基于OpenGL三維地形構建技術研究
2013-08-06 15:26:02汪明
城市勘測 2013年1期
汪明
(重慶市勘測院,重慶 400020)
1 引言
在解決大規模地形數據三維可視化和實時繪制的問題中,國內外許多學者都進行了廣泛、深入的研究,主要集中于地形和紋理數據的分頁管理、紋理數據和地形數據的LOD控制、可見域的裁剪等多個方面。此外,隨著圖形處理器(Graphic Processing Unit,GPU)性能的提高,出現了基于硬件GPU的粗粒度的離散層次細節方法[1]。
本文擬研究基于OpenGL的大規模地形三維地形構建關鍵技術。由于高分辨率的DTM或DEM的數據集龐大,若直接使用原始數據進行可視化,則需要繪制的三角形或四邊形將達到上百萬個。因此,為了防止顯示滯后,緩解內存和顯卡緩存的壓力,需要考慮以下幾個方面:對復雜的地形做數據簡化處理;三維地形數據LOD構建等。
2 三維地形構建技術算法及實現
本文基于多分辨率高程數據文件的層次細節構建地形,主要思想是對大范圍的DEM數據先做預處理,即裁剪分層(見3.1)。由于文件按行列組織,因此某一塊的索引則為i*m+j(i為行號,j為列號,m為列數)。我們只讀取和顯示在可視范圍內的文件塊,這解決了把DEM數據全部讀入內存而實際只需要顯示地形中很小一部分的矛盾。
2.1 高程數據組織方法
本文中三維地形的構建,將采用多層次文件的形式存儲與讀取數據,而Esri的GIRD數據卻在保存上稍顯復雜,為了簡化存儲與后期處理的方便,將采用自定義文件存儲方法,對數據進行多層次組織與保存。
如圖1所示,A為低層級數據L,它所存儲的當前層級下的數據相對于高層級下的數據B(級別L-1)來說,其存儲范圍為2×2個B層級數據,但是A的分辨率只有B的1/4。A和B均為所在層級下的一個文件,而DEM數據由很多個這樣的文件組成,而且不管是同一層級還是不同層級,每個文件的大小一樣(除去邊緣上不足塊文件柵格數的文件)。本文采用每塊文件柵格數為長寬均為256,文件大小為“長×寬×浮點數長度”,浮點數為4個字節,即文件存儲大小為256×256×4=262144Byte=256kb。所分層級總數是按照如下公式計算得出:

每一層級(level)文件中相對于源文件重采樣點的間隔數XYDiff為:

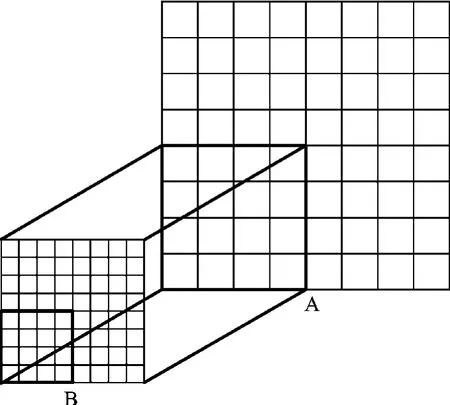
圖1 分級數據示意圖
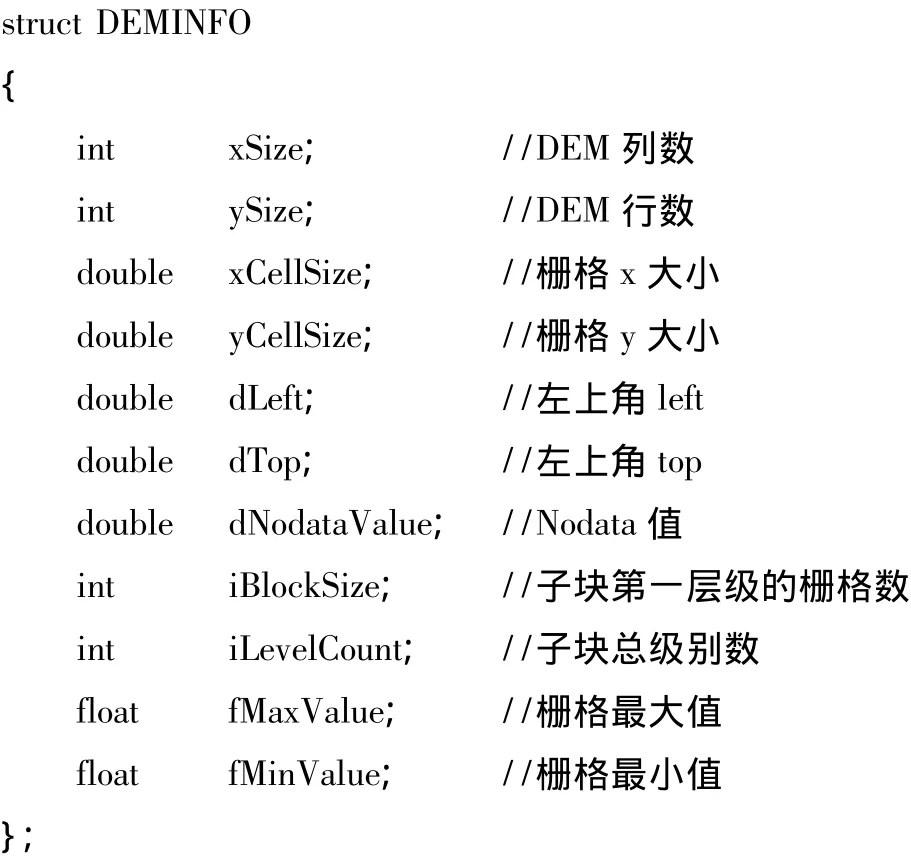
在保存文件時,采用每一層級存放在單獨文件夾下面,每一層級文件夾下有多個文件塊,分別代表當前級別下256×256個柵格的數據。如圖1中A和B中的紅色框。每塊數據以二進制格式寫入文件,后綴名為.bk,文件命名方式為:“當前級別_所在行號_所在列號.bk”,如圖1中A級別為L,并在i行j列,因此在級別為L的文件夾下,有文件名為L_i_j.bk。在L同級文件夾中包含一個cfg.cfg的二進制文件,其中包含了DEM的頭文件信息,結構體如下:
如果要對所構建的地形進行補縫,則需要在生成數據時在每個塊文件中插入相鄰的最后一行(列)的數據,即數據需要有重疊部分,如圖2中D包含了B有重疊行,而和C有重疊列。
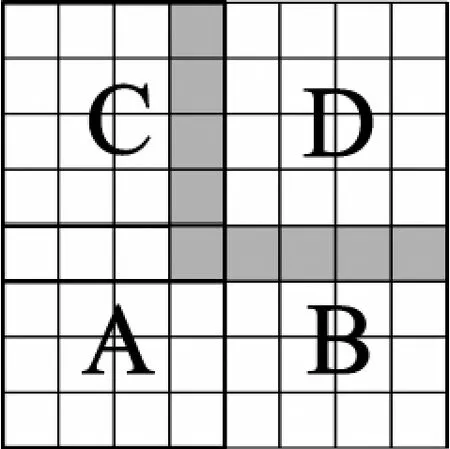
圖2 補縫數據分塊示意圖
2.2 數據裁剪及重采樣
數據的裁剪程序使用了GDAL函數庫中的重采樣方法:
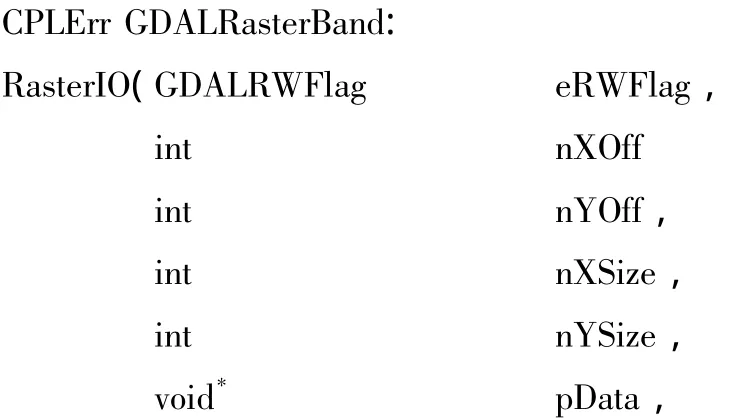
該函數中,nXOff、nYOff表示讀取柵格的起始行列;nBufXSize、nBufYSize表示讀取柵格的行列數。
通過設定這4個參數,可以實現柵格數據的剪裁和重采樣。
2.3 三維地形構建算法
(1)分塊分級的地形構建算法
在地形數據分級存儲的基礎上,確定觀察點與觀察目標點后,可以根據視點(Object)到觀察(Target)點的距離計算出當前讀入數據所需要的文件級別以及當前的視域。為保證三維地形顯示與DEM大小無關,規定顯示的地形最多只能是觀察點及其周圍8個文件塊。這樣當讀入文件都在同一級別時,讀入內存的數據最多為256×9 kb,從而在內存方面保證了實現海量數據的實時快速地形構建的可行性。
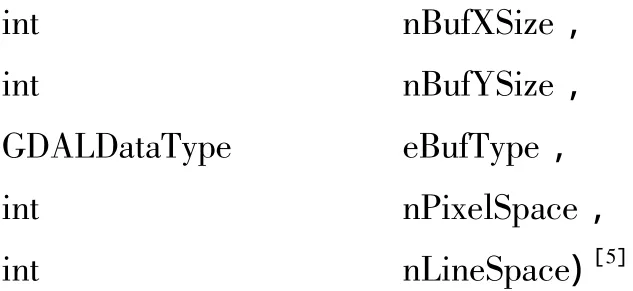
在地形顯示時,為保證地形顯示的效果,讀取文件時,不一定只讀取一個級別的文件,而更多的是通過四叉樹與級別判定公式讀取當前顯示塊、當前顯示級別下的文件。如圖3中,設L(i,j)為觀察點塊文件,而周圍三個塊文件則是經過一定計算會顯示的文件塊。
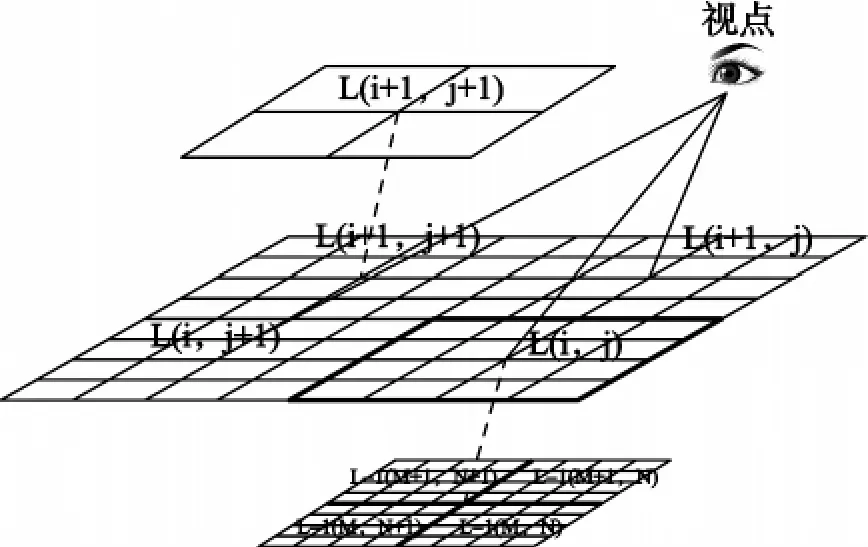
圖3 地形構建實時分級
首先計算出視點到L(i,j)的空間距離Lij,然后轉換成柵格個數RLij,通過公式(3)計算得到當前塊的級別(其中blockSize為分塊文件的柵格數)。把L(i,j)分為相同的4塊,以相同的計算方法計算L(i,j)4塊到視點的距離,并計算層級,如果有一個層級比L(i,j)中心點的級別更高,就需要讀取更高級別的文件數據,如圖3中L(i,j)繼續分級后的文件塊為圖4所示。圖5為某一次繪制時,讀入的不同級別的文件塊。

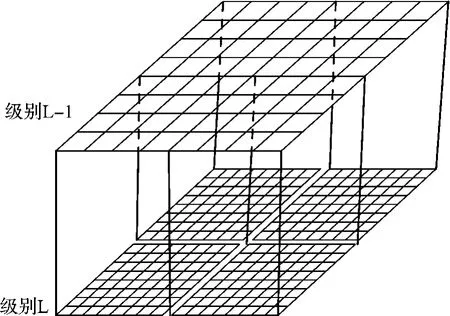
圖4 各級數據文件示意圖
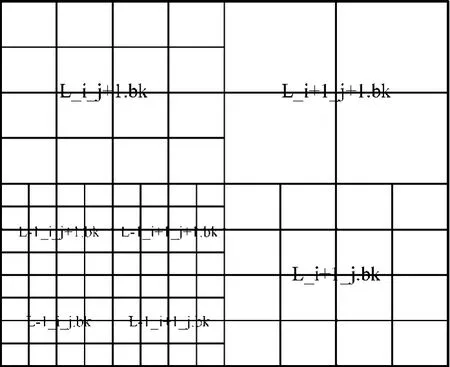
圖5 視圖中的地形數據
為了保存每個文件塊(block)文件的數據,我們設計了如下結構體:
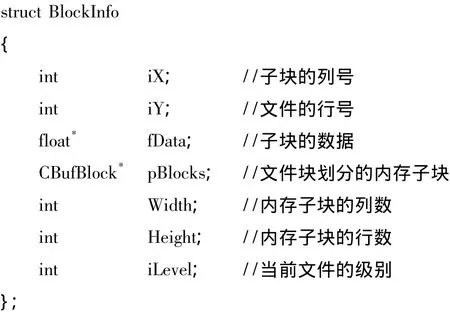
該數據結構中,iX、iY分別表示當前塊在當前級別(iLevel)下的列、行號;fData表示保存在內存中的文件塊中的高層數據;pBlocks表示文件塊劃分的內存子塊,這些子塊將通過自繪完成地形的可視化;Width、Height表示內存中pBlocks所包含的內存子塊的列、行數。
當需要獲得某點高程數據時,只需要知道當前點P在總的DEM柵格中的行列號(x,y),將行列號減去當前文件塊的起始行列號(ox,oy),可得到P在當前文件夾中的行列號(m,n)∶(m,n)=(x-ox,y-oy),再由n*Width為索引得到柵格點的值。
(2)塊級別評價函數
(3)式定義了數據分塊級別判定函數,RLij表示視點到當前文件塊或內存子塊中心點的柵格個數,中心點的高程值取整個DEM的平均值,且level均為整數。我們定義最精細的層級為1,視點距離目標點的柵格數小于文件分塊的柵格數的兩倍。(3)式中log2(RLij)求取RLij的對數,-6表示-7+1,即為-log2(BlockSize)+1,文中的BlockSize為文件子塊所劃分的柵格數,即256。因此,判別公式實際上是(4)式。

(5)式表示一般的視距柵格數求取方法,由公式可以看出相對于當前文件來說的柵格視距RL只與層級level與采樣間隔數XYDiff相關,在裁剪數據生成后BlcokSize為常數。由于當前視圖讀取的文件層級為level,并且當前文件中采樣間隔數XYDiff由level確定(2)式,因此可確定RL只與BlockSize相關,且為一常數(6)式。
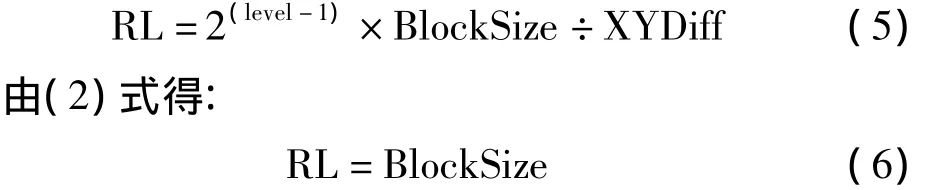
由于RL為一個常數BlockSize,就可以通過目標點坐標與RL計算出當前級別下視域范圍(當前文件級別下的柵格矩形),就可以在計算出目標點所在的文件塊后(圖6中文件塊5),根據RL就可以判定,只需要再讀入文件塊5周圍的8個文件塊,就可以覆蓋整個視域,達到只讀取和構建視域范圍內地形的目的。
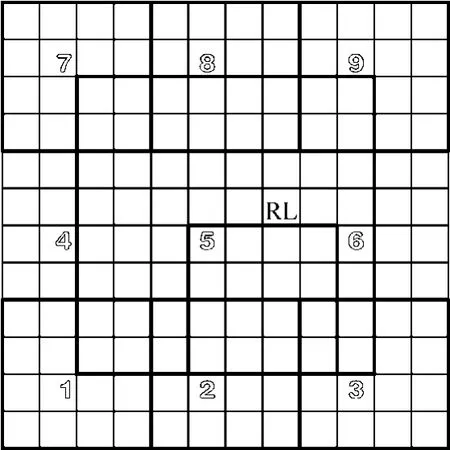
圖6 視域中的文件塊
(3)四叉樹分塊過程
3 算法性能分析與討論
3.1 數據分塊分析
測試中所用GRID數據為列12020,行12618,柵格大小 22.5 ×22.5,計算面積為 76782.10725 km2,文件大小578.57 MB,文件裁剪耗時5 min。文件裁剪后分為7個級別的數據,即包含7個文件夾,共3166個文件,總的數據大小為771 Mb,占用空間774 Mb。數據大小增加了33.25%。第一級別的數據大小為578 Mb,占用空間580 Mb,每降低一個級別,數據大小為上一級的四分之一。
3.2 三維地形顯示性能分析
在內存消耗方面,相對于把所有的地形數據讀入內存中,本文中提出的算法只讀入少量數據,僅僅是讀取有限的數十個文件塊。可以對算法中數據讀入大小做一定假設,每次讀入的數據最多不超過40個小文件塊,即不超過10 Mb。總的來說,讀入內存的數據趨于常數,不會因為地形數據變大而變大。
在實時構建的地形中,同一時間所顯示的頂點數在256×256=65536到256×256×40=2621400之間。在具體實際中也可以將分開的柵格數降為128,可以減少場景中繪制的頂點數。在實時顯示時,場景動畫的幀頻為十幀以上。場景中繪制頂點數,與讀入的地形數據相關,會在一定范圍內變動。
3.3 地形縫隙修補
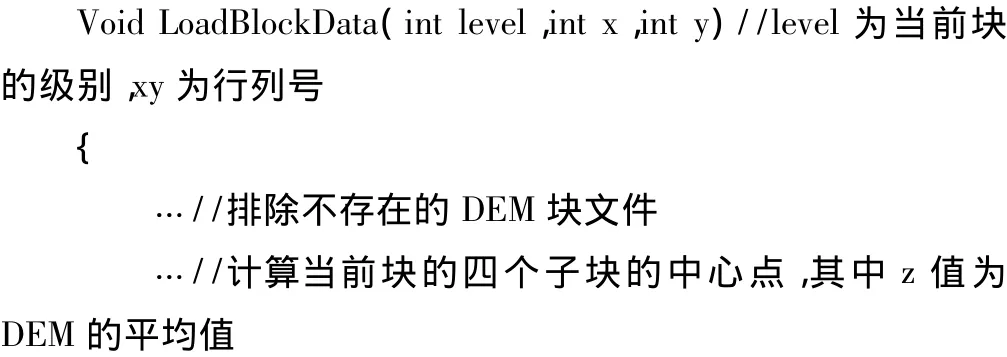
由于在地形構建中有不同級別的數據顯示,在不同級別數據的臨邊上,細節較豐富的塊上必定多出部分點,如圖7中的兩個圓圈。圓圈處不能保證左右兩邊的面在同一個面上,因此就需要對這些點和面做單獨處理。
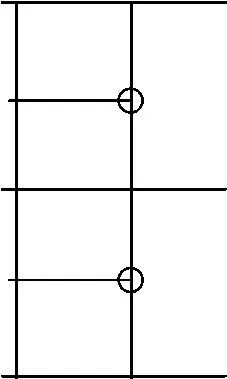
圖7 地形縫隙示意圖
對于這種處于邊緣,并且相鄰子塊處于不同級別的子塊來說,需要用三角形繪制出采樣間隔造成的不重合的點,如圖8。但是這種情況只有在相鄰級別不超過1的情況下才能滿足條件,因此,需要在前期判斷和處理,使相鄰級別不超過1。
圖8 地形補縫原理示意圖
在每個64×64的子塊自繪時,進行對當前塊與其下部塊與左邊塊進行補縫,那就需要知道每個子塊的級別以及子塊所在的文件塊,以便讀取高程數據。我們把要顯示的文件塊用鏈表存儲,并為存儲在文件子塊結構體中的子塊提供相關的信息,比如,子塊所在文件在鏈表中的索引,再通過索引獲取結構體中的信息,這樣就可以獲得所需要的信息。
4 結論
本文提出的基于多級別柵格數據的多層次LOD劃分方法,對原有DEM數據文件做層級劃分與重采樣,生成具有層次和不同分辨率的小文件塊。在三維地形實時構建時,計算出視圖中要顯示的文件與級別,實現了部分地形數據的讀取,使內存占用大大減少。在顯示時,對內存中數據進一步做LOD分級,讓顯示的面片更少。
與已有的三維地形構建方法相比,本文中算法實時,由于只對每個塊進行層級判別,因此可視化過程中的計算量少,可視化過程中幾乎不受計算過程的影響,級別判斷時間大概為0.0083 s左右;而且相對于其他算法把全部數據讀入內存,本文算法在顯示中只需讀取可視范圍內的DEM數據與影像數據,在可視化過程中占用很少的內存,大概在3Mb~10 Mb之間。在這種算法基礎上,基于格網表達的DEM模型數據管理簡單易于實現交互操作。
由于在內存使用及計算量方面減少,本文提出的算法總的來說達到了預期目標,提出了一種新的三維地形構建方案,并優化了現有的三維地形在某些方面的不足。
[1]呂希奎,周小平.實戰OpenGL三維可視化系統開發與源碼精解[M].北京:電子工業出版社,2009:125-239.
[2]孫敏,薛勇,馬藹乃.基于格網劃分的大數據集DEM三維可視化[J].計算機輔助設計與圖形學學報.2002,14(6):566-580.
[3]羅景馨,唐琎.基于改進四叉樹分割和結點存儲的LOD算法[J].計算機工程.2009,35(20):202 -204.
[4]徐文學,江濤,姚兵.基于OpenGL的DEM三維仿真方法研究[J].國土資源信息化.2008(1):7-11.
[5]黃超超,凌永順,呂相銀.ROAM動態地形渲染算法研究[J].計算機仿真,2005,22(1):216 -219.
[6]周宏偉,楊平,陳琦.實時地形可視化ROAM算法的分塊改進[J].測繪通報,2003,(8):61 -63.
[7]江流長.ROAM地形渲染算法的實現[J].農業網絡信息,2006,(5):42 -44.
[8]涂超.ROAM算法原理及其應用研究[J].遼寧工程技術大學學報,2003,22(2):176 -179.
[9]解志剛,馬秋禾,趙金萍.基于二叉樹結構的地形分塊實時漫游的研究[J].海洋測繪,2004,24(5):35-38.
[10]劉修國,張劍波.基于DEM庫的地表模型實時簡化方法[J].小型微型計算機系統,2004,25(2):280 -282.
[11]http://www.gdal.org[OL]