基于單片機(jī)的數(shù)字傾角檢測(cè)系統(tǒng)的設(shè)計(jì)
2013-07-30 04:06:46林建華
電子測(cè)試 2013年9期
關(guān)鍵詞:單片機(jī)
林建華
(北京信息科技大學(xué)理學(xué)院,北京 100101)
0 引言
隨著科技的發(fā)展,對(duì)角度測(cè)量技術(shù)的要求也越來越高。傳統(tǒng)的機(jī)械式和電磁式傾角傳感器的制作成本較低,但是其設(shè)備體積大、精度低、響應(yīng)時(shí)間長、動(dòng)態(tài)特性差,不適合用于對(duì)傳感器要求體積小、精度高、零點(diǎn)漂移小的領(lǐng)域的角度檢測(cè)。為此,需要研制一種便攜式的數(shù)字傾角傳感系統(tǒng)。本文利用基于MEMS 技術(shù)的傾角傳感器SCA103T 和MSC1214單片機(jī)組合,通過硬件電路設(shè)計(jì)和軟件補(bǔ)償?shù)姆椒▽?shí)現(xiàn)的傾角傳感器,并對(duì)它的主要性能進(jìn)行測(cè)試。
1 傾角檢測(cè)原理
傾角傳感器SCA103T 是利用MEMS 工藝以單晶硅材料制造的高精度單軸傾角傳感器[1],由三層硅片形成立體結(jié)構(gòu),當(dāng)傾斜或者有加速度的時(shí)候,中間質(zhì)量片會(huì)傾斜向某一側(cè),從而兩側(cè)的電容發(fā)生改變。改傾角傳感器是基于重力加速度的原理制作的,因?yàn)橹亓铀俣萭的方向始終豎直向下,當(dāng)重力加速度與水平面相互垂直時(shí),可知重力加速度在水平方向上不存在分量,當(dāng)重力加速度和水平面之間存在一定的夾角時(shí),那么重力加速度在這個(gè)平面上就存在投影的分量。
如圖1所示,根據(jù)加速度感應(yīng)軸上的重力加速度分量,可以通過計(jì)算轉(zhuǎn)換得到平面的傾角。傾角傳感器的輸出和重力加速度之間存在下列的關(guān)系:

傳感器角度至電壓的轉(zhuǎn)換采用以下的公式:

其中α為傾角,式中Vout為電壓差分輸出值,V0為傾角為0o時(shí)電壓差分輸出值,一般為0V,K為傳感器的靈敏度,由公式(2)可得

2 硬件電路的設(shè)計(jì)
該測(cè)角度檢測(cè)系統(tǒng)是以MEMS 傳感器SCA103T 作為前端角度測(cè)量器件,SCA103T 輸出通道輸出范圍為+0.25V~+4.75V的直流信號(hào),經(jīng)差動(dòng)運(yùn)算放大器得到輸出范圍為-5V~+5V的穩(wěn)定信號(hào),經(jīng)過濾波處理后再輸入雙極性的A/D 轉(zhuǎn)換器。利用單片機(jī)對(duì)A/D 芯片轉(zhuǎn)換后的數(shù)字信號(hào)進(jìn)行處理[2]。采用串口芯片實(shí)現(xiàn)單片機(jī)和計(jì)算機(jī)之間的通訊,通過軟件編程對(duì)處理器發(fā)出命令,進(jìn)行數(shù)據(jù)采集、存儲(chǔ)、補(bǔ)償算法實(shí)現(xiàn)、輸入、輸出顯示等操作。角度檢測(cè)硬件系統(tǒng)的實(shí)現(xiàn)框圖如圖2所示。

圖1 傾角傳感器工作原理圖
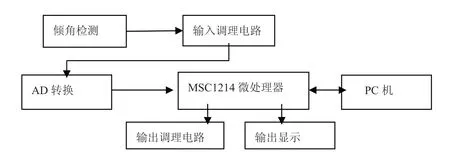
圖2 硬件系統(tǒng)實(shí)現(xiàn)框圖
3 單片機(jī)軟件補(bǔ)償技術(shù)的實(shí)現(xiàn)
傳統(tǒng)的硬件補(bǔ)償方法調(diào)試比較困難,成本也比較高,因此采用軟件補(bǔ)償。單片機(jī)數(shù)字補(bǔ)償[3]是指利用單片機(jī)系統(tǒng)對(duì)傾角傳感器的敏感信號(hào)進(jìn)行A/D 轉(zhuǎn)換后,利用數(shù)字系統(tǒng)進(jìn)行實(shí)時(shí)處理,通過編寫數(shù)字處理算法,以實(shí)現(xiàn)數(shù)字化補(bǔ)償。由于制作傳感器的半導(dǎo)體材料對(duì)溫度往往比較敏感,會(huì)受到環(huán)境溫度、電源噪聲的影響而產(chǎn)生零點(diǎn)漂移。為了克服環(huán)境溫度的變化引起的零點(diǎn)漂移,需要對(duì)傳感器做溫度補(bǔ)償。首先測(cè)量出該傳感器在各個(gè)溫度點(diǎn)下所對(duì)應(yīng)的零位輸出電壓。通過采樣把所得到的數(shù)據(jù)通過曲線擬合的方法得到零位輸出和溫度之間的函數(shù)關(guān)系式,計(jì)算出補(bǔ)償值,建立零位輸出—溫度參數(shù)表。在對(duì)傾角傳感器做線性度補(bǔ)償時(shí),在光學(xué)分度頭上測(cè)量出傾角傳感器在各個(gè)角度下所對(duì)應(yīng)的輸出電壓,通過最小二乘法對(duì)傳感器進(jìn)行線性補(bǔ)償。在傾角傳感器工作時(shí),通過編寫軟件算法定時(shí)地對(duì)輸出的溫度數(shù)據(jù)進(jìn)行采樣,經(jīng)過查表獲得相對(duì)應(yīng)于該溫度點(diǎn)的零位輸出電壓的補(bǔ)償值來以達(dá)到傳感器的零位輸出—溫度的補(bǔ)償。然后講溫度補(bǔ)償后的輸出值,通過查表做相應(yīng)角度下的線性度補(bǔ)償。把軟件補(bǔ)償后的輸出值通過單片機(jī)的D/A 轉(zhuǎn)換來得到輸出的模擬電壓,最后通過輸出調(diào)理電路得到用戶需要的輸出電壓值。
4 單片機(jī)的補(bǔ)償結(jié)果
利用軟件補(bǔ)償后后,傳感器的零位輸出和線性度得到較大的提高,對(duì)軟件補(bǔ)償前后的零位電壓和線性度分別做對(duì)比得到如圖3、圖4所示的曲線。

圖3 傳感器零位電壓補(bǔ)償前后對(duì)比

圖4 傳感器線性度補(bǔ)償前后
5 傳感器性能測(cè)試
傾角傳感器測(cè)試的主要儀器是光學(xué)分度頭,傳感器的常規(guī)電性能測(cè)試主要包括測(cè)量范圍、零位電壓、線性度、靈敏度、零點(diǎn)漂移,并按照傾角傳感器的測(cè)試方法進(jìn)行測(cè)試。
5.1 測(cè)量范圍及零位電壓的測(cè)試
將傾角傳感器安裝于光學(xué)分度頭上,并調(diào)至水平位置,接通電源,在輸出端接上數(shù)字電壓表,1min 后,記錄滿量程時(shí)的輸出值,與設(shè)計(jì)值之差對(duì)應(yīng)的電壓應(yīng)在±100mv 內(nèi)。再將分度頭調(diào)到水平位置,讀出此時(shí)的輸出即為零位電壓。
5.2 非線性與靈敏度測(cè)試
將傳感器安裝于光學(xué)分度頭上,并調(diào)至水平位置,接通電源,在輸出端接上數(shù)字電壓表,檢測(cè)零位輸出電壓,然后使傳感器傾斜一定角度傾角,分別為30°,20°,10°,5°,0°-5°,-10°,-20°,-30°,記錄輸出信號(hào),利用校準(zhǔn)數(shù)據(jù)求出最小二乘法就能得到非線性度和靈敏度。
5.3 零點(diǎn)漂移的測(cè)試
將傳感器置于已精確校平的分度頭上,接通電源,在輸出端接上數(shù)字電壓表,1min 后首次記錄傳感器的零位電壓輸出值Vout1,保持通電1小時(shí)后再次記錄傳感器零位電壓輸出值Vout2。計(jì)算|Vout2-Vout1|兩個(gè)零位電壓差值的絕對(duì)值應(yīng)該滿足指標(biāo)要求。
6 測(cè)試結(jié)果
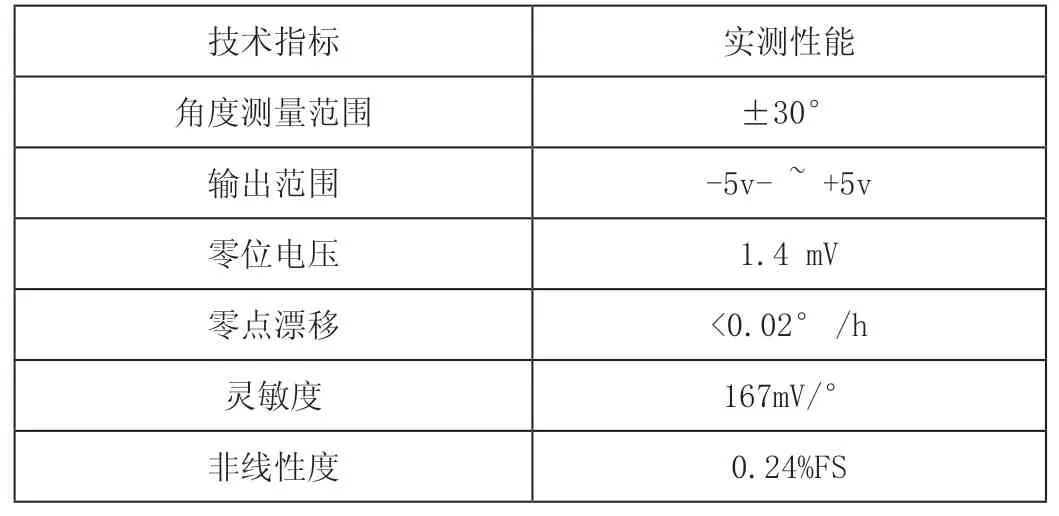
表1 傳感器測(cè)試達(dá)到的性能指標(biāo)
7 結(jié)論
(1)該水平傾角傳感器線性度好、輸出穩(wěn)定,測(cè)量精度較高、零點(diǎn)漂移小。它可以作為一個(gè)單獨(dú)的數(shù)字輸出傳感器,也可以作為一個(gè)測(cè)量模塊嵌入到測(cè)量控制系統(tǒng)中,有較廣闊的應(yīng)用前景。
(2)利用數(shù)字化的補(bǔ)償技術(shù)使傳感器的性能得到很大的提高。
[1]施云貴.基于SCA103T 實(shí)現(xiàn)的高精度傾角檢測(cè)系統(tǒng)設(shè)計(jì)[J].吉林化工學(xué)院學(xué)報(bào),2008,25(3),68-69
[2]王旭,傲日格樂,陳紹英.減小傳感器放大器零點(diǎn)漂移的電路設(shè)計(jì)[J].呼倫貝爾學(xué)院學(xué)報(bào),2010,18(5),87-89
[3]張偉,樸林華,林宇,張福學(xué).氣體擺式水平傾角傳感器的結(jié)構(gòu)及信號(hào)處理[J].電子元件與材料.2005,8.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設(shè)計(jì)工程(2015年15期)2015-02-27 12:07:30
電子設(shè)計(jì)工程(2015年8期)2015-02-27 12:05:36
