基于無線傳感器網(wǎng)絡(luò)的油田火災(zāi)定位技術(shù)研究
2013-07-25 02:28:58齊懷琴花曉慧
計算機工程與設(shè)計 2013年2期
關(guān)鍵詞:信號
齊懷琴,花曉慧
(齊齊哈爾大學(xué)通信與電子信息工程學(xué)院,黑龍江齊齊哈爾161006)
0 引言
我國油田主要開采對象為石油和天然氣,涉及到二者的勘探、采集和運輸?shù)燃夹g(shù)環(huán)節(jié)。油田建筑物包括采油井、運輸管道和存儲廠房等,上述建筑物周圍環(huán)境中存在揮發(fā)的烴類化合物,極易發(fā)生火災(zāi)。油田火災(zāi)主要由于油田內(nèi)部及附近的的明火或暗火引起,一旦發(fā)生火災(zāi),損失巨大。當(dāng)發(fā)生火災(zāi)時,如何快速準確地定位到火源點,進而實施滅火,顯得尤為重要。在傳統(tǒng)的火災(zāi)監(jiān)測技術(shù)中,發(fā)生火災(zāi)采用全局灑水方法,這樣不但沒有針對重點區(qū)域,而且浪費水資源。鑒于上述缺點,火災(zāi)定位技術(shù)成為油田火災(zāi)監(jiān)測重點需要解決的問題。傳統(tǒng)的火災(zāi)定位技術(shù)多采用TOA技術(shù)、TDOA技術(shù)或AOA技術(shù),這些方法由于自身缺點,并不適用于油田火災(zāi)定位,而且大多數(shù)技術(shù)研究僅停留在理論分析層面,對具體處理流程很少提及。針對上述提及的各種問題,提出了適合油田火災(zāi)的偽碼測距定位技術(shù),并給出了具體實現(xiàn)流程和基于Matlab仿真方案。仿真結(jié)論顯示,偽碼測距定位技術(shù)能夠更好地滿足油田具體環(huán)境狀況及特定需求指標,具有良好的應(yīng)用前景及推廣價值。
1 油田火災(zāi)監(jiān)測系統(tǒng)設(shè)計
采用無線傳感器網(wǎng)絡(luò)[1](Wireless sensor network)進行火災(zāi)監(jiān)測,可以在油田中隨機布置節(jié)點,各個節(jié)點通過無線通信實現(xiàn)自組織。在獲取周圍環(huán)境的信息后,形成分布式自組織系統(tǒng),通過相互協(xié)同完成火災(zāi)檢測任務(wù)。在油田火災(zāi)檢測系統(tǒng)中,主要系統(tǒng)結(jié)構(gòu)如圖1所示。
在油田內(nèi),散布大量的無線傳感器[2]。無線傳感器分為傳感器節(jié)點和匯聚節(jié)點兩部分。傳感器節(jié)點隨機分布,匯聚節(jié)點位置已知,如圖2所示。其中,黑色代表匯聚節(jié)點,白色代表傳感器節(jié)點。
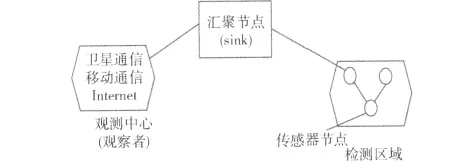
圖1 油田傳感器網(wǎng)絡(luò)體系結(jié)構(gòu)
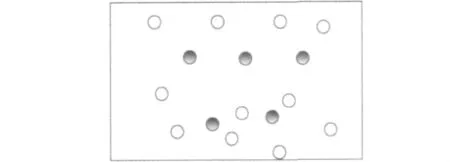
圖2 油田傳感器節(jié)點和匯聚節(jié)點
當(dāng)油田內(nèi)某區(qū)域發(fā)生火災(zāi)時,傳感器進行報警,并將報警信號發(fā)送到匯聚節(jié)點,匯聚節(jié)點接收到報警信號后,通過網(wǎng)絡(luò)或其他手段,將其傳遞至觀測中心。觀測中心根據(jù)接收到的報警信號,定位到具體發(fā)送報警信號的傳感器節(jié)點[3]。
2 油田定位技術(shù)研究
2.1 油田定位技術(shù)選擇
在油田火災(zāi)監(jiān)測系統(tǒng)中節(jié)點定位技術(shù)是整個系統(tǒng)的技術(shù)核心。目前,已有大部分定位算法包括時間差 (TDOD)測距法、到達角 (AOA)定位法、信號強度測距 (RSSI)法等。
TDOA方法主要原理是測量無線發(fā)射信號與其他信號的時間差。如圖3所示,依照電磁波和聲波兩種波形在空氣中傳播速度不同實現(xiàn)。由于兩種波形傳播速度不同,接收時間也會出現(xiàn)差別。計算接收節(jié)點接收信號的時間差,從而計算得到距離值。
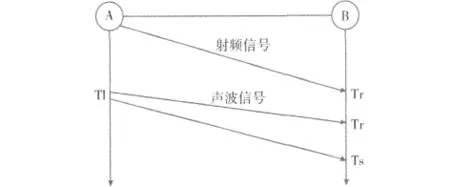
圖3 TDOA測距技術(shù)
該方法的優(yōu)點為精度高,可達到厘米水平,缺點為受距離限制。因為聲波傳輸距離有限,如果超出了聲波傳輸距離,就不能用這種方法了。
AOA方法不但可以測得節(jié)點的距離,還可以測量目標節(jié)點和測距節(jié)點之間的方向,且方向精度很精確。但該方法有效范圍為40度,即目標節(jié)點和測距節(jié)點之間的角度范圍應(yīng)該在40度以內(nèi)。
RSSI方法測量能量的損失,從而計算得到距離的信息。目標節(jié)點發(fā)射一定信號強度信號,假設(shè)發(fā)射前信號的強度為A,經(jīng)傳輸之后,在測距節(jié)點接收到該信號。由于距離的傳輸,該信號的能量會出現(xiàn)損失。假設(shè)接收到信號能量為B,該信號通過傳輸損失的能量為C=A-B。通過傳輸介質(zhì)的傳輸參數(shù),計算得到距離。優(yōu)點是操作簡單,并不需要很多的算法支撐,只需要測量信號強度的差別就可以了,缺點是精度差。
傳統(tǒng)測距手段缺點[4]:
(1)定位運算分辨不同節(jié)點的能力弱。在定位運算過程當(dāng)中,同時有多個傳感器節(jié)點發(fā)送信號到匯聚節(jié)點,匯聚節(jié)點需要分辨哪個信號是哪個節(jié)點發(fā)射出來,這是現(xiàn)在算法的薄弱環(huán)節(jié)。
(2)抗干擾能力弱。接收到信號具有很低的信噪比SNR,系統(tǒng)可能無法工作,只有當(dāng)SNR足夠大時,才可以檢測到信號。
(3)距離不可調(diào)。假如傳感器節(jié)點與匯聚節(jié)點之間的可檢測距離范圍為S,那么S就已經(jīng)確定,如果想改變S大小,只有通過增加發(fā)射端的發(fā)射功率,但是加大發(fā)射端功率的代價是很大程度增加發(fā)射端的硬件復(fù)雜度。
(4)精度不可調(diào)。系統(tǒng)設(shè)計完成,精度固定。需要調(diào)整精度時,只能通過調(diào)整硬件組成實現(xiàn)。
針對上面所說的各種缺點,提出了偽碼測距定位技術(shù)[5],可以逐一解決傳統(tǒng)測距手段所遇到的問題。
(1)不同節(jié)點定位分辨能力強。因為偽碼的自相關(guān)峰值大,且互相關(guān)峰值小。當(dāng)接收多路偽碼信號后,每路信號有各自對應(yīng)偽碼。根據(jù)偽碼特性,只需要在基站節(jié)點中運用相應(yīng)偽碼與輸入信號作相關(guān)運算,便可辨別得到相應(yīng)偽碼對應(yīng)節(jié)點,即通過自相關(guān)值定位到是具體哪個節(jié)點發(fā)射的信號,從而得到該節(jié)點與匯聚節(jié)點之間的距離。由于自相關(guān)的峰值遠大于互相關(guān)的峰值,所以其他偽碼對本碼的影響很小。
(2)抗干擾能力強。根據(jù)香農(nóng)定理,在信道容量一定的情況下,偽碼可以很大程度的增加信號的帶寬,這樣可以降低對信噪比SNR的要求,在信噪比很低的情況下,依然可以工作。
(3)距離可調(diào)。由于在偽碼運算中,每一個碼片對應(yīng)的距離是固定的,如果想要增加距離,只需要增加一個碼周期的碼片數(shù)便可,從而大大降低了對原系統(tǒng)的修改程度。
(4)精度可調(diào)。在運算過程中,精度是依靠碼片對應(yīng)碼相位精度決定的。可以通過工作時鐘的變化,控制不同碼相位精度。而且如果希望得到更精確的碼相位值,在運算程序后面加入碼跟蹤環(huán)處理,可以大大提升精度。而且重要的是,這里所提及的各種改變精度的方法都是限制在基站內(nèi)FPGA程序的改變,而與硬件無關(guān),所以可以大大提升系統(tǒng)的適應(yīng)能力。
綜上所述,這里選擇偽碼測距定位技術(shù),根據(jù)偽碼自身的特點,克服前面所說各種方法的缺點,從而更好地實現(xiàn)測距的功能,并應(yīng)用到油田環(huán)境中實現(xiàn)火災(zāi)定位。
2.2 油田環(huán)境中的偽碼測距定位技術(shù)
三邊定位技術(shù):本文采用三邊定位技術(shù),實現(xiàn)傳感器節(jié)點的定位。三邊測量法[6]的原理如下:

圖4 三邊測量法
假設(shè)節(jié)D的坐標表示為 (x,y),那么,存在下列公式
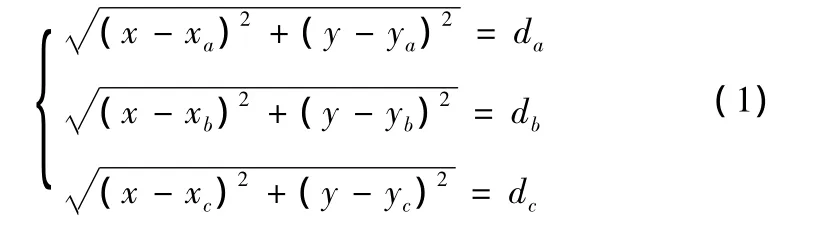
可以得到節(jié)點D的坐標為

偽碼定位原理:首先,觀測中心通過輸入的偽碼和本地偽碼做自相關(guān)運算,得到碼相位值n。由于偽碼每周期是有N個碼片組成的,碼片可以測量的距離固定C_code。通過碼相位值n和單個碼片測量距離C_code的乘積,得到測量的距離值[7]。具體解釋為:
(1)計算單個碼片測量的距離
首先假設(shè):碼片頻率為F1;每個碼片周期含有碼片數(shù)為N;光速為C。即分析如下:
1)計算碼片周期T。
因為碼片頻率為F1,并且每個碼片周期含有的碼片數(shù)為N,可以得到,碼片周期

2)計算整個碼周期的測量距離S
碼片傳輸速度與光速時相同的。則在一個碼周期T時間內(nèi),碼片共走動距離S為

3)得到單個碼片代表的距離C_code
整個碼片周期代表的距離為C,并且一個碼周期共有碼片數(shù)為N,故一個碼片代表的距離C_code為

(2)得到實際測量的距離
根據(jù)偽碼相關(guān)運算的原理,得到碼相位值,即輸入偽碼和本地偽碼的相位差。由于偽碼在發(fā)射端,是與本地偽碼完全相同的,即兩個碼片相位完全對準的,自相關(guān)的峰值應(yīng)該出現(xiàn)在1的位置。但是現(xiàn)在接收到偽碼后,與本地偽碼自相關(guān),得到的自相關(guān)峰值不在1的位置,而是發(fā)生了一定的偏移,這個偏移就是因為傳輸距離引起的。假設(shè)偏移后的碼相位為n,則通過兩組偽碼相位差得到的兩個節(jié)點之間的距離s_get為

C_code為前面所計算的每個碼片代表的距離。
綜上所述,偽碼定位技術(shù)關(guān)鍵為求得碼片自相關(guān)后的碼相位值。
油田火災(zāi)定位系統(tǒng)結(jié)構(gòu):該系統(tǒng)目的為實現(xiàn)油田中無線傳感器節(jié)點的定位。具體結(jié)構(gòu)如圖5所示。
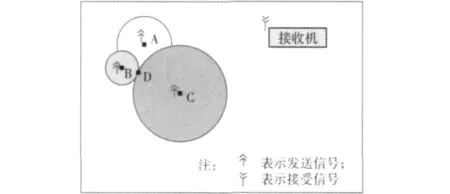
圖5 定位結(jié)構(gòu)
當(dāng)油田內(nèi)傳感器節(jié)點D滿足火災(zāi)報警條件,發(fā)送偽碼信息至匯聚節(jié)點A、B和C。匯聚節(jié)點A、B和C轉(zhuǎn)發(fā)報警信號到觀測中心。觀測中心接收到匯聚節(jié)點A、B、C信息后,根據(jù)偽碼性質(zhì),換算得到該發(fā)射偽碼的傳感器節(jié)點D距離三個匯聚節(jié)點A、B和C的距離。由于匯聚節(jié)點位置已知,根據(jù)三邊定位技術(shù),實現(xiàn)對傳感器節(jié)點D的定位。從而實現(xiàn)報警無線傳感器節(jié)點的定位[8]。
3 油田定位系統(tǒng)仿真分析
3.1 油田定位系統(tǒng)仿真流程
本節(jié)主要說明相關(guān)運算的過程。
自相關(guān)公式為


這里把相關(guān)過程在頻域中運算,時域中的自相關(guān)等于頻域中的共軛相乘。在頻域中計算要比在時域中計算節(jié)省時間,而火災(zāi)檢測時間是一個重要指標,所以這里選擇在頻域中計算。
運算過程如圖6所示。
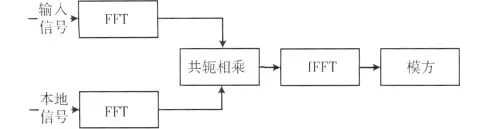
圖6 油田定位系統(tǒng)原理框架
具體操作流程為:
(1)FFT處理。時域相關(guān)相當(dāng)于頻率相乘,相乘的兩個變量即為輸入信號的頻譜和本地偽碼頻譜。
(2)共軛復(fù)乘。把輸入信號的FFT和本地偽碼FFT共軛相乘后,得到二者相關(guān)值的頻譜。
(3)IFFT。對復(fù)乘的結(jié)構(gòu),即對二者相關(guān)值頻譜的結(jié)果,做IFFT處理,得到二者時域中的值。
(4)模方。由于IFFT的結(jié)果既有實部也有虛部。如果單獨用實部或者單獨用虛部都不會達到需要得到的自相關(guān)值,因為在時域中看來,相關(guān)值都是實數(shù),而沒有虛部的存在。所以這里,需要把得到的IFFT的值通過模方的處理,得到實數(shù)。這里得到的實數(shù)即為相關(guān)的結(jié)果,可以通過得到的相關(guān)結(jié)果的值,做相應(yīng)的處理,得到需要得到的測量距離的功能[9-10]。
3.2 油田定位系統(tǒng)仿真結(jié)果
當(dāng)輸入為全信號時,即沒有噪聲存在時,得到的自相關(guān)值如圖7所示。
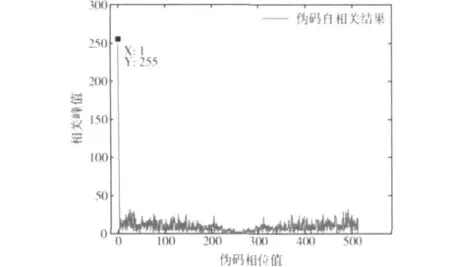
圖7 偽碼相位值
由于輸入信號的偽碼和本地生成偽碼是完全相同的,所以相關(guān)結(jié)果的峰值應(yīng)該在第一點處。隨著輸入信號和本地產(chǎn)生偽碼的碼相位不同,這里的峰值跟隨著改變,所以可以根據(jù)峰值具體對應(yīng)的相位值,得到輸入偽碼和本地偽碼相位差,從而根據(jù)相位差值得到需要測量的距離值。但是,沒有噪聲干擾是不可能存在的,下面我們討論油田噪聲干擾的范圍。
當(dāng)外界有干擾時,自相關(guān)結(jié)果中,相應(yīng)的峰值以外的值會上升,而信號的峰值也會改變,這里仿真了SNR=-5dB時的相關(guān)波形,得到的結(jié)果如圖8所示。
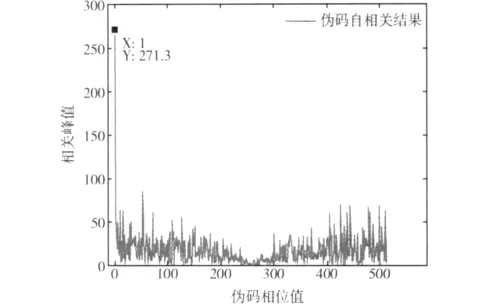
圖8 偽碼相位值
如果再降低SNR,得到當(dāng)SNR為-10dB時,得到的結(jié)果如圖9所示。
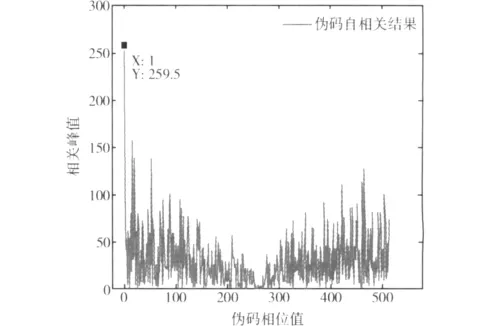
圖9 偽碼相位值
噪聲的干擾已經(jīng)很大,如果再降低SNR,仿真了SNR不同得到的波形。標記最大值點后,如圖10所示。
由圖形可看出,當(dāng)SNR為-20dB時,具體的自相關(guān)鑒別方法失去意義,因為噪聲過大,使得噪聲的值超過信號的峰值,信號淹沒在噪聲中。所以得到,偽碼雖然可以有效的抑制噪聲的影響,提高頻率工作靈敏度,使其能夠在很低SNR情況下工作,但是并不是可以無限降低SNR,當(dāng)SNR為-20dB左右時,偽碼自相關(guān)方法得到的峰值已經(jīng)淹沒在噪聲之中,無法正確得到信號值。所以,該算法要保證SNR在-15dB以上,而油田中的噪聲范圍恰好在-15dB以上,因此,該算法適合在此范圍內(nèi)應(yīng)用。
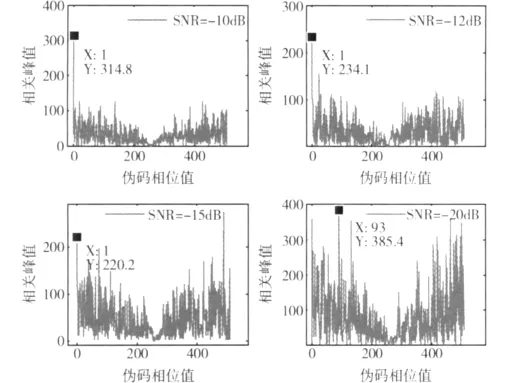
圖10 偽碼相位值
4 結(jié)束語
本文針對已有火災(zāi)定位算法缺點,提出新的定位技術(shù),把偽碼技術(shù)成功的應(yīng)用到油田火災(zāi)定位系統(tǒng)中,實現(xiàn)了火災(zāi)定位范圍內(nèi)的技術(shù)創(chuàng)新。通過系統(tǒng)設(shè)計,實現(xiàn)傳感器節(jié)點和匯聚節(jié)點的功能分配,給出具體應(yīng)用偽碼定位技術(shù)實現(xiàn)油田火災(zāi)定位的總體規(guī)劃。通過本論文對偽碼定位技術(shù)的理論分析和具體仿真驗證,不但彌補了已有定位算法的缺點,而且總結(jié)了本算法的優(yōu)點,提高了該算法的適應(yīng)能力。使得偽碼定位技術(shù),不但適合于油田火災(zāi)定位,還可以適用于森林或者溫室等多個領(lǐng)域,為定位技術(shù)的應(yīng)用領(lǐng)域提供了有利的支撐,具有很好的應(yīng)用前景及推廣價值。
[1]WANG Yang.A research on the localization technology of wireless sensor networks[D].Hefei:University of Science and Technology of China,2007:9-11(in Chinese).[汪煬.無線傳感器網(wǎng)絡(luò)定位技術(shù)研究 [D].合肥:中國科學(xué)技術(shù)大學(xué),2007:9-11.]
[2]WANG Xiaoping.A research on localization in wireless sensor networks[D].Changsha:National University of Defense Technology,2010:1-7(in Chinese).[王小平.無線傳感器網(wǎng)絡(luò)定位技術(shù)研究[D].長沙:國防科學(xué)技術(shù)大學(xué),2010:1-7.]
[3]WANG Jiangang,WANG Fubao,DUAN Weijun.Application of weighted least square estimates on wireless sensor network node localization [J].Application Research of Computers,2006,23(9):41-43(in Chinese).[王建剛,王福豹,段渭軍.加權(quán)最小二乘估計在無線傳感器網(wǎng)絡(luò)定位中的應(yīng)用[J].計算機應(yīng)用研究,2006,23(9):41-43.]
[4]SONG Chunyang.Self-localization technologies for wireless sensor network nodes[J].Popular Science & Technology,2010(9):36-37(in Chinese).[宋春陽.無線傳感器網(wǎng)絡(luò)的節(jié)點自定位技術(shù) [J].大眾科技,2010(9):36-37.]
[5]SUN Limin,LI Jianzhong,CHEN Yu.Wireless sensor network[M].Beijing:Tsinghua University Press,2005(in Chinese).[孫利民,李建中,陳渝.無線傳感器網(wǎng)絡(luò)[M].北京:北京清華大學(xué)出版,2005.]
[6]WANG Shu,YAN Yujie,HU Fuping.Theory and applications of wireless sensor networks[M].Beijing:Beihang University Press,2007(in Chinese).[王殊,閻毓杰,胡富平.無線傳感器網(wǎng)絡(luò)的理論與應(yīng)用[M].北京:北京航空航天大學(xué)出版社,2007.]
[7]CHEN Juan.The exploitation of localization system based on mobile beacon[D].Changsha:Central South University,2009:7-9(in Chinese).[陳娟.基于移動信標的無線傳感器網(wǎng)絡(luò)定位算法研究[D].長沙:中南大學(xué),2009:7-9.]
[8]QU Liang.The exploitation of localization system based on wireless sensor networks[D].Shenyang:Northeastern University,2008:5-15(in Chinese).[曲亮.無線傳感器網(wǎng)絡(luò)定位系統(tǒng)的開發(fā)[D].沈陽:東北大學(xué),2008:5-15.]
[9]YU Jianping.Study and realization on localization technology based on wireless sensor network[D].Hangzhou:Hangzhou Dianzi University,2010(in Chinese).[俞建平.基于無線傳感器網(wǎng)絡(luò)的定位技術(shù)研究與實現(xiàn)[D].杭州:杭州電子科技大學(xué),2010:1-7.]
[10]LIU Lijun.Study on localization technology based on wireless sensor network[D].Dalian:Dalian University of Technology,2009:2-15(in Chinese).[劉麗君.無線傳感器網(wǎng)絡(luò)定位算法的研究[D].大連:大連理工大學(xué),2009:2-15.]
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06