自動跟蹤式光伏發電計算機監控系統的設計
2013-06-28 09:23:12曹曉麗
電源技術 2013年4期
劉 嬌,曹曉麗,劉 揚
(1.石家莊信息工程職業學院,河北石家莊050035;2.石家莊工程職業學院,河北石家莊050000)
目前,在世界能源結構中,人類主要利用的是煤炭、石油、天然氣等化石能源。然而由于這些能源的大量開發,已經瀕臨枯竭,同時這些能源的使用給人類生存環境帶來了諸多不利的影響,因此人類大力開發新能源。在所有的新能源當中,太陽能是最為引人注目的一種。而太陽能光伏發電作為太陽能利用的重要方式,發展前景非常廣闊,成為未來解決能源危機的重要途徑。但太陽能光伏發電存在的一個瓶頸問題就是發電效率低,大大限制了太陽能光伏發電的應用和發展。目前,在太陽能利用領域中,如何最大限度地提高光伏發電效率,仍為國內外學者的研究熱點。解決這一問題的一種重要可行的途徑是進行太陽自動跟蹤。目前,我國大多數太陽能陣列的安裝方式都采用固定式,這種方式安裝簡單、維護方便,但是不利于太陽能的收集過程,太陽能的利用率較低。為了改變這一現狀,利用跟蹤式的太陽能收集系統勢在必行。據相關科研機構調查研究,采用自動跟蹤式的太陽能系統比固定式的太陽能系統效率高35%左右。因此研究太陽能的自動跟蹤式發電系統具有重要意義[1]。
1 自動跟蹤式太陽能發電系統原理
當太陽光線以不同的入射角投射到同一面積上時,所能收集到的能量有所不同。假設截面為1 m2的太陽光束以不同的入射角投射到平面上,如果光線垂直投射,入射角θ=0,包含在太陽光線里的能量分布在1 m2的面積上;如果入射角0<θ<90°,同樣多的能量分布在1/cosθm2的面積上;當能量一定時,單位面積上的能量與面積成正比,所以以θ角入射時單位面積上的能量,只有垂直入射能量的cosθ倍。當光線以85°角入射時,單位面積上的能量大約只有垂直投射時的1/12[2]。由此可見,太陽光入射角不同,收集能量的效率相差很大,只有在與接收面保持垂直投射時效率才最高。因為太陽在天空中的方位是不斷變化的,所以固定式太陽陣列在一天當中,只有一個時刻可以保證垂直入射,其它時間都是存在著太陽輻射能量浪費的情況。
2 系統整體結構
通常,太陽跟蹤可以采用兩種方式,一種是連續跟蹤,另一種是間歇跟蹤。連續跟蹤方法為跟蹤角連續按照太陽的位置變化規律隨時間調節,以跟隨太陽運行軌跡變化的控制方法。這種方法精確度高,但是電機的不停運動,將消耗大量的電能,同時,機械轉軸磨損嚴重。因此,連續跟蹤方法并不適合用在太陽能發電系統。間歇跟蹤方法為每隔一段時間,運動軸根據所檢測的太陽的方位角和高度角調整一次跟蹤角,其余時間跟蹤角驅動機構固定不動而形成的跟蹤方法[3]。間歇跟蹤方法一方面可以簡化系統控制結構,避免龐大的減速系統;另一方面還可以減少步進電機的運行次數,增加電機的運行壽命,降低跟蹤運動系統本身的能耗。所以本文采取間歇跟蹤方式構建跟蹤系統。
光伏陣列運動控制系統主要由五大部分構成:完成跟蹤功能的機械設備、步進電機、步進電機驅動程序、太陽軌跡跟蹤程序、計算機監控中心。自動跟蹤式光伏發電系統整體流程如圖1所示。其中,以計算機為控制核心,接收利用光電檢測模塊輸出的太陽方位角信號,并結合太陽運動軌跡跟蹤模塊計算出太陽高度角和方位角的理論值,控制雙軸跟蹤裝置中兩個步進電機的轉動,進而實現對太陽的跟蹤。
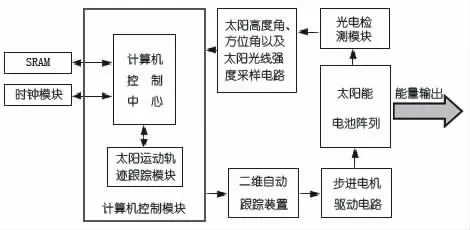
圖1 光伏發電系統自動跟蹤裝置框圖
太陽方位及光強檢測傳感器放置在太陽電池板上,太陽電池板安裝在轉動架上,傳感器與太陽能面板保持平行,作為光電跟蹤系統的前端檢測部分,主要檢測太陽在天空中的方位以及當前環境中光線的強弱,得出相應的數據,數據送入計算機監控中心,監控中心根據檢測結果進行天氣判斷和光電跟蹤。太陽電池板的下方設置兩個步進電機和相應的減速傳動機構作為跟蹤系統的執行機構,監控中心的監控程序將程序的計算結果傳給控制部分,這時控制部分就可以帶動太陽電池板做水平旋轉和俯仰運動,以實現對太陽的跟蹤。
3 系統軟件
本系統軟件部分的主要功能是利用計算機的計算能力來完成太陽自動跟蹤的數據處理部分。整個系統主要包括數據采集程序、太陽自動跟蹤主程序、太陽運動軌跡跟蹤程序、光電跟蹤程序。
軟件的第一部分是數據采集部分,主要完成的功能是將太陽方位檢測電路的輸出電壓信號和光強檢測電路的輸出電壓信號經A/D采集通道輸入到計算機中。計算機采用相應的數據庫系統來對數據進行存儲,然后對這些數據作進一步的處理和分析。
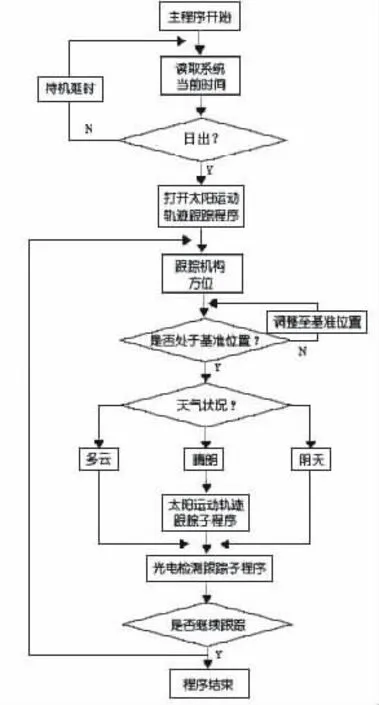
圖2 太陽自動跟蹤主程序框圖
軟件的第二部分是太陽自動跟蹤主程序。程序框圖如圖2所示。首先獲取系統當前日期、時間信息,以及系統所在地的經度和緯度值,計算出當天的日出和日落時間,根據日落時間來判斷是否滿足條件,然后打開太陽運動軌跡跟蹤程序,讓跟蹤機構處于基準位置,當跟蹤機構轉自起始位置后,系統進入循環。循環過程中,計算機對采樣到的光強檢測信號進行分析處理,并判斷出當天的天氣情況,分為晴天、多云和陰雨三種情況,通過對太陽運動軌跡跟蹤程序和光電檢測跟蹤程序的不同調用,分別采取三種不同的工作模式進行太陽方位跟蹤。陰雨天氣時,直接跳過跟蹤子程序,不進行跟蹤,直到天氣好轉后再繼續跟蹤。
一次跟蹤后,程序要延遲等待一段時間,在進行下一次跟蹤。在下一次跟蹤前,要判斷當前時間是否在日落之前,如果是,則繼續跟蹤循環;反之,跳出跟蹤循環,并驅動裝置返回基準位置,跟蹤系統停止工作。
軟件的第三部分是太陽運動軌跡跟蹤程序。該部分是整個程序的核心,需要根據太陽運動方式編寫出相應的軌跡跟蹤算法,從而完成太陽運動軌跡跟蹤的功能。編寫算法的主要思路為:首先根據數據采集部分收集到的時間、日期、當地的經度、緯度、天氣等信息來計算當前時刻太陽高度角和方位角的理論值,并且根據這一數據,與上一次跟蹤時間間隔求出與上一次跟蹤時的太陽高度角和方位角的變化值,用這個變化值以及步進電機的電氣特性推算出高度角電機和方位角電機需要轉動的脈沖數。然后,根據數據采集系統傳送來的數據來判斷跟蹤機構是否處于基準位置,并依據判斷結果來進行太陽運動軌跡跟蹤方式的確定,進而帶動相應電機進行正確運轉。
軟件的第四部分是光電跟蹤程序。主要的功能是確定在下一個時間間隔是否需要進行太陽軌跡跟蹤變動。程序中設置兩個表示太陽方位角和高度角的閾值,并根據采樣到的太陽方位檢測電路的輸出信號,計算出太陽在方位角和高度角方向上偏移量。然后,分別將偏移量的絕對值與閾值進行比較,若均小于閾值,說明太陽運動軌跡跟蹤的積累誤差比較小,不需要進一步的跟蹤,結束子程序;反之,說明需要根據偏移量來控制相應的電機向對應的方向旋轉一定角度,進行太陽陣列方位角及高度角的調整。
系統的軟件部分采用Visusl C++作為開發工具,SQL Server2005作為數據庫支撐系統,并采用相應的實驗硬件,如模擬跟蹤裝置、PC機、數據采集卡、太陽電池板、太陽方位檢測電路、光強檢測電路等對軟件部分進行調試和驗證。實驗結果表明,該算法能夠實現太陽軌跡的跟蹤預測,與實際產生值相對比,誤差較小。如果排除了機械特性誤差之外,跟蹤效果比較理想。
4 結語
本文通過分析天氣的具體情況,采用一種全新的光電跟蹤方式來實現太陽電池板的自動跟蹤模式。這種跟蹤方式是一種全天候的太陽自動跟蹤方法。實驗證明,該方法誤差較小,以該方法設計完成的自動跟蹤式獨立太陽能發電系統能夠基本滿足系統提出的技術指標,可以實現對太陽的自動跟蹤,能夠保證用電負載連續穩定地工作。
[1]彭春明.基于嵌入式的光伏發電自動跟蹤控制系統設計[D].南京:南京理工大學,2012:17-20.
[2]靳志會.太陽能光伏發電系統設計及運行分析[D].河北:河北工業大學,2011:30-35.
[3]徐靜.自動跟蹤式獨立太陽能光伏發電系統研究[D].杭州:杭州電子科技大學,2009:60-65.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
人大建設(2019年12期)2019-05-21 02:55:44
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(2017年9期)2017-09-26 03:41:45
環球時報(2017-03-30)2017-03-30 06:44:45
