碎紙機堵轉保護方法
2013-07-20 04:01:52張曉濤
機械工程與自動化 2013年1期
關鍵詞:方法
張曉濤
(廣州城建職業學院 機電工程系,廣東 廣州 510925)
0 引言
碎紙機是廣泛使用的辦公自動化設備,采用交流異步電動機作為動力機構。異步電動機在全壓啟動過程中,有時不能在設計的啟動時間內迅速達到額定轉速,甚至會出現堵轉或在低轉速下運行的現象。目前常用的電動機防堵轉方法是采用過電流采樣方法[1,2]。過電流采樣,即通過采樣電阻形成采樣電壓,將此采樣電壓與預設的電壓值進行比較,如果超出預設值則認為發生堵轉。此方法的缺陷是:當電機產生過電流時,電機定子、轉子繞組溫升也迅速增加,即使及時地停止啟動過程,過電流對電機性能的影響也是存在的。本文基于交流異步電動機的動態特性來判斷電機啟動過程是否發生堵轉。此方法既可以在轉速發生變化時及時停止電機,避免出現因紙張過多將電機軸卡死難以取出的問題,同時也避免因堵轉產生過流而導致的上述一系列問題。
1 典型碎紙機系統結構
碎紙機包括機械和電子兩大系統。機械系統包括兩大主要部件,即切紙刀和電動馬達,它們之間通過齒輪緊密地連接在一起,馬達帶動齒輪,把能量傳送給切紙刀,而切紙刀通過轉動,用鋒利的金屬角把紙、CD切碎。
典型的碎紙機電子系統結構如圖1 所示。主CPU通過紙傳感器和CD傳感器來檢測紙張和CD信號,并根據光電傳感器判斷紙張類型。控制面板上按鍵包括電源開關、電機正/反轉按鍵、緊急停止按鍵、啟動按鍵等;指示燈包括電源指示燈、門開指示燈、電機堵轉及入口紙過多指示燈、垃圾桶滿指示燈、電機過熱(TCO)指示燈等。
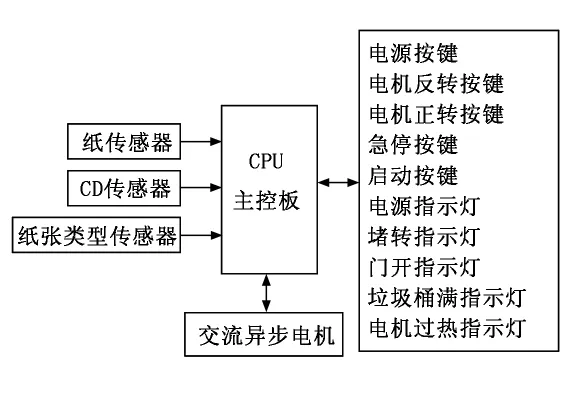
圖1 典型的碎紙機系統結構
2 動態方程及其數值解法
2.1 動態方程
交流異步電動機的電壓方程和轉矩方程[3]為:
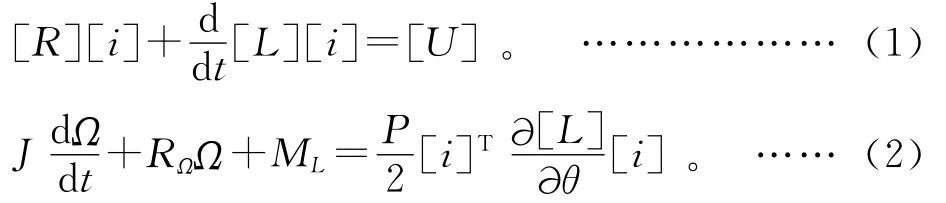
其中:i為電流;R為電阻;U為電壓;L為電感;Ω為角速度;θ為轉子位置角;P為極對數;J為轉動慣量;RΩ為阻尼系數;ML為負載轉矩。
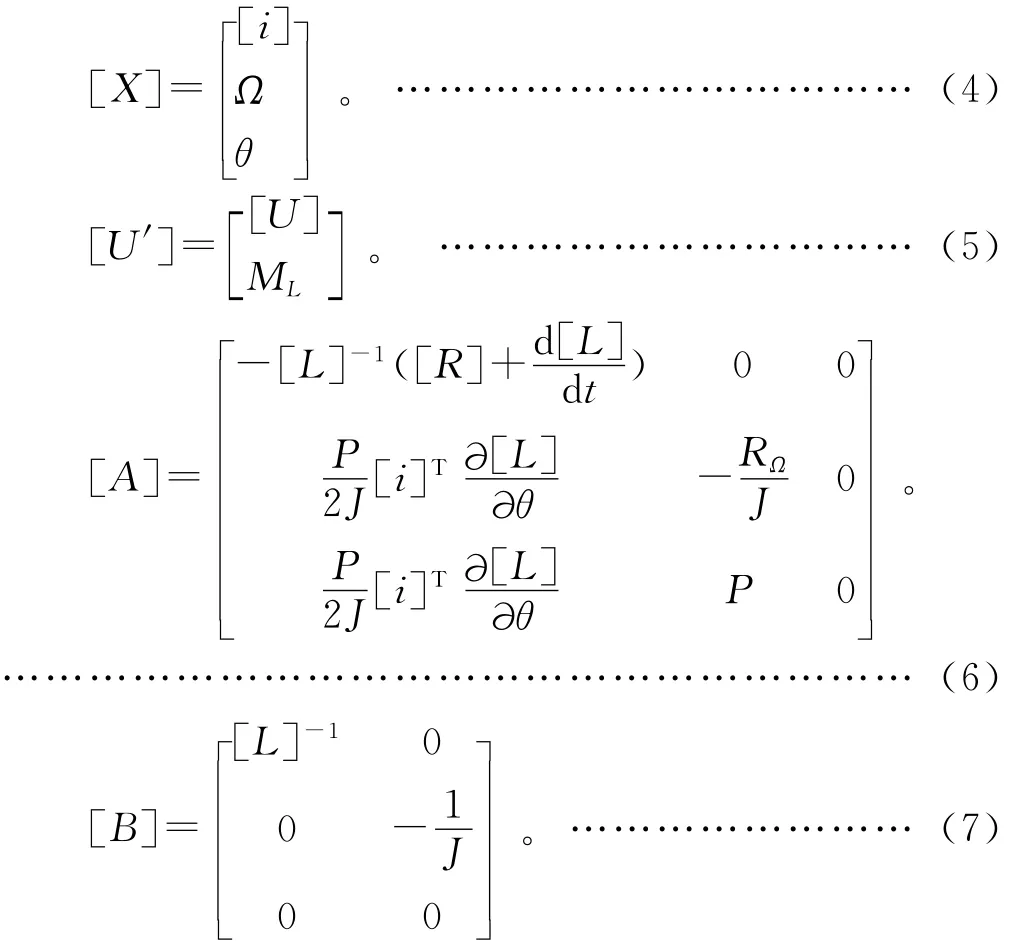
電壓方程和轉矩方程選擇轉子電流、轉子角速度和轉角作為方程變量,采用基爾霍夫定律和達朗貝兒原理,經推導可得出電機的狀態方程為:

其中:
2.2 狀態方程的數值解算法
狀態方程(3)是一組初始條件為零的非線性的微分方程組,可以采用多種方法求解,如:①按冪級數展開式用迭代法;②特征矢量法;③歐拉法;④龍格-庫塔法。前兩種方法運算時間過長;而歐拉法的程序較簡單,但計算結果欠精確;龍格-庫塔法的程序較復雜,但計算結果較精確,用的較普遍。此處采用四階龍格-庫塔方法求解。
3 電機堵轉保護的判定方法
從理論上分析,交流異步電動機在啟動過程中有一個時間-轉速變化曲線,該曲線可以由電機生產廠家提供,也可以通過實際測量得到。圖2 為按照狀態方程(3)采用數值解計算方法得到的某一型號的異步電動機啟動過程的時間-轉速變化曲線。異步電動機參數為:極對數P=2,轉速n=120r/s,負載轉矩ML=0.1 N·m,轉動慣量J=0.15kg·m2,電阻R=2.65Ω。
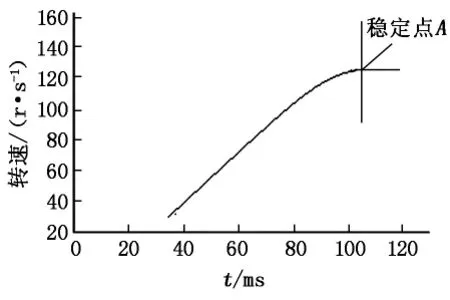
圖2 電機轉速-時間關系圖
將通過理論計算得到的時間-轉速曲線和實際測量得到的時間-轉速曲線進行比較,可以得到一個當速度由上升過程逐漸趨于穩定的穩定點A,A點表示電機已經完全啟動,速度達到穩定狀態。從施加全壓啟動到A點這個時間點,如果測得的電機轉速不小于A點速度,則認為電機啟動過程到這一時刻為止運行正常。如果電機從全壓啟動,經過T時間段,轉速測量值小于曲線上A點的轉速值,則認為電機啟動過程發生堵轉,應立即停止啟動過程,然后電機反轉,將紙推出。
為了更準確地判斷啟動過程,可以在整個啟動過程中設置若干個轉速判斷點,并將實際啟動過程中的轉速值和這些轉速點比較,如果超出預設范圍則認為發生堵轉。但是由于碎紙機功能單一,對電動機的性能要求不高,所以只需設置一個轉速判斷點即可。
電機測速傳感器可以采用簡便的光電傳感器或霍爾傳感器,傳感器直接輸出轉子的轉速脈沖信號,經過快速光電耦合電路使輸入信號與主電路隔離。經隔離后的轉速脈沖信號經過調理,成為標準的TTL電平脈沖信號,輸入到單片機的IO腳,再由單片機對轉速信號分頻及周期測量,從而得出電機的轉速值。
4 電機堵轉試驗
針對電機堵轉過程,本文在碎紙機上進行了一系列的試驗,所用電機為YY5550型單相異步電動機,電機參數如下:輸出功率51W,電壓220V,頻率50Hz,額定轉速1 300r/min,最大扭矩0.29N·m,電容5μF。
圖3 為采用示波器實際測得的電機正常啟動過程波形。從圖3 中可知,電機經過約140ms后達到平穩狀態,啟動過程快。圖4 為采用示波器實際測得的電機發生堵轉時轉子波形,電機速度上升過程中存在爬行現象。比較圖3 和圖4 可知,從電機啟動過程波形可以明顯地判別電機啟動過程是否發生堵轉。
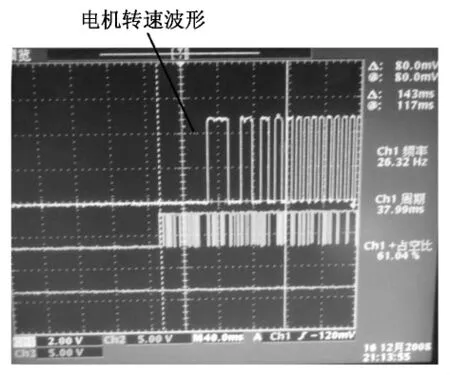
圖3 電機正常啟動波形
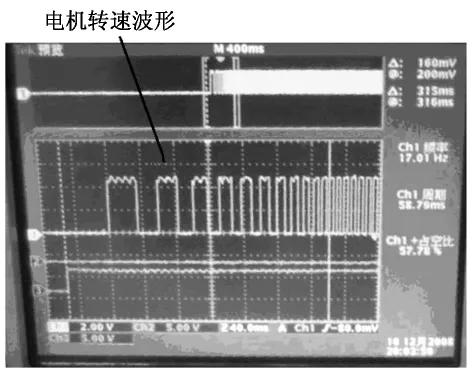
圖4 電機堵轉啟動波形
5 結論
本文分析了異步電動機速度上升過程的動態方程,得出了堵轉保護的方法,將此電機堵轉保護方法應用于碎紙機,達到了預期的試驗效果。
[1]劉民富.異步電機智能綜合保護器的設計[J].黑龍江科技信息,2011(21):94.
[2]李松濤,李俊,林錦國.基于PIC單片機為內核的電機保護器的研制[J].機床與液壓,2009(6):238-240.
[3]馮崇智.基于DSP的異步電動機保護裝置的研制與開發[D].天津:天津大學,2004:8-14.
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56