基于BP網絡與DS證據理論的態勢估計問題研究*
2013-08-10 09:04:04周國祥許錦洲韋曉萍
艦船電子工程 2013年8期
周國祥 許錦洲 韋曉萍
(1.海軍蚌埠士官學校 蚌埠 233012)(2.海軍指揮學院浦口分院 南京 211800)
1 引言
隨著傳感器和軍事信息系統的發展應用,海戰場各作戰平臺的探測距離遠、機動能力強、火力范圍廣,使得戰場態勢變化更加快速復雜,且敵我雙方交戰過程中普遍采用了偽裝、隱蔽和欺騙(CC&D)等戰術,如何及時、準確、迅速地反映戰場態勢的變化,增強對戰場態勢的感知,逐步識別敵方意圖和作戰計劃,并作出正確的態勢估計[1],將成為作戰雙方爭奪戰場信息優勢的焦點[2]。
態勢估計是信息融合功能模型[3~6]的二級處理過程,它接收一級融合結果,并從中抽取對當前態勢盡可能準確、完備的戰場情報信息,為各級指揮員作戰決策提供輔助支持。態勢估計是在決策級上進行的一種推理行為[7],由于傳感器性能以及敵方干擾、欺騙等行為,使得態勢估計過程需要處理的信息具有高度不確定性。同時,由于作戰的復雜性,使得用于推理的軍事知識存在著不確定性。因此,態勢估計系統必須能夠處理不確定性信息,進行有效推理[8]。
用于態勢評估的主要方法有模板匹配[9]、規劃識別[10]、貝葉斯網絡[11~12]以及專家系統[13]等,這些方法運用于戰場態勢評估問題各有其優缺點。DS證據理論是一種有效的不確定性推理方法,比傳統概率論能更好地把握問題的未知性和不確定性[14]。該理論提供了證據的合成方法,能融合多個證據源提供的證據,因此成功應用于信息融合領域。針對文獻[7~8]中存在的基本概率賦值函數由領域專家給出,結果容易受專家主觀因素影響的問題,本文提出一種基于神經網絡和DS證據理論相結合的態勢估計方法,使用神經網絡中應用最為廣泛的BP網絡來求解基本概率賦值函數,再使用DS證據理論進行態勢估計。結果表明,該方法可有效克服專家主觀因素的影響,為海戰場戰術態勢估計提供新的途徑。
2 神經網絡和DS證據理論
2.1 BP網絡原理與算法步驟
BP神經網絡是一種多層前饋神經網絡,其主要特點是信號前向傳播,誤差反向傳播。該網絡是一個典型的多層網絡,由輸入層、一個或多個隱含層、輸出層組成,各層之間采用全互連方式,同層單元之間不存在連接。可以利用訓練樣本的學習建立起記憶,將未知模式判為最接近的記憶。且經過神經網絡處理的數據,可近似認為數據間是相互獨立的,能較好滿足DS證據理論對證據獨立性的要求。
BP算法的基本思想[15]是,學習過程由信號的正向傳播與誤差的反向傳播組成。正向傳播時,輸入樣本從輸入層傳入,經各隱層逐層處理之后,傳向輸出層。若輸出層的實際輸出與期望輸出(導師信號)不符,則轉入誤差的反向傳播。誤差反傳是將輸出誤差以某種形式通過隱層向輸入層逐層反傳,并將誤差分攤給各層的所有單元,從而獲得各層單元的誤差信號,此誤差信號即作為修正各單元權值的依據。這種信號正向傳播與誤差反向傳播的各層權值調整過程是周而復始地進行的。權值不斷調整的過程,也就是網絡的學習訓練過程,此過程一直進行到網絡輸出的誤差減少到可接受的程度,或進行到預先設定的學習次數為止。
BP算法的步驟[15]如圖1所示。

圖1 標準BP算法流程
針對標準BP算法存在易陷入局部極小、學習效率低、收斂速度慢、隱節點選取缺乏指導等缺陷,目前已提出不少有效的改進算法,較常用的有增加動量項、自適應調節學習率、引入陡度因子等方法。本文采用增加動量項和自適應調節學習率相結合的BP改進算法。
1)增加動量項
若用W 代表某層權矩陣,X代表某層輸入向量,則含動量項的權值調整向量表達式為

可見,增加動量項即從前一次權值調整量中取出一部分疊加到本次權值調整量中,α稱為動量系數,一般α∈(0,1)。動量項反映了以前積累的調整經驗,對于t時刻的調整起阻尼作用。
2)自適應調節學習率
設一初始學習率,若經過一批次權值調整后使總誤差E總增加,則本次調整無效,且有

若經過一批次權值調整后使總誤差E總減少,則本次調整有效,且有

2.2 基于DS證據理論的態勢估計
1)DS證據理論
在命題A的一個辨識框架Θ中,有冪集2Θ上的基本概率賦值函數m:2Θ→ [0,1],且滿足:
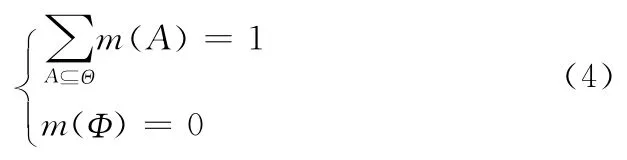
式(4)中,m(A)稱為辨識框架上的基本概率賦值函數,它表示證據支持命題A發生的程度。其信任函數bel(A)和似然函數pl(A)分別如下式(5)~(6)所示:

信任函數bel(A)表示證據完全支持命題A的程度,似然函數pl(A)表示證據不反對(不懷疑)命題A的程度,區間 [bel(A),pl(A)]構成證據的不確定空間,表示命題的不確定程度。
設m1,m2,…,mn是同一辨識框架Θ上n個不同證據的基本可信度分配,由Dempster公式進行合成,合成后的mass函數m:2Θ→ [0,1]如下:
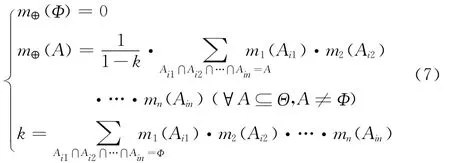
式中,m1(Ai1),m2(Ai2),…,mn(Ain)為焦元。k為證據之間的沖突概率,反映了證據之間沖突的程度;歸一化因子(1-k)-1的作用就是避免在合成時將非0的概率賦給空集Φ。
2)BP網絡與DS理論的融合方法
本文所采用的BP網絡與DS理論的融合模型如圖2所示。在傳感器探測和0級處理、1級處理的基礎上,將各時刻傳感器所探測目標的狀態估計、特征信息、航跡信息、屬性估計、事件(輻射源事件、機動事件)等信息提取出來,進行模糊化處理后利用BP神經網絡進行敵目標意圖分類識別,將神經網絡的輸出作為DS證據理論推理所需的基本概率賦值,采用DS證據理論來完成決策級融合,實現對海戰場戰術態勢的評估。該模型將BP網絡自主學習、聯想記憶、容錯能力與DS證據理論的不確定推理能力結合起來,能較好地解決DS理論中基本概率賦值難以獲取的問題。
3)融合判決準則
本文采用如下基于規則的判決準則:
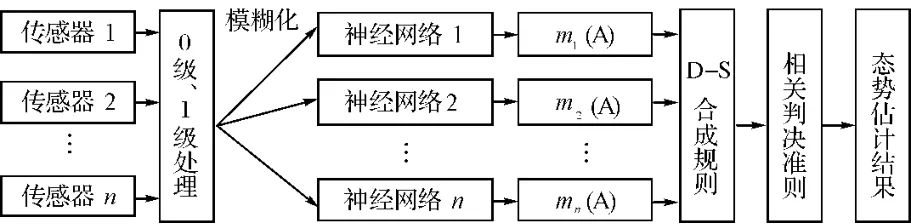
圖2 BP網絡與DS理論的融合模型
(1)判定的目標作戰意圖應具有最大的基本概率分配函數值;
(2)判定的目標作戰意圖與其它作戰意圖的基本概率分配函數值之差要大于某個閾值;
(3)表示未知的m(Θ)必須小于某一門限;
(4)判定目標作戰意圖的基本概率函數值要大于不確定基本概率函數值m(Θ)。
3 算例仿真
3.1 目標信息預處理
由于各種傳感器得到的速度、目標方位、發現距離等數據均為實數,為減少識別空間,便于神經網絡的分類判決,需要對各屬性進行模糊化,本文采用文獻[16]的方法進行模糊化處理。
模糊化后各識別屬性如下:
1)目標類型:分為 (C1,C2,C3)三種類型。其中,C1為巡洋艦等大型艦艇;C2為巡邏艇、快艇等;C3為驅護艦。
2)運動速度:分為快、較快、較慢、慢,分別表示為(V1,V2,V3,V4)。
3)目標方位:將識別參考點設為中心,以正北、正東為正方向的四個象限,分別表示為 (B1,B2,B3,B4)。
4)發現距離:分為遠、較遠、較近、近四個類別,表示為(D1,D2,D3,D4)。
5)目標火力范圍:分為遠、較遠、較近、近四個類別,表示為 (F1,F2,F3,F4)。
6)航跡類型:分為直航、以直航為主、以機動為主、機動四種,表示為 (T1,T2,T3,T4)。
7)警戒雷達是否開機:R1為開機,R2為未開機。
8)導攻雷達是否開機:R1為開機,R2為未開機。
對海戰場戰術態勢的類別分為進攻、防御、相持、逃跑四種,表示為 (A1,A2,A3,A4)。
3.2 應用實例
根據以往數據資料積累可得到一些敵目標屬性及其意圖信息,首先對屬性信息進行預處理,建立起BP網絡的訓練樣本集,如表1所示。

表1 屬性模糊化后BP網絡學習樣本
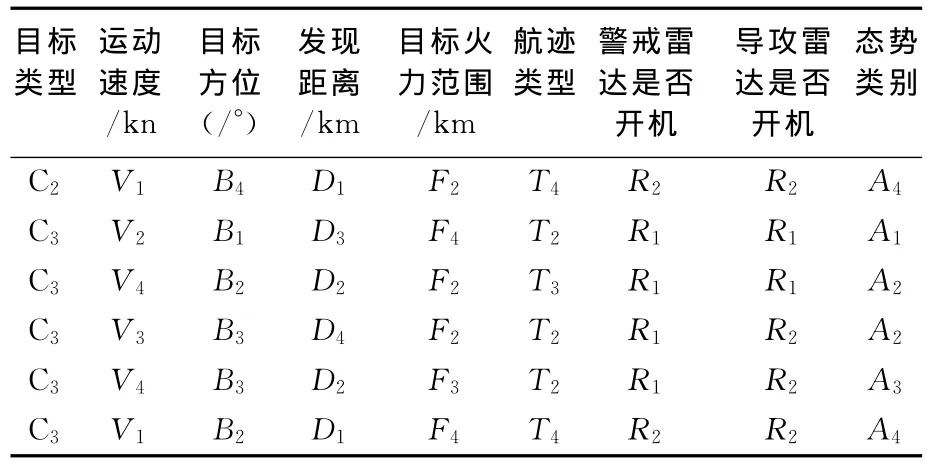
續表1
選取上述訓練樣本集對神經網絡進行訓練,這里采用3層BP神經網絡,訓練算法采用增加動量項和自適應調節學習率的改進BP算法,訓練誤差設為0.01,經反復訓練確定網絡結構為8-11-4,BP神經網絡訓練誤差下降曲線如圖3所示。
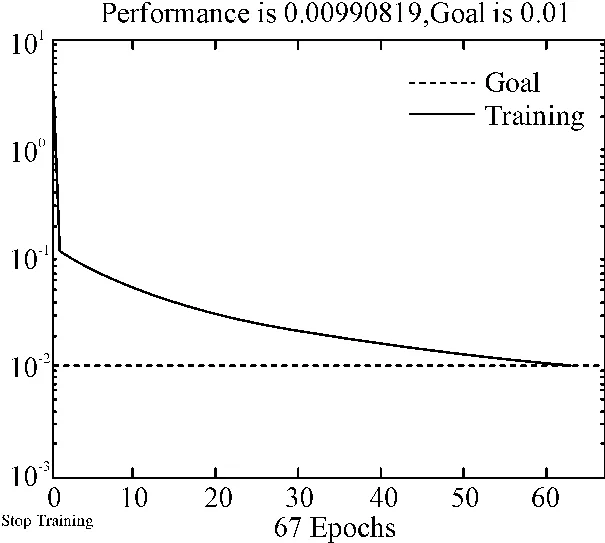
圖3 BP神經網絡訓練誤差下降曲線
設我水面艦艇執行警戒任務時發現有敵艦艇接近,敵艦意圖有進攻 (A1)、防御 (A2)、相持 (A3)、逃避 (A4)四種,則得到辨識框架Θ= (A1,A2,A3,A4)。在E1~E3時刻,分別將所探測目標的狀態估計、特征信息、航跡信息、屬性估計、輻射源事件等信息模糊化后輸入已訓練好的神經網絡,得各時刻基本概率賦值函數m1、m2、m3。經過D-S證據理論方法進行信息融合后,結果如表2所示:
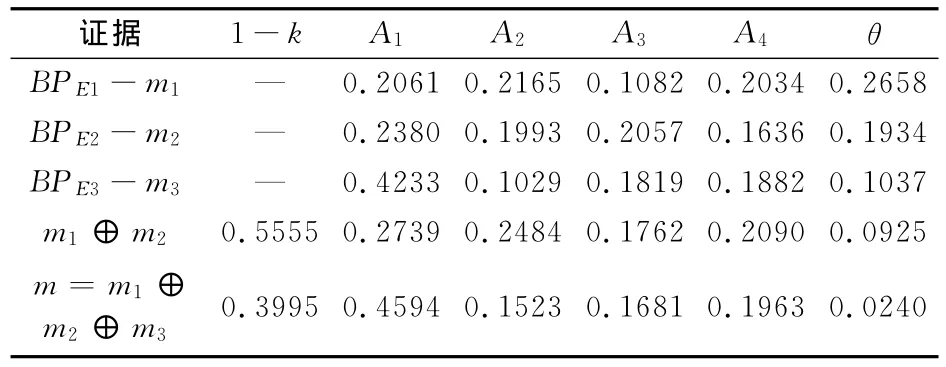
表2 證據空間的時空域融合
由表2可知,隨著時刻E3傳感器檢測到證據m3,使得A1的可信度達到0.4594,且不確定的可信度降為0.0240,若設定閾值ε1=0.40,閾值ε2=0.25,顯然有m(A1)=max{m(Ai)}>ε1,(i=1,2,3,4),且 m(A1)-max{m(Ai)}>ε2,(i=2,3,4),根據判決準則可判定敵艦艇處于態勢A1,即目標可能發動進攻,這與實際情況是相符的。
4 結語
本文分析了海戰場態勢估計的特點,提出BP網絡與DS證據理論相結合的方法,克服了DS證據理論中基本概率賦值難以獲取的問題。將傳感器0級、1級處理結果進行預處理后,輸入BP網絡進行目標意圖的分類識別,將神經網絡的輸出作為證據,采用DS證據理論完成各時刻證據空間的時空域融合,仿真試驗結果表明,該方法能有效克服專家主觀因素的影響,可有效應用于海戰場中艦艇編隊戰術態勢估計。
[1]韓崇昭,朱洪艷,段戰勝.多源信息融合[M].北京:清華大學出版社,2006:475476.
[2]趙宗貴,李君靈,王珂.戰場態勢估計概念、結構與效能[J].中國電子科學研究院學報,2010,5(3):226230.
[3]沃茲,李納斯.多傳感數據融合[M].馬薩諸塞州波士頓出版社,1990.
[4]霍爾,李納斯.多傳感器數據融合概述[J].IEEE論文集,1997,85(1).
[5]霍爾,李納斯.多傳感器數據融合手冊[M].紐約:CRC出版社,2001.
[6]斯坦伯格,波曼,懷特.回顧JDL數據融合模型[J].第三屆NATO/IRIS會議論文集,1998.
[7]徐曉輝,劉作良.基于DS證據理論的態勢評估方法[J].電光與控制,2005,12(5):3637,65.
[8]賈則,宋敬利,金輝,等.DS證據理論在戰術態勢估計技術中的應用[J].計算機測量控制,2009,17(8):15711573.
[9]李曼,馮新喜,張薇.基于模板的態勢估計推理模型與算法[J].火力與指揮控制,2010,35(6):6466.
[10]谷文祥,李麗,李丹丹.規劃識別的研究及其應用[J].智能系統學報,2007,2(1):911.
[11]杜菲菲,馮新喜.用于態勢評估的貝葉斯網絡研究綜述[J].電光與控制,2010,17(9):4247.
[12]孫兆林.基于貝葉斯網絡的態勢估計方法研究[D].長沙:國防科學技術大學,2005,10:710.
[13]Ruoff等.C3I態勢估計專家系統:模型、方法與工具[M].指揮與控制科學.AFCEA出版社,1998.
[14]韓峰,楊萬海,袁曉光.一種有效處理沖突證據的組合方法[J].電光與控制,2010,17(4):58,13.
[15]韓力群.人工神經網絡理論、設計及應用[M].第二版.北京:化學工業出版社,2007,7:4752.
[16]楊金寶,吳曉平.D-S證據理論在電路故障診斷中的應用研究[J].計算機與數字工程,2012,40(12).
[17]牛曉博,趙虎,陳新來.基于信息熵和概率神經網絡的海戰場目標識別[J].電光與控制,2010,17(4):8485.
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
當代陜西(2022年5期)2022-04-19 12:10:18
今日農業(2021年19期)2022-01-12 06:16:36
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
中老年保健(2021年11期)2021-08-22 03:15:44
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34