地下礦無人駕駛電機(jī)車運(yùn)輸關(guān)鍵技術(shù)方案研究
2013-06-26 05:56:50張毅力汪令輝黃壽元
金屬礦山 2013年5期
關(guān)鍵詞:礦山
張毅力 汪令輝 黃壽元
(1.銅陵有色金屬集團(tuán)控股有限公司;2.銅陵有色金屬集團(tuán)股份有限公司冬瓜山銅礦;3.中國恩菲工程技術(shù)有限公司)
礦山地下運(yùn)輸特別是礦石運(yùn)輸是地下采礦系統(tǒng)的關(guān)鍵工程之一。礦石運(yùn)輸目前主要采用3種形式,即軌道運(yùn)輸、無軌運(yùn)輸、皮帶運(yùn)輸,目前國內(nèi)地下軌道運(yùn)輸主流是以電機(jī)車作為牽引設(shè)備[1]。國內(nèi)軌道運(yùn)輸也存在一系列問題,如采用的信集閉生產(chǎn)調(diào)度系統(tǒng)僅能指揮電機(jī)車運(yùn)行,不能直接控制電機(jī)車的運(yùn)行,對電機(jī)車的控制能力低;基于信集閉硬件構(gòu)成和工作原理,不能獲得電機(jī)車的準(zhǔn)確位置,有些區(qū)段劃分受到硬件設(shè)備限制不合理等諸多原因,造成信集閉調(diào)度效率不高;人工操作電機(jī)車使得礦石運(yùn)輸受到人為因素的影響很大,人員疲憊、闖紅燈現(xiàn)象時(shí)有發(fā)生,甚至出現(xiàn)嚴(yán)重事故。
隨著采礦業(yè)技術(shù)的不斷發(fā)展和礦產(chǎn)資源需求的擴(kuò)大,采礦規(guī)模越來越大,年開采量上千萬噸級特大礦山不斷出現(xiàn)。一些特殊礦山處于高海拔、超深度,存在大量涌水或其他危險(xiǎn),礦山對礦石運(yùn)輸能力、效率和安全性提出了越來越高的要求。隨著社會的發(fā)展和人們生活水平的提高,人工成本在采礦成本中占的比例也不斷增大。人們對工作環(huán)境的要求也不斷提高,許多學(xué)者認(rèn)為無人采礦技術(shù)是21世紀(jì)采礦重要發(fā)展領(lǐng)域[2]。無人駕駛的電機(jī)車運(yùn)輸技術(shù)正是朝著這個(gè)目標(biāo)邁進(jìn)的重要環(huán)節(jié),它提供了一種可靠、安全的運(yùn)輸方案,可以滿足礦山地下運(yùn)輸?shù)倪@些新需求。這一技術(shù)對于大型礦山、特大型礦山、特殊礦山都有很好的適用性。從經(jīng)濟(jì)效益、環(huán)境效益和社會效益看,無人駕駛也是地下礦電機(jī)車運(yùn)輸發(fā)展趨勢,開發(fā)礦用無人駕駛電機(jī)車技術(shù)是一項(xiàng)重大技術(shù)需求。
目前國外此類技術(shù)的使用條件是在全封閉無人行走的巷道內(nèi)使用,這和我國現(xiàn)有礦下條件有較大區(qū)別。而無人駕駛電機(jī)車運(yùn)輸技術(shù)目前在國內(nèi)及亞洲還處于空白階段,尚無地下礦運(yùn)輸采用無人駕駛電機(jī)車的應(yīng)用實(shí)例。在歐洲少數(shù)國家有少數(shù)大型礦山在采用此項(xiàng)技術(shù),例如瑞典的Kriuna礦從20世紀(jì)80年代就采用了無人駕駛電機(jī)車運(yùn)輸技術(shù)[3],但是類似礦山世界范圍內(nèi)不超過5家。由于此項(xiàng)技術(shù)在世界采礦業(yè)很少采用,因此相關(guān)報(bào)道和技術(shù)資料也很少。再加上國外公司對此項(xiàng)技術(shù)的保密,使得此項(xiàng)技術(shù)的研發(fā)難度很大。2011年5月,中國恩菲工程技術(shù)有限公司與銅陵有色金屬集團(tuán)冬瓜山銅礦聯(lián)合,在冬瓜山銅礦進(jìn)行了實(shí)地試驗(yàn),取得了成功。
1 應(yīng)用現(xiàn)場特征與關(guān)鍵技術(shù)環(huán)節(jié)
地下礦無人駕駛電機(jī)車運(yùn)輸控制系統(tǒng)試驗(yàn)選擇在銅陵有色金屬集團(tuán)冬瓜山銅礦-875 m運(yùn)輸中段進(jìn)行。牽引設(shè)備為20 t電機(jī)車2臺,采用前后雙機(jī)牽引,1列編組11節(jié)車皮,頭尾長度82 m,直流滑觸線供電電壓為550 V,裝卸載站各1個(gè),相距750 m,彎道2處,軌道寬度900 mm。
無人駕駛電機(jī)車運(yùn)輸技術(shù)是一項(xiàng)綜合性技術(shù),它是集采礦技術(shù)、機(jī)械技術(shù)、工程設(shè)計(jì)技術(shù)、變頻拖動技術(shù)、總線通訊技術(shù)、無線通訊技術(shù)、計(jì)算機(jī)技術(shù)、控制技術(shù)、信集閉技術(shù)、特殊傳感器技術(shù)等多領(lǐng)域技術(shù)為一體的多學(xué)科、多領(lǐng)域的綜合技術(shù)。這些技術(shù)可以分為兩類,第一類為無人駕駛電機(jī)車的設(shè)備系統(tǒng)的軟硬件技術(shù),主要包括變頻拖動技術(shù)、總線通訊技術(shù)、無線通訊技術(shù)、計(jì)算機(jī)技術(shù)、控制技術(shù)、信集閉技術(shù)、特殊傳感器技術(shù)等,而采礦技術(shù)、機(jī)械技術(shù)、工程設(shè)計(jì)技術(shù)等則是第二類,主要作為無人駕駛電機(jī)車的應(yīng)用條件。本研究主要闡述運(yùn)用第一類技術(shù)的方案確定。
2 電機(jī)車運(yùn)輸技術(shù)方案確定
電機(jī)車是無人駕駛電機(jī)車運(yùn)輸環(huán)節(jié)中的重要設(shè)備,是無人駕駛電機(jī)車運(yùn)輸主要的監(jiān)控對象。因此,電機(jī)車的技術(shù)方案直接關(guān)系到本研發(fā)課題的成敗。其中需要解決的關(guān)鍵技術(shù)包括驅(qū)動關(guān)鍵技術(shù)、控制方案以及關(guān)鍵傳感器技術(shù)。本研究提出的一套技術(shù)合起來形成了智能電機(jī)車技術(shù)方案。
2.1 機(jī)車驅(qū)動技術(shù)方案
無人駕駛電機(jī)車由于沒有操作人員隨車操作,不能根據(jù)現(xiàn)場情況隨時(shí)調(diào)整電機(jī)車的控制狀態(tài),特別是在電機(jī)車減速和減速停車階段,控制是否精確直接關(guān)系到運(yùn)輸系統(tǒng)的安全。因此,電機(jī)車控制精度必須準(zhǔn)確和可靠。在目前的電機(jī)車驅(qū)動方式中,只有變頻器驅(qū)動電機(jī)車方式才能滿足此要求,而且變頻器是一項(xiàng)成熟技術(shù),已經(jīng)廣泛應(yīng)用于工業(yè)的各個(gè)領(lǐng)域。最終確定采用變頻器驅(qū)動方案。
2.2 機(jī)車控制技術(shù)方案的確定
無人駕駛電機(jī)車運(yùn)輸最終要實(shí)現(xiàn)在地表集中控制室遙控完成電機(jī)車運(yùn)輸任務(wù),其目的之一就是在安全的前提下減輕操作人員的勞動強(qiáng)度;如果電機(jī)車運(yùn)行完全依靠人工遙控控制,不僅操作人員的勞動強(qiáng)度很大,更主要的是也無法保證運(yùn)輸?shù)陌踩R虼耍姍C(jī)車必須具備智能控制系統(tǒng),電機(jī)車在絕大多數(shù)時(shí)間內(nèi)按照生產(chǎn)要求自動運(yùn)行,在個(gè)別環(huán)節(jié)由人工遙控操作,這樣不僅可以減輕操作人員的勞動強(qiáng)度,也可以使得電機(jī)車運(yùn)行更加安全和高效。因此,電機(jī)車控制必須具備智能功能。
在無人駕駛電機(jī)車運(yùn)輸中,電機(jī)車在以下方面實(shí)現(xiàn)了智能化。
(1)按照調(diào)度指令自動運(yùn)行:電機(jī)車在接收到調(diào)度指令后,可以按照設(shè)定好的程序自動運(yùn)行,在運(yùn)行線路中的彎道、道岔、裝載、卸載、直道分別選擇不同的運(yùn)行速度,在設(shè)定的位置自動升降集電弓、自動鳴笛、自動停車等待。
(2)電機(jī)車自動保護(hù)功能:電機(jī)車在運(yùn)行過程中,可以根據(jù)整體運(yùn)輸線路情況自動降低運(yùn)行速度,防止發(fā)生追尾事故;可以根據(jù)整體運(yùn)輸線路情況自動停止,避免與前方停止機(jī)車碰撞;可以根據(jù)整體運(yùn)輸線路情況,自動選擇駛出穿脈時(shí)機(jī),避免不必要的緊急制動。
(3)電機(jī)車控制方式:為了適應(yīng)電機(jī)車實(shí)際生產(chǎn)需求,電機(jī)車具有遙控方式、自動方式、人工方式、檢修方式。通過以上控制方式完全可以滿足電機(jī)車正常生產(chǎn)、遠(yuǎn)程遙控、臨時(shí)人工操作、設(shè)備檢修等需求。
(4)電機(jī)車同步控制:試驗(yàn)中礦石運(yùn)輸采用前后2臺電機(jī)車牽引運(yùn)輸形式,因此2臺電機(jī)車必須保持同步操作功能。
(5)電機(jī)車事故處理:當(dāng)其中一臺電機(jī)車出現(xiàn)故障時(shí)(此處指電氣故障),采用智能處理方式,及時(shí)退出故障設(shè)備,由集中控制室人員遙控退出運(yùn)輸任務(wù),減少事故占道情況的發(fā)生,保證運(yùn)輸?shù)目煽啃浴?/p>
(6)電機(jī)車完善的控制功能:電機(jī)車可以根據(jù)運(yùn)行要求,實(shí)現(xiàn)自動加速、減速、慣性停車、斜坡停車、緊急電氣制動、緊急氣剎制動、停車駐車控制、溜車駐車控制等諸多在電機(jī)車運(yùn)行中需要的控制功能。
(7)優(yōu)異的電壓適應(yīng)范圍:有些地下運(yùn)輸線路很長,滑觸線電壓經(jīng)常波動很大,再加上升降集電弓的要求,因此變頻器必須適應(yīng)直流電壓從0~550 V的工作環(huán)境。經(jīng)過對變頻器的二次開發(fā),使得變頻器完全可以適應(yīng)上述工作環(huán)境。
2.3 特殊傳感器方案
在無人駕駛電機(jī)車運(yùn)輸中,電機(jī)車的位置和速度是重要的參數(shù),首先要解決機(jī)車運(yùn)輸過程中的振動問題。要分析電機(jī)車的工作環(huán)境。地下電機(jī)車運(yùn)輸?shù)恼w工作環(huán)境無法與地表民用鐵路相比,電機(jī)車本身制造精度就比較低,礦用電機(jī)車本身減震性能差,井下礦鐵軌敷設(shè)平整度不高,彎道、岔道在整個(gè)運(yùn)輸線路中占比重很大,電機(jī)車經(jīng)過卸載站時(shí)處于懸空狀態(tài),所有這些最終造成電機(jī)車在運(yùn)行時(shí),電機(jī)車整體振動非常大,這就給選擇檢測設(shè)備帶來很大的難度。
在以往人們對電機(jī)車技術(shù)改造過程中,選擇傳統(tǒng)的旋轉(zhuǎn)編碼器檢測電機(jī)車的位移和速度,但是經(jīng)過使用證明,由于電機(jī)車本身的高振動性,旋轉(zhuǎn)編碼器使用壽命很短,不能滿足電機(jī)車的使用工況要求。經(jīng)過與電機(jī)車廠家密切合作,并與相關(guān)傳感器廠家合作研發(fā),從檢測設(shè)備機(jī)構(gòu)上進(jìn)行突破,較好地解決了電機(jī)車運(yùn)行過程中存在的振動問題,研制出了可以準(zhǔn)確檢測電機(jī)車位移和速度的傳感器。
3 通訊技術(shù)方案的確定
3.1 地下無人駕駛電機(jī)車無線通訊環(huán)境分析
地下電機(jī)車主要是在巷道內(nèi)運(yùn)行,試驗(yàn)現(xiàn)場通訊巷道截面為高×寬=3.2 m×3 m,彎道半徑在60 m,1列編組頭尾人的目光不能相見。巷道表面坑洼不平。電機(jī)車寬度1.8 m,高度2 m。1列運(yùn)礦編組長度在70 m左右,電機(jī)車與巷道左右間隙在0.6 m左右。
根據(jù)無線通訊實(shí)際試驗(yàn),1列運(yùn)礦編組對無線通訊的活塞效應(yīng)非常明顯,在有運(yùn)礦編組存在的巷道,無線通訊有效截面幾乎減小到空巷道的1/3。通訊距離縮短為空巷道通訊距離的1/3到1/2。
狹長的巷道對通訊距離影響也非常大,通常地表空曠地帶通訊距離1~2 km的設(shè)備,在地下直巷道通訊距離在200~300 m,彎巷道通訊距離更短。
在狹長的巷道采用無線通訊,除了對通訊距離有很大影響外,無線電波反射也會給通訊造成不良影響。地表無線電波隨著傳播距離的增大逐步降低,而地下巷道內(nèi),在無線電波還沒有衰減時(shí)就會沒有規(guī)律地不斷被反射,從而給無線通訊帶來不良影響。
3.2 無人駕駛電機(jī)車運(yùn)輸對無線通訊的需求分析
要實(shí)現(xiàn)無人駕駛電機(jī)車運(yùn)輸必須具備2條鏈路的無線通訊。1條鏈路是1列編組的頭車和尾車之間通訊,實(shí)現(xiàn)頭車和尾車同步控制;另外1路是電機(jī)車與集中控制室之間的無線通訊,實(shí)現(xiàn)把電機(jī)車的運(yùn)行數(shù)據(jù)傳送到集中控制室,同時(shí)把集中控制室的指令發(fā)送給電機(jī)車。
無線通訊對象的數(shù)量。無人駕駛電機(jī)車運(yùn)輸使用的無線通訊對象通常是固定的,一般大型礦山同時(shí)運(yùn)行4列編組即可滿足運(yùn)輸生產(chǎn)需求,特大性礦山同時(shí)運(yùn)行編組數(shù)量基本上也超不過8列編組。其通訊對象特點(diǎn)是對象固定且數(shù)量少。
無線通訊的數(shù)據(jù)容量。無人駕駛電機(jī)車運(yùn)輸?shù)目刂埔鬀Q定著每一個(gè)通訊對象通訊的數(shù)據(jù)容量。經(jīng)過仔細(xì)計(jì)算每個(gè)對象工作任務(wù),在滿足控制要求的前提下,把總的通訊數(shù)據(jù)容量壓縮到最小字節(jié)。
無線通訊覆蓋范圍要求。為了確保無人駕駛電機(jī)車運(yùn)輸?shù)陌踩煽浚仨氃谡麄€(gè)運(yùn)輸范圍內(nèi)覆蓋無線通訊,不能出現(xiàn)通訊死角。
無線通訊速率及中斷要求。為了保證對電機(jī)車的可靠控制,通訊速率必須滿足集中遙控電機(jī)車的要求。對于整個(gè)無線通訊覆蓋范圍內(nèi)出現(xiàn)的少數(shù)通訊中斷情況,必須采用智能彌補(bǔ)方法補(bǔ)救,確保控制指令的及時(shí)下達(dá)和滿足生產(chǎn)安全。
3.3 通訊方案確定
隨著科學(xué)技術(shù)的不斷發(fā)展,無線通訊技術(shù)也得到迅猛發(fā)展,各種類型、各種用途的無線通訊技術(shù)不斷涌現(xiàn)。已經(jīng)在地下巷道使用的無線通訊有小靈通、泄漏通訊、WIFI、ZigBee、PLC無線、串口無線通訊等。
通過對無人駕駛電機(jī)車運(yùn)輸對無線通訊的需求以及這些通訊技術(shù)特點(diǎn)的綜合分析,采用了以下無線通訊方案:在集中控制室設(shè)置無線通訊主站,沿巷道敷設(shè)RS485電纜,根據(jù)實(shí)際情況在RS485電纜上掛接無線通訊中繼器。通過無線通訊中繼器與移動電機(jī)車收發(fā)一體機(jī)進(jìn)行通訊,從而組成完整的通訊網(wǎng)絡(luò)。無線通訊方案如圖1所示。
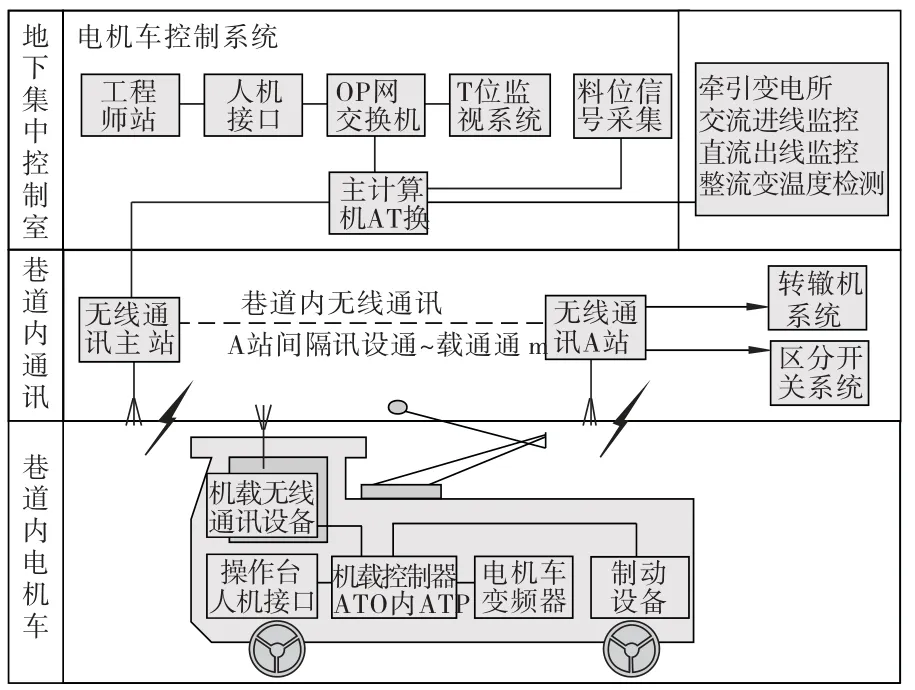
圖1 無線通訊方案
此方案具備以下特點(diǎn):沿巷道敷設(shè)電纜傳輸信號可靠,并且技術(shù)成熟;此種網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)適合本課題的要求;采用總線控制交換技術(shù),有效解決多徑干擾問題;采用縮技術(shù)將數(shù)據(jù)壓縮到1 ms,使得無線信號抗干擾能力強(qiáng);對于彎道處頭車和尾車的通訊,采用在中間車皮上增加一個(gè)中繼器的方案解決。
4 其他方面
4.1 是否需要獨(dú)立的調(diào)度系統(tǒng)
信集閉一直以來是國內(nèi)礦石軌道運(yùn)輸必備的生產(chǎn)調(diào)度指揮系統(tǒng),無人駕駛電機(jī)車運(yùn)輸是否需要單獨(dú)設(shè)置獨(dú)立的信集閉系統(tǒng)?通過試驗(yàn)研究的逐步深入,得出結(jié)論是:無人駕駛電機(jī)車運(yùn)輸控制系統(tǒng)應(yīng)該同時(shí)具備信集閉統(tǒng)一調(diào)度所有電機(jī)車功能,這樣才能實(shí)現(xiàn)無人駕駛電機(jī)車運(yùn)輸,并有效地提高運(yùn)輸效率。對于已建礦山現(xiàn)有的信集閉系統(tǒng)要根據(jù)實(shí)際礦山生產(chǎn)情況和生產(chǎn)方式,決定是否需要保留,這里不做過多討論。
4.2 裝載站控制技術(shù)方案的確定
在無人駕駛電機(jī)車運(yùn)輸環(huán)節(jié)中,裝載站是一個(gè)難點(diǎn)。由于裝礦站受到目前裝礦設(shè)備和礦石性質(zhì)等各種因素的影響,要想實(shí)現(xiàn)自動按照控制程序裝礦幾乎是不可能的。
首先在裝礦環(huán)節(jié)中缺少計(jì)量設(shè)備,限于地下工況和安裝空間限制,安裝計(jì)量設(shè)備是不可能的。其次,溜井內(nèi)礦石粒度、料位高度等對放礦都會產(chǎn)生影響,因此放礦速度不可能均勻和一樣。因此在裝礦環(huán)節(jié)上無法實(shí)現(xiàn)定時(shí)或定量裝礦。
基于上述原因,采用遠(yuǎn)程遙控裝礦設(shè)備運(yùn)行、遙控電機(jī)車移動裝礦位置、視頻觀測裝礦情況方法來解決裝礦問題。
5 結(jié)論
無人駕駛能夠滿足許多礦山日益發(fā)展的新需求,是地下礦電機(jī)車運(yùn)輸發(fā)展趨勢。以冬瓜山銅礦為背景,分析了無人駕駛電機(jī)車技術(shù)的關(guān)鍵問題、技術(shù)環(huán)節(jié),提出了相應(yīng)的技術(shù)方案,主要包括智能電機(jī)車技術(shù)方案、通訊技術(shù)方案、調(diào)度系統(tǒng)方案以及裝載站控制技術(shù)方案。聯(lián)合攻關(guān)研制出的新型變頻礦用電機(jī)車已經(jīng)在銅陵有色金屬集團(tuán)冬瓜山銅礦-875 m運(yùn)輸中段投入應(yīng)用,初步效果良好。
不同的礦山條件不同,具體技術(shù)需求可能差異較大,相應(yīng)的技術(shù)方案也會有差異。例如,可能需要研發(fā)無人駕駛電機(jī)車防撞人系統(tǒng)等。本研究關(guān)于技術(shù)方案確定的思路可供各種礦用無人駕駛電機(jī)車技術(shù)方案制定做參考。
[1] 陸國閏.80年代瑞典地下鐵礦開采技術(shù)[J].礦山技術(shù),1990(1):56-70.
[2] 吳和平,吳 玲,張 毅,等.井下無人采礦技術(shù)裝備導(dǎo)航與控制關(guān)鍵技術(shù)[J].有色金屬:礦山部分,2007,59(6):12-16.
[3] 沈德貴.90年代國外金屬地下礦采礦技術(shù)[J].國外金屬礦山,1991(10):28-37.
猜你喜歡
資源節(jié)約與環(huán)保(2022年8期)2022-09-20 02:24:38
現(xiàn)代礦業(yè)(2021年12期)2022-01-17 07:30:32
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
石材(2020年11期)2021-01-08 09:21:48
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
陽光(2020年6期)2020-06-01 07:48:36
當(dāng)代工人·精品C(2020年1期)2020-05-20 07:54:37
建材發(fā)展導(dǎo)向(2019年11期)2019-08-24 06:35:46