工業機器人輔助數控精密木雕加工中心研究
2013-08-07 06:02:20苗新剛
機電產品開發與創新 2013年3期
鄭 嬌,汪 蘇,苗新剛
(北京建筑工程學院 北京市建筑安全監測工程技術研究中心,北京 100044)
0 引言
近幾年雕刻藝術越來越受到人們的關注。傳統的手工雕刻方法對工匠技術水平的要求極高,而且還具有時間周期長、效率低等特點,遠遠不能滿足現在人們的需求。機器人輔助數控精密木雕加系統,在數控雕刻加工系統的基礎上,加入機器人設計,能夠完成較為復雜的加工工藝。它具有數據采集、處理、加工路徑生成、雕刻一體化的設計,大大的提高了雕刻精度及生產效率。
1 系統總體設計
工業機器人輔助數控精密木雕加工系統是一項基于設計、開發、數據采集處理、數據輸出與加工等多項工作為一體的研究系統。本系統可以實現平面浮雕、鏤空雕刻、空間立體雕刻等多種功能。
1.1 系統結構及工作流程
系統主要包括圖像采集、數據處理子系統、控制子系統、數據輸出與加工子系統等四個部分。
系統通過3D 掃描儀、Artcam 等一系列軟件進行圖像采集、處理。生成模型,經過處理最終生成控制系統所識別的NC 代碼。控制系統通過PC 機完成NC 代碼的讀取、加工路徑的仿真、及代碼的輸出,控制機床進行加工處理。加工過程通過機床來完成,機床根據接收到的指令,選擇不同的工作方式,最終完成浮雕、立體雕刻任務。系統工作流程如圖1所示。
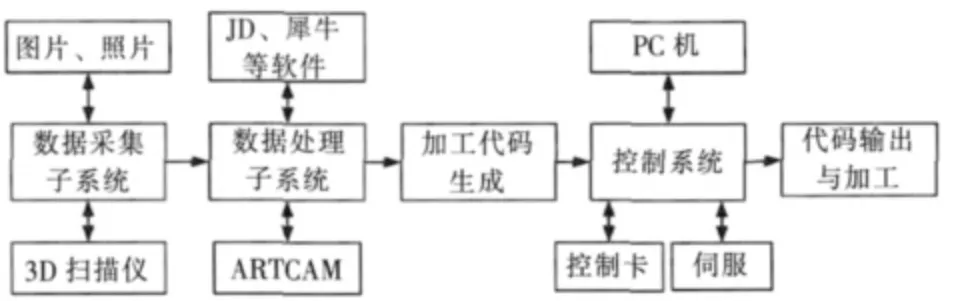
圖1 系統工作流程圖
工業機器人輔助數控精密木雕加工中心是綜合多種雕刻功能為一體的雕刻系統。所以在圖像采集處理上需要采用不同的軟件進行處理。系統采用3D 掃描儀、Artcam、JD、犀牛等多種軟件進行模型掃描、建模、路徑仿真及加工代碼生成。控制系統包括PC 機、控制卡及伺服,主要對路徑進行仿真和控制機床進行加工處理。
1.2 數控雕刻加工中心
雕刻機采用四軸空間結構,分別為X、Y、Z 軸,另外在立體雕刻空間還有一旋轉臺,轉軸為A 軸。旋轉軸A 軸的主要作用是完成立體加工,在進行立體雕刻時,旋轉軸根據程序的設定,進行360°旋轉或是進行翻轉完成立體雕刻。旋轉臺的設計,是雕刻機完成立體雕刻的關鍵。雕刻機外形需采用真空吸附式平臺,Y 軸龍門式移動,工業輔助機器人安裝在龍門架上,雕刻機頭安裝在機器人末端軸上,通過龍門架和機器人的協調動作來完成各種復雜的雕刻任務。如圖2所示。
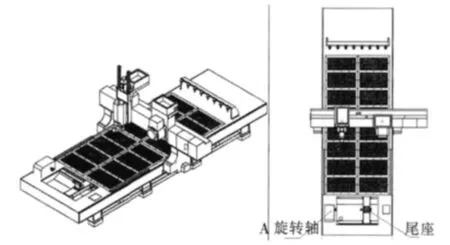
圖2 數控木雕機結構圖
1.3 機器人介紹
系統采用MOTOMAN-MH50 型機器人,該機器人為垂直多關節形結構,機器人按關節分為S 軸、L 軸、Y軸、R 軸、B 軸、和T 軸,這種結構具有動作靈活、工作空間大、干涉小等特點,適合完成復雜結構雕刻的任務。機器人通過按動示教編程器上的軸操作鍵,可以實現機器人在關節坐標系中每個軸所需的動作。如圖3所示。
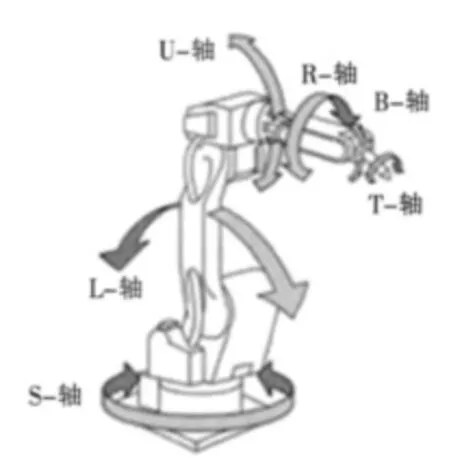
圖3 關節動作示意圖
1.4 機器人輔助作用及工作流程
對于一些復雜結構的立體雕刻,僅依靠旋轉軸的輔助作用,是無法達到目的的。在這種情況下,就需要增加機器人的設計,利用機器人可以進行多角度加工的特點,去雕刻這種復雜結構。
機器人與雕刻機之間通過I/O 來交互信息。當雕刻機完成工作時,向機器人發送指令,機器人接收到指令,同時向雕刻機發出 “信息已接收” 指令,這時雕刻機離開工作位置,機器人移動到工作位置,機器人開始進行雕刻;當機器人完成雕刻任務之后,同樣向雕刻機發出指令,雕刻機接收到指令之后向機器人發出 “信息已接收” 指令,這時機器人離開工作位置,由雕刻機繼續工作。機器人與雕刻機之間的信息傳遞如圖4所示。
機器人工作方式:機器人采用離線編程方式,這種工作方式比傳統的示教編程方法更快、個有效。系統采用Powermill 機器人模塊,完成機器人語言的編程。工作流程如圖5所示。
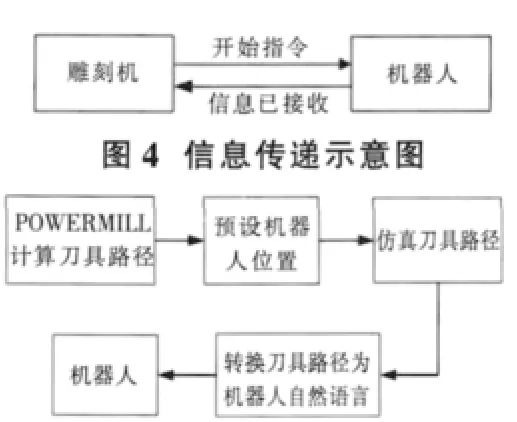
圖5 機器人工作流程圖
2 成品展示
該系統經過多次試驗與調試,現在已經可以進行正常工作,并可以加工各種成品。其中包括浮雕、立體雕刻成品。圖6 為該中心的加工成品。

圖6 浮雕、圓雕成品圖
3 結論
論文介紹了工業機器人輔助數控精密木雕加工系統的工作過程,以及各個子系統之間的復雜關系;系統加入機器人設計,為完成復雜結構工藝雕刻提供平臺。系統相比于普通數控雕刻加工系統的優勢在于對于復雜結構工藝的加工。
[1]惲志東.基于Mastercam X Art 的浮雕設計與數控加工[J].工具技術,2009,42.
[2]Angeles J.,宋偉剛(譯).機器人機械系統原理[M].北京:機械工業出版社,2004.
[3]金振林.新型六自由度正交并聯機器人設計理論與應用技術研究[D].燕山大學,2002.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
電信科學(2016年10期)2016-11-23 05:11:56