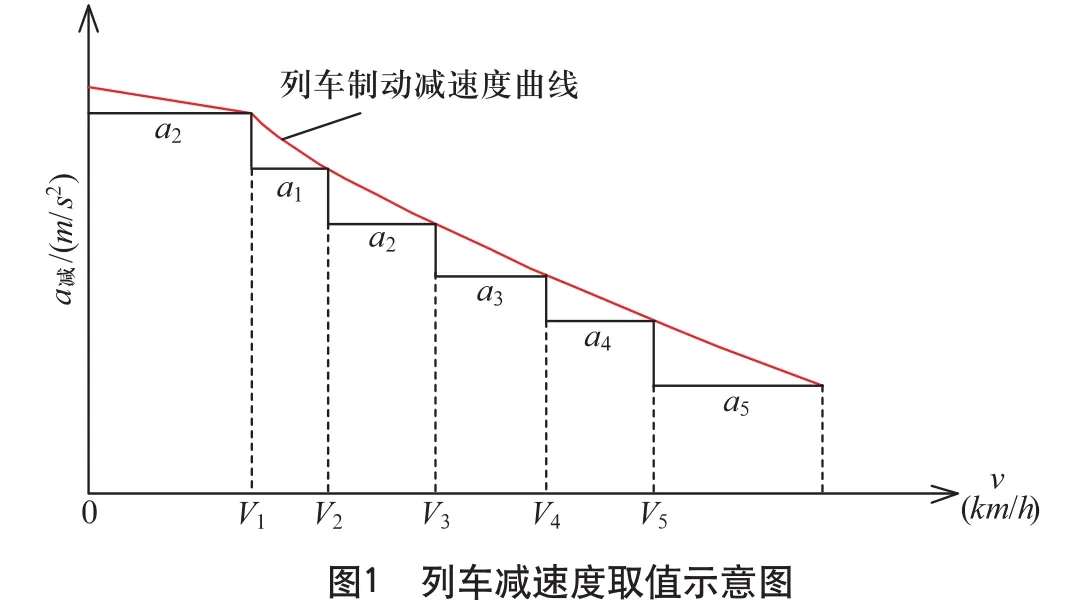
為了計算簡單快捷,將列車的整個制動過程中的實際減速度近似劃分為(最多)6個階梯,每個階梯對應一個固定的減速度,如圖1所示,階梯固定減速度a0、a1、a2、a3、a4、a5),通過動力學公式按照實際線路坡道近似計算出制動控車模式曲線。
第二種:采用日立公司研制開發的計算方法(以下簡稱“日立計算法”)。
方法是:預先在車載計算機里儲存幾檔(如:-20‰、-10‰、-5‰、0‰、5‰、10‰六擋)坡度下的制動曲線表。當列車在運行中,車載接受到地面應答器上傳的坡道信息后,把線路坡度歸納到儲存的坡度檔上,并到相應坡度檔的制動曲線表中進行查表計算,得出制動控車模式曲線,具體如圖2所示。
2 存在的問題
列車制動控制模式曲線區域分為兩個部分:一部分為按照固定模式限速值監控列車運行的區域,以下簡稱為“恒速區”;另一個部分為列車在減速地點前從恒速區開始下降直至目標點的運行區域,以下簡稱為“制動區”。

在“恒速區”,根據鐵道部頒布的《鐵路客運專線技術管理辦法》(試行)本的規定:列車在完全監控模式下,按高于允許速度2 km/h報警、5 km/h常用制動、10 km/h緊急制動(250 km/h以下)或15 km/h緊急制動(250 km/h及以上)設置。該規定已經明確了在恒速區內的制動報警、常用制動和緊急制動3種控制速度的取值,大家只需要遵守執行。
在“制動區”,當已知列車停車點、列車至停車點距離內的線路坡道的條件下,可以用動力學公式由停車點開始向列車位置推算列車制動初速度。但由于列車在制動過程中產生的減速度是隨著速度變化而變化,不是一個常數。所以,在推算中,要通過積分方程進行計算。另外,由于列車在“制動區”內,線路是由不同坡道組成的,在推算過程中還需要用試湊方式計算各個變坡點的速度。
為此,各個車載ATP設備廠商為了避開其復雜的計算,研究開發了適合各自車載計算機的計算方法,導致我國高鐵線路上,出現了“歐標計算法”和“日立計算法”兩種方法。
“歐標計算法”把列車的減速度進行了歸類并在各個速度段上賦予了一個不變的減速度值。雖然它簡化了計算,減輕了車載計算機的一部分計算量,滿足了時效性強的要求,但計算出來的制動限速的富余量不均勻,導致設置高效率的曲線比較困難。
“日立計算法”通過查表計算,減少了車載計算機的計算量,提高了計算速度。但得出的制動限速的安全余量不同。如:按照上述六檔坡度預存制動曲線表后,線路坡度為-11‰和-19‰時,都按照-20‰查表計算限速,其安全余量明顯不一。所以,要設置高效率的制動控車模式曲線只能依靠增加輸入制動曲線表來實現,但增加制動曲線表又受到了車載計算機的容量限制。
因此,針對“歐標計算法”和“日立計算法”中存在的缺陷,經過研究提出了以下計算方法。
3 計算方法
我們知道:列車制動距離Sz由制動空走距離Sk和制動有效距離Se組成,它可以用公式(1)和(2)表示。

式中:
V0:列車制動初速度;km/h;
V1、V2:速度間隔的始端速度和末端速度,km/h;
tk:列車制動空走時間,s;
a1-2減:列車在當時坡道上由V1變化到V2的過程中運行減速度的平均值,m/s2。
在公式(2)中,列車在運行中產生的減速度一方面主要與列車本身制動力產生的減速度有關,另一個方面還與坡道有關。因此,當遇到不同坡道組合時,不僅要采用分段計算列車制動有效距離,還需要采用試湊法求出變坡點的速度值,這些計算對于車載計算機來說過于復雜。為了簡化這部分的計算,提出將不同坡道通過計算公式統一轉化為一個虛擬坡道,然后,在這個虛擬坡道上查表計算制動控制速度。具體步驟如下。
1)車載計算機離線狀態下,針對動車組的性能,研究確定將實際坡道轉化為虛擬坡道的計算公式,同時計算在虛擬坡道上的緊急制動有效距離表、常用制動有效距離表、緊急制動控車模式曲線表、常用制動控車模式曲線表和制動報警模式曲線表。并將確定的計算公式和5張制動距離表植入車載計算機里。
2)車載計算機在線運行時,根據設備接收的坡道信息,將不同坡道統一計算到一個虛擬的坡道上,再通過5張制動距離表查表求出當前列車位置的緊急制動控制速度、常用制動控制速度和制動報警速度。
3)把實際的運行速度與計算得出的制動控制速度相比較:如果超過緊急制動控制速度,則觸發緊急制動系統;如果未超過緊急制動控制速度,但超過常用制動控制速度,則觸發常用制動系統;如果未超過常用制動控制速度,但超過制動報警速度,則觸發制動報警系統。
該計算方法使大量的計算工作由人工在車載計算機離線狀態下完成,在實際運行時,車載計算機只需要通過簡單的查表計算就能計算出列車制動控制速度。
4 計算模型
要實現以上計算方法,需要研究出將不同的線路坡道轉化為統一的虛擬坡道的計算模型;研究出在虛擬坡道上推算制動報警、常用制動和緊急制動三條控制模式曲線的計算模型。
4.1 計算虛擬坡道的模型
列車在運行中,車載接受到地面應答器上傳的坡道信息后,計算機將這些線路坡道轉化為統一的虛擬坡道,求出列車距離停車點或行車受限點的虛擬長度。其實際坡道長度轉化為統一的虛擬坡道總長度的計算公式為:

式中:
f(train,ii,li):實際坡道長度轉化為虛擬坡道長度的函數公式,它與列車制動性能、坡度和坡長有關;
ii:第i個坡道的坡度,‰。
li:第i個坡道的坡長,m。
在確定將實際坡道轉化為統一的虛擬坡道的計算公式時,計算列車在虛擬坡道上的緊急制動有效距離表和常用制動有效距離表。
4.2 計算制動報警模式曲線的模型
1)計算緊急制動報警模式曲線的模型
根據緊急制動有效距離曲線的最高速度Vje_max及在其速度至速度Vje_i段的平均減速度aj-、ATP觸發制動的報警時間Tb、常用制動模式曲線與緊急制動模式曲線之間余量間隔時間Ty、ATP觸發緊急制動系統的延遲時間Tjst、ATP切斷牽引時間Tqd和列車緊急制動空走時間Tjk,推導緊急制動報警速度Vjb_i的計算圖如圖3所示。

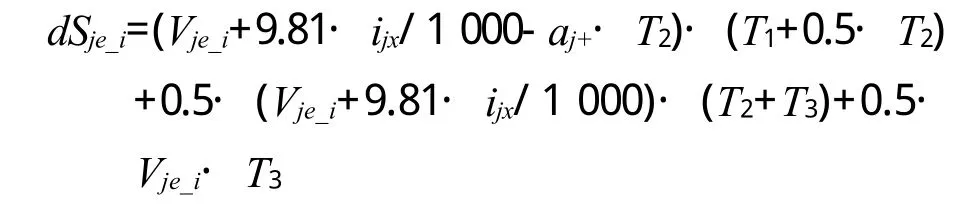
根據圖3,在列車緊急制動有效距離曲線上,列車速度由Vje_max到Vjb_i時,列車制動運行的距離為 dSje_i,則 :

為了簡化推導公式,在上式中和以下涉及的速度單位均為m/s、時間單位均為s、加減速度單位均為m/s2。

經過整理:

其中:aj+為T2時間內的平均加速度,但考慮到計算方便,其加速度按照速度Vje_max至Vje_max-10 km/h之間的平均加速度進行取值,以下同。
將(6)、(7)式代入(5)得出:
經過整理得出:

設:

上式可以寫成:

將上式代入(7)式,得出緊急制動報警速度:

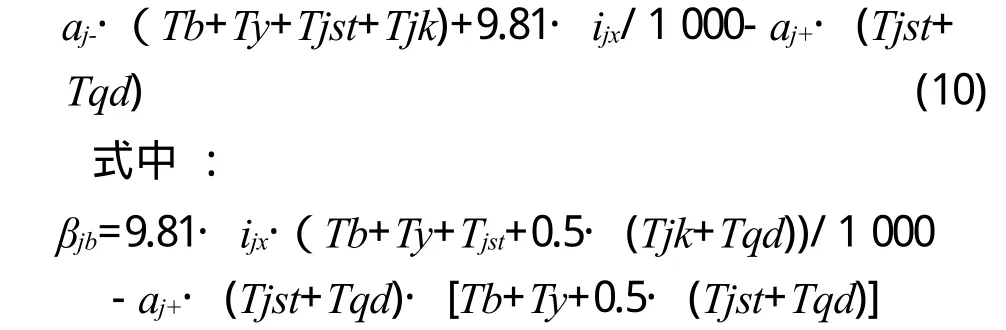
根 據 圖 3, 將 T1=Tb+Ty、T2=Tjst+Tqd、T3=Tjk-Tqd代入上式(9)得出緊急制動報警速度:

2)計算常用制動報警模式曲線的模型
根據常用制動有效距離曲線的最高速度Vce_max及在其速度至速度Vce_i段的平均減速度ac-,ATP觸發制動的報警時間Tb、ATP觸發常用制動系統的延遲時間Tcst、ATP切斷牽引時間Tqd和列車常用制動空走時間Tck,推導常用制動報警速度Vcd_i的計算圖如圖4所示。

根據圖4并結合公式(9)可以得出常用制動報警速度Vcb_i的計算公式:

其中:ac+為T2時間內的平均加速度,但考慮到計算方便,其加速度按照速度Vce_max至V2ce_max-10 km/h之間的平均加速度進行取值,以下同。
根據圖4,將T1=Tb、T2=Tcst+Tqd、T3=Tck-Tqd代入上式(11)得出常用制動報警速度:
3)制動報警模式曲線計算模型
通過公式(10)和公式(12)的計算,列車觸發制動系統的報警速度Vb-i取兩個計算值和制動報警限速的最小值,即:

式中:Vbx為制動報警限速值。
4.3 計算常用制動模式曲線的模型
1)根據緊急制動有效距離曲線的速度Vje_max及在其速度至速度Vje_i段的平均減速度aj_、常用制動模式曲線與緊急制動模式曲線間余量時間Ty、ATP觸發緊急制動系統的延遲時間Tjst、ATP切斷牽引時間Tqd和列車緊急制動空走時間Tjk,由緊急制動曲線推導的常用制動模式曲線速度Vjc_i的計算圖如圖5所示。

根據圖5并結合公式(9)可以在緊急制動距離曲線的基礎上,推導出常用制動模式曲線速度Vjc_i的計算公式:

2)根據常用制動有效距離曲線的速度Vce_max及在其速度至速度Vce_i段的平均減速度ac-、ATP觸發常用制動系統的延遲時間Tcst、ATP切斷牽引時間Tqd和列車常用制動空走時間Tck,由常用制動推導的常用制動模式曲線速度Vcc_i計算圖如圖6所示。
根據圖6并結合公式(9)可以在常用制動距離曲線的基礎上,推導出常用制動模式曲線的速度Vcc_i的計算公式:

將 T1=0、T2=Tcst+Tqd、T3=Tck-Tqd代入式(16)得出:

3)通過公式(15)和公式(17)的計算,列車常用制動模式曲線速度Vc_i取兩個計算值和常用制動控制曲線限速的最小值,即:

式中:Vcx為常用制動控制曲線的限速值。
4.4 計算緊急制動模式曲線的模型
根據緊急制動有效折算距離曲線的速度Vje_max及在其速度至速度Vje_i段的平均減速度aj-、ATP觸發緊急制動系統的延遲時間Tjst、ATP切斷牽引時間Tqd和列車緊急制動空走時間Tjk,推導緊急制動控制模式曲線速度Vjj_i計算圖如圖7所示。

根據圖7并結合公式(9)可以得出緊急制動模式曲線速度Vj_i的計算公式:

根據圖7,將T1=0、T2=Tjst+Tqd、T3=Tjk-Tqd代入上式(19)得出緊急制動控制模式曲線速度Vj_i的計算公式:

圖8 制動模式曲線推導圖
5 計算實例
我們以CRH380AL為例,當最高運行速度和車載相關參數設定如表1所示時,當虛擬坡道在緊急制動和常用制動模式曲線推導中都采用平道時,CRH380AL動車組緊急制動模式曲線、常用制動模式曲線和制動報警曲線推導圖如圖8所示。

表1 CRH380AL車載設備相關參數表表1 TSRS間非提示類限速狀態判定表

圖8 制動模式曲線推導圖