反艦導彈CGF系統智能決策模型的研究*
2013-08-10 09:04:00方良汪浩
艦船電子工程 2013年8期
方 良 汪 浩
(中國人民解放軍92941部隊 葫蘆島 125000)
1 引言
CGF智能決策模型的設計是CGF建模中關鍵的部分,它的本質就是智能化技術在CGF建模中的具體應用[1~2]。用于解決CGF智能化的主要手段是在設計過程中采用人工智能技術。智能技術已得到各國的重視,在空戰、坦克等領域已較成功地開發了一些CGF系統[3~4],國內的某坦克CGF系統利用Agent技術實現坦克分隊的機動仿真[5]。
反艦導彈突防能力是現代反艦導彈作戰最為重要的能力之一,反艦導彈突防能力的生成需要依賴于大量的試驗工作,這些試驗工作中最重要的就是飛行試驗,但是這些試驗的組織需要大量的兵力,耗費大量的經費。構建反艦導彈CGF系統智能決策模型,利用這些模型進行仿真試驗研究,能夠得到大量的統計數據,利用這些數據提升反艦導彈的突防能力。
2 反艦導彈CGF系統智能決策模型建模
反艦導彈CGF系統智能決策模型的組成如圖1所示。CGF系統主要分為實體模型和推理決策模型兩部分[6~7]。實體模型包括反艦導彈綜控機模型、反艦導彈物理模型和反艦導彈傳感器模型。推理決策模型的作用是根據目標信息與環境信息生成相應的戰場態勢,根據戰場態勢、戰術知識庫、和作戰規則作出戰術決策、動作規劃并執行戰術動作,各實體模型發出相應的命令和控制信號,如反艦導彈抗干擾對抗、反艦導彈機動等。
反艦導彈智能決策模型加載于反艦導彈平臺系統上,通過反艦導彈的傳感器模型實時獲取突防目標信息,經過傳輸和融合等相關數據處理后,實現目標捕捉和跟蹤,并把處理后的數據作為本系統必要的決策數據信息,專家系統依靠這些信息,通過搜索規則集中的規則,來完成定性的知識推理和定量的模型計算,形成一個有機的決策整體,從而為反艦導彈形成智能決策方案,進行有效的突防決策行為。
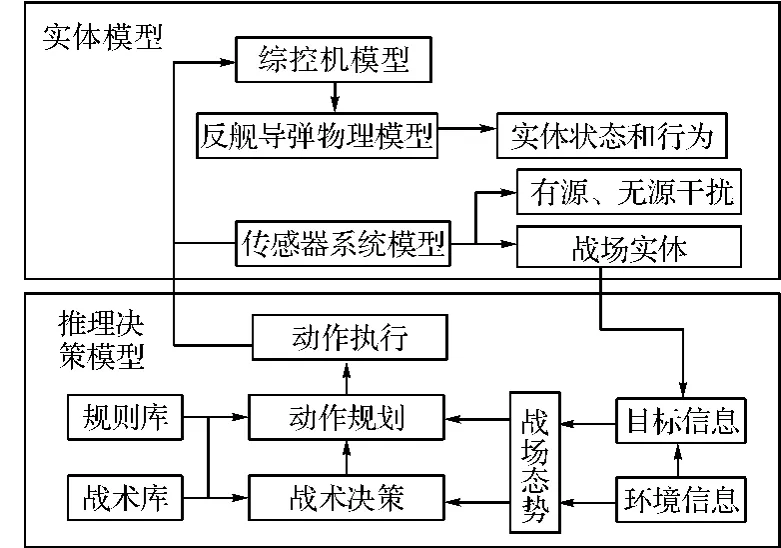
圖1 反艦導彈突防CGF系統智能決策模型組成
2.1 反艦導彈CGF系統的實體模型
在反艦導彈CGF系統中,實體模型包括反艦導彈物理模型,制導控制模型和傳感器模型。
反艦導彈的物理模型主要是反艦導彈的彈道物理模型。彈道物理模型采用飛行動力學建立的導彈運動方程組來描述作用在導彈上的力、力矩和導彈運動,由描述導彈質心運動和彈體姿態變化的動力學方程、運動學方程、角度幾何關系方程組成。
導彈的傳感器模型包括導引頭模型、捷聯慣導模型、高度表模型等,實時敏感導彈自身的位置、姿態及被攻擊目標的運動,將敏感到的信號傳輸到彈上控制器模型。導彈的捷聯慣導模型完成導彈飛行過程中相對慣性空間的線運動和角運動參數的實時測量,并實時進行導航方程解算,輸出飛行過程中三個方向的加速度、速度、角速率、姿態角等信息。
綜控機模型根據傳感器輸入的導彈、目標信息以及導彈的控制規律,控制導彈改變當前姿態和質心位置,飛向目標。
對于導引頭模型在一定的虛警概率下,依據雷達探測方程,實施對導引頭的功能仿真。
無干擾條件下,雷達導引頭對目標的探測距離由雷達對目標的最大作用距離及雷達的通視距離所決定,雷達的探測距離計算式(1)如下[8]:

其中Rmax是雷達對目標的最大作用距離,Rs為通視距離。

式中,Pt為雷達發射功率(W);Gt為雷達天線增益(倍);λ為雷達工作波長(m);σ為目標雷達截面積(m2);K為波爾茲曼常量,取為1.38*10-23W·s/°;T0為絕對溫度,取為290K;Δfr為雷達接收機帶寬(Hz);Fn為噪聲系數;(SN)min為雷達的最小檢測信噪比,定義為雷達發現概率為0.5時接收端的信噪比。

式中,ht為目標高度,hr為雷達高度。
在噪聲干擾條件下,單部警戒雷達對目標的最大探測距離為

式中,Pt為雷達發射功率(W);Gt為雷達天線增益(倍);λ為雷達工作波長(m);σ為目標雷達截面積(m2);Nr為雷達的內部噪聲;Nj為雷達接收的干擾機噪聲;(SN)min為雷達的最小檢測信噪比,定義為雷達發現概率為0.5時接收端的信噪比。

式中,K 為波爾茲曼常量,取為1.38*10-23W·s/°;T0為絕對溫度,取為290K;Δfr為雷達接收機帶寬(赫茲);Fn為噪聲系數;

式中,Pj(i)為第i部干擾機的發射功率(W);Gj(i)為第i部干擾機的天線增益(倍);γj(i)為第i部干擾機干擾信號對雷達天線的極化損失;Rj(i)為第i部干擾機到雷達的距離(m);Δfj(i)為第i部干擾機的帶寬(Hz);G′t(θji)為雷達天線主瓣指向目標方向時,在第i部干擾機方向上的增益(倍)。
2.2 反艦導彈CGF智能決策模型
反艦導彈CGF智能決策模型主要包括兩部分,一是反艦導彈突防防空導彈攔截的智能決策模型,二是反艦導彈突防敵方電子干擾的智能決策模型。
在反艦導彈CGF智能決策模型中,把專家系統和決策支持系統結合,形成智能決策模型,專家系統輔助決策的方式屬于定性方式,決策支持系統輔助決策的方式屬于定量分析。專家系統由“推理機、知識庫和動態數據庫”三部件組成,其中知識庫中存放大量關于反艦導彈突防的專家知識;推理機完成對導彈突防知識的搜索和推理;動態數據庫存放已知的事實和推理出的事實和結果[9]。
反艦導彈CGF智能決策模型在利用推理機進行推理時,既要進行大量知識的搜索,又要對知識的前提進行匹配,這些知識主要包括反艦導彈捕捉目標知識集、反艦導彈跟蹤目標知識集、反艦導彈對抗有源干擾知識集、反艦導彈對抗防空導彈知識集。對于每一個知識,需要得到這些知識的調用條件,通過調用知識集中的知識得到輸出結果。反艦導彈突防CGF智能決策知識集組成如圖2所示。
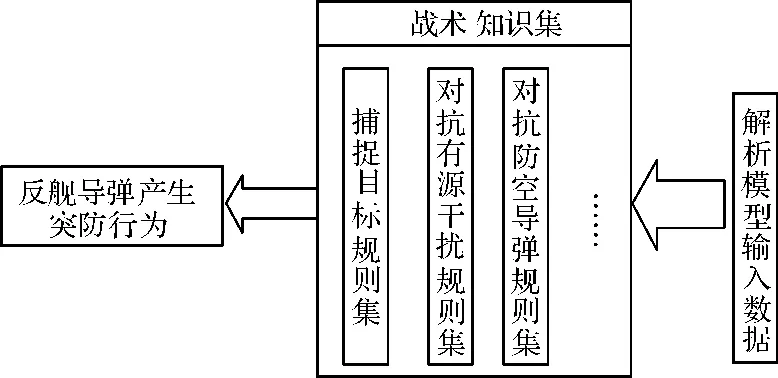
圖2 反艦導彈突防CGF智能決策規則集組成
根據基于Agent[11]建模思想,可以將單個反艦導彈實體看作一個Agent,反艦導彈CGF智能決策模型的構建主要是涉及個體Agent模型,要構建反艦導彈的智能決策模型,即進行行為建模。反艦導彈利用傳感器獲取實體狀態和戰場態勢,進行威脅評估,通過搜索匹配戰術知識庫中的專家知識,進而給出戰場態勢評估,從而制定戰術決策,進而完成動作規劃。圖3給出了基于Agent的智能決策模型框架。
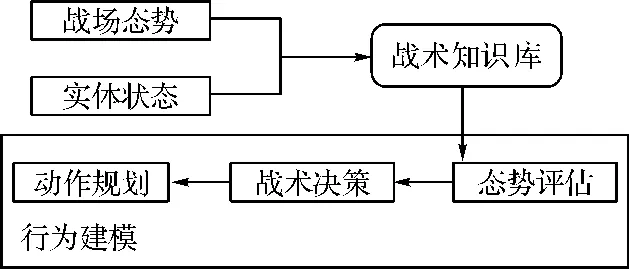
圖3 基于Agent的智能決策模型框架
反艦導彈在飛行末端,會遭遇防空導彈的攔截,反艦導彈通過搜索規則庫中相應的規則,采取相應的動作,進行相應的突防過程。
當遭遇敵方有源干擾時,反艦導彈搜索規則庫中的規則,采取相應的智能決策,進行相應的突防過程。
3 結語
本文采用基于Agent的思想構建了反艦導彈突防CGF系統智能決策模型,并應用于系統仿真中。反艦導彈CGF系統智能決策模型的研究對反艦導彈作戰、試驗、訓練效能評估有著重要的意義。
進一步的工作是對CGF技術與基于Agent建模技術做深入的研究,提高系統的自治性,增強模擬系統的真實性。
[1]張立友,唐曉明,郭齊勝.艦艇CGF系統智能推理決策研究[J].計算機仿真,2006,23(6):3740.
[2]王為頌,沈立軍,張景悅.艦艇編隊對空防御智能決策支持系統研究[J].艦船科學技術,2005,27(1):6163.
[3]郝成民,劉湘偉.電子戰CGF系統的設計與建模[J].計算機仿真,2006,23(1):3335.
[4]韓志軍,錢保成,王潤崗.分隊戰術訓練仿真系統CGF技術[J].火力與指揮控制,2005,30(8):6163.
[5]裴宏,宋麗,吳迪.基于Agent的坦克連CGF系統智能機動模型研究[J].裝甲兵工程學院學報,2007,21(2):2023.
[6]王達,張琦,郭剛,等.作戰仿真中的人類行為表示[J].計算機仿真,2004,21(6):1315.
[7]郭齊勝,楊立功,楊瑞平.計算機生成兵力導論[M].北京:國防工業出版社,2006.
[8]許大琴,李照順.警戒雷達被干擾時探測范圍的實時計算方法[J].火力與指揮控制,2009:128130.
[9]曲行達,龔光紅,王行仁.CGF系統中多級智能決策實現方法[J].北京航空航天大學學報,2004(7):644647.
[10]濮永仙.貝葉斯決策網在智能決策系統中的應用研究[J].計算機與數字工程,2011,39(8).
[11]張玉冊,楊青松,陳珂.全分布式人工智能技術在艦艇指控系統中的應用研究[J].情報指揮控制系統與仿真技術,2004,26(1):5255.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32