基于船舶操控模型的UKF濾波算法研究*
2013-08-10 09:04:06董大瓊崔恒彬康曉磊
艦船電子工程 2013年8期
董大瓊 崔恒彬 康曉磊 高 立
(海軍蚌埠士官學校航海系 蚌埠 233012)
1 引言
船舶運動建模時基于舵角反饋信息的濾波模型結(jié)合EKF濾波算法能較好地得到艦船在直線航行或轉(zhuǎn)彎時的航向精度[1],但經(jīng)緯度的濾波效果不明顯。在濾波定位的算法中,EKF/KF濾波算法存在需要計算雅各比矩陣、濾波穩(wěn)定性不足、計算復(fù)雜等缺點,相比之下UKF濾波算法更具優(yōu)勢[2~3]。
本文以船舶操控模型為基礎(chǔ),提出了北斗二代+GPS聯(lián)合定位濾波,以羅蘭C+ASF修正為備用定位的方案,將整個濾波器最優(yōu)劃分為若干個子濾波器,提高了系統(tǒng)的健壯性;引入更高精度的UKF濾波算法,且對算法進行了改進,使船舶在機動轉(zhuǎn)彎時濾波器仍給出高精度的航向、航速和定位數(shù)據(jù),通過仿真實驗證明了方案的可行性、有效性。
2 UKF濾波算法及運動模型現(xiàn)狀
2.1 UKF算法[4]
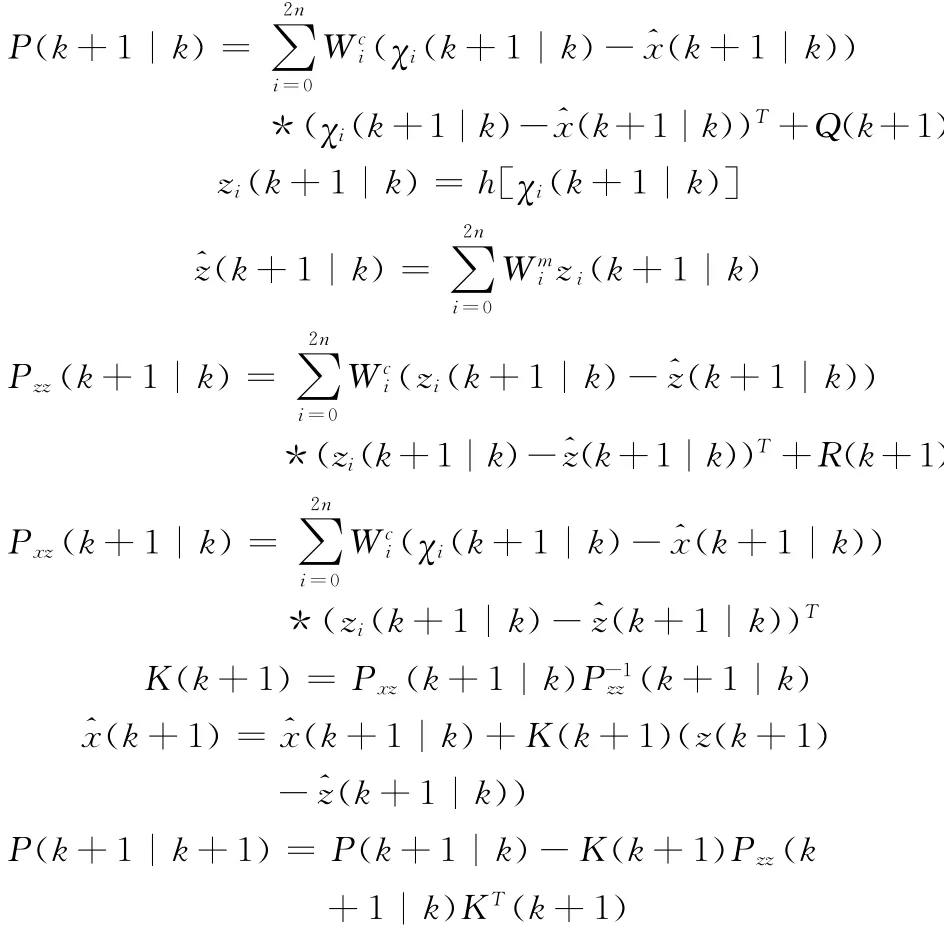
給定無跡卡爾曼濾波算法的濾波初值,計算系統(tǒng)初始sigma點以及權(quán)值,按照下述方程進行濾波運算:

2.2 舵角與航向、橫漂模型
舵角與航向關(guān)系模型即航向H與舵角β模型,舵角、航向、橫漂模型如下[5]:

H、β、υ分別為航向、舵角、橫漂,值系數(shù)TiKi為流體動力參數(shù),計算方法參看相關(guān)文獻[1]。當操舵幅度不大時(β≤15°),可以認為=0。
2.3 艦船濾波模型
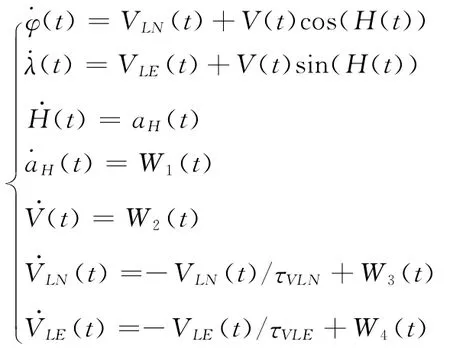
目前艦船運動建模時以緯度經(jīng)度航向航向加速度航速 北向海流速度 東向海流速度為狀態(tài)向量,以經(jīng)緯度,航向、航速為觀測量,上述狀態(tài)方程中-1/τVLN、-1/τVLE分別北向海流相關(guān)時間、東向海流相關(guān)時間,W1(t)、W2(t)、W3(t)、W4(t)為服從高斯分布的零均值白噪聲。
3 現(xiàn)狀分析及改進
3.1 UKF算法的改進[6]
UKF經(jīng)過一段時間濾波后,增益陣K達到最小值,若系統(tǒng)狀態(tài)發(fā)生突變,則濾波結(jié)果惡化,針對本文中的模型對UKF進行以下改進。
定義檢測量[7]:E(k)=|Z(k)-(k)|
根據(jù)不同量測向量定義臨界值:σ
當 E(k)>σ時P(k)=P(k)*E(k)
以上次E(k)>σ調(diào)整為基礎(chǔ),當E(k)<σ時P(k)=P(k)/E(k)。
3.2 船舶控制濾波模型[8]
濾波模型如下所示:
狀態(tài)向量:緯度 經(jīng)度 航向 航向加速度 航向二階加速度 航速 北向海流速度 東向海流速度
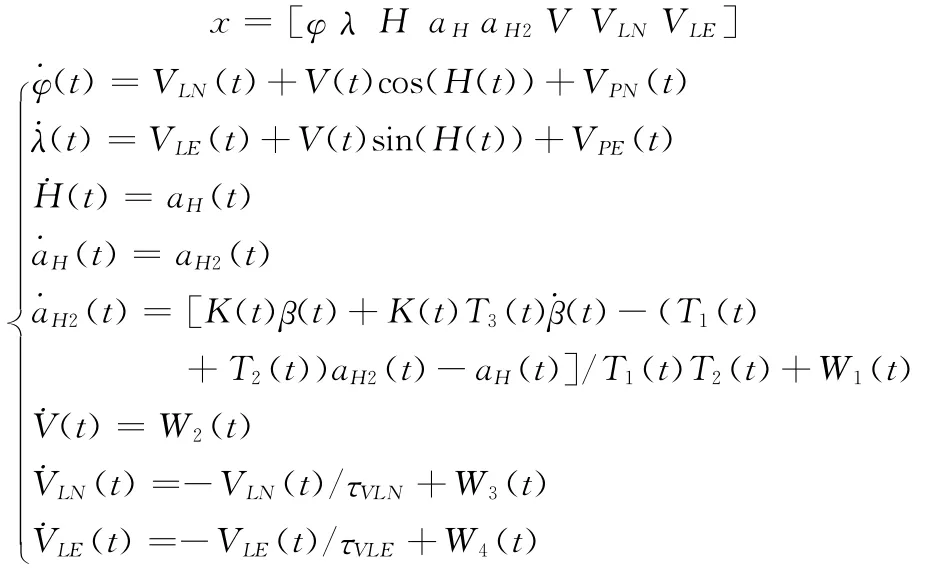
上述狀態(tài)方程中VPN、VPE、-1/τVLN、-1/τVLE分別為北向橫漂速度、東向橫漂速度、北向海流相關(guān)時間、東向海流相關(guān)時間,W1(t)、W2(t)、W3(t)、W4(t)為服從高斯分布的零均值白噪聲。
上述方程的狀態(tài)向量為八維,將該濾波模型整合劃分,示意圖如圖1。
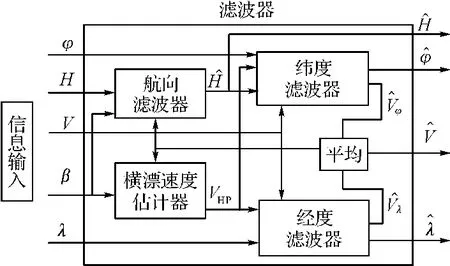
圖1 濾波器結(jié)構(gòu)圖
航向濾波器狀態(tài)方程:

緯度濾波器狀態(tài)方程:

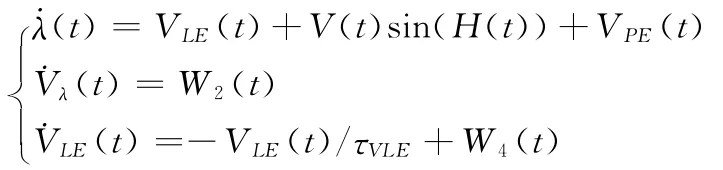
經(jīng)度濾波器狀態(tài)方程:
經(jīng)緯度濾波器觀測向量分別為:經(jīng)度、航速、緯度航速。
3.3 濾波方案設(shè)計
北斗二代無源導(dǎo)航系統(tǒng)已經(jīng)提供相關(guān)服務(wù)且精度與GPS相當,羅蘭C導(dǎo)航系統(tǒng)的定位精度將隨著ASF修正數(shù)據(jù)庫的逐步建立而逐步提高,方案設(shè)計如圖2所示。
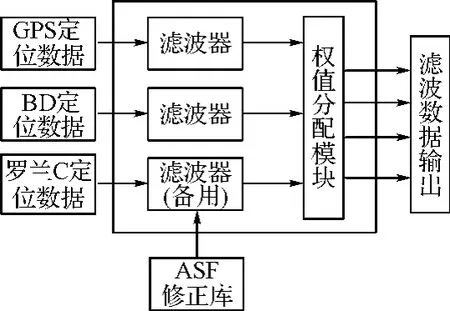
圖2 方案設(shè)計圖
系統(tǒng)檢測各信號源是否可信,由權(quán)值分配模塊決定各濾波器輸出數(shù)據(jù)的比重[9],由于羅蘭C定位數(shù)據(jù)經(jīng)ASF修正后,精度可進一步提高,這里作為備份使用[10],同時該系統(tǒng)也可以作為ASF數(shù)據(jù)測量之用[11]。
4 濾波方案仿真實驗
實驗分直線航行和直線+機動航行兩種情況,初始數(shù)據(jù):Δφ=20m、Δλ=20m、ΔH =0.5°、ΔV =1Kn、VLN=3.25Kn、VLE=3.82Kn、φ0=45°、λ0=45°、H0=10°、V0=20Kn。
航向濾波器:Q=diag([0 0 1e-4])、R=0.3、P0=diag([0.25 1e-4 1e-4])、x0=diag([10 0 0])。
經(jīng)緯度濾波器:τVLN=τVLE=3600s、Q=diag([0 1e-3 0.1])、R=diag([400 1])、P0=diag([400 0.5 0.8])、x0=diag([45 20 3])。
σ=20m。UKF濾波算法采樣點采用比例修正采樣策略,權(quán)值分配模塊GPS、BD、羅蘭C的設(shè)置分別為:0.5、0.5、0。
4.1 直線航行
以數(shù)據(jù)的初始設(shè)置為基礎(chǔ),船舶不操舵進行直線航行222s,航向、航速、經(jīng)緯度濾波的結(jié)果如圖3~圖5所示。
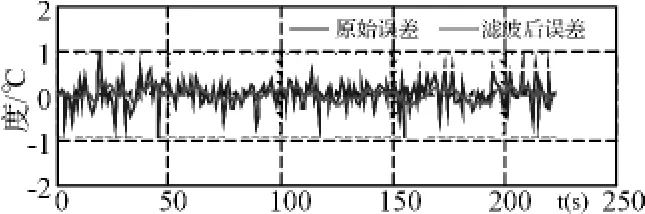
圖3 航向誤差濾波結(jié)果
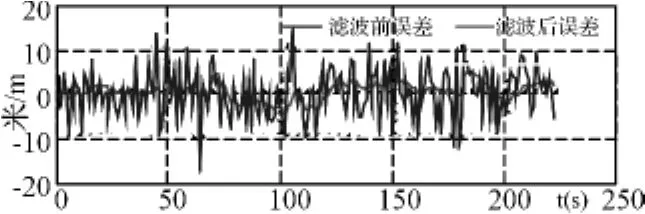
圖4 緯度誤差濾波結(jié)果
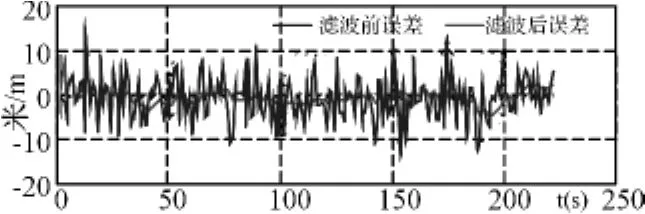
圖5 經(jīng)度誤差濾波結(jié)果
濾波結(jié)果證明改進后的UKF濾波算法結(jié)合本文提出的船舶操控模型,在直線航行階段能顯著的提高航向、航速、經(jīng)緯度的精度。
4.2 機動航行
總共航行666s。其中,在200s時,舵角打到8°,在300s時舵角恢復(fù)到0°,濾波結(jié)果如圖6~8所示。
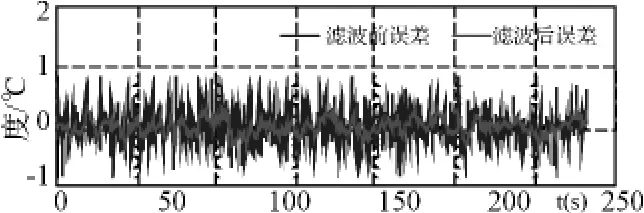
圖6 航向誤差濾波結(jié)果
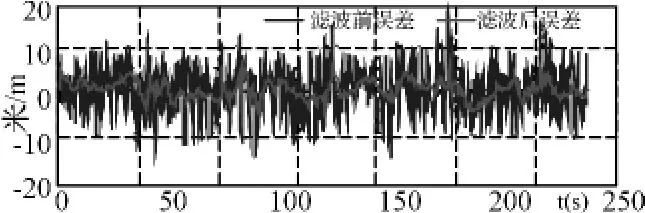
圖7 緯度誤差濾波結(jié)果
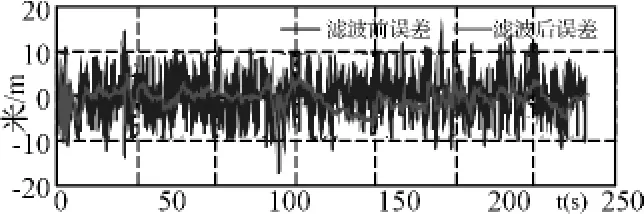
圖8 經(jīng)度誤差濾波結(jié)果
濾波結(jié)果證明改進后的UKF濾波算法能及時有效的提高船舶機動轉(zhuǎn)彎時的定位精度,濾波器的整體性能較好。
5 結(jié)語
實驗證明,基于船舶操控模型結(jié)合UKF改進算法的濾波器,保證了艦船在直線航行與機動轉(zhuǎn)彎時航向、航速、經(jīng)緯度的高精,證明了方案的可行性,對艦船濾波系統(tǒng)的設(shè)計有較高的參考價值和現(xiàn)實意義。
[1]董大瓊,陳永冰.基于舵角信息的航向修正和橫漂速度估計算法研究[J].艦船電子工程,2009,29(8):6568.
[2]劉星.UKF和EKF在衛(wèi)星姿態(tài)確定中的應(yīng)用研究[D].中國科學院,2007:2831.
[3]Giannitrapani A,Ceccarelli N,Scortecci F.Comparison of EKF and UKF for Spacecraft Localization via Angle Measurements[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):7584.
[4]王康,劉莉,杜小菁,等.基于UKF的GPS定位算[J].宇航學報,2011,32(4):795801.
[5]賈欣樂,楊鹽生.船舶運動數(shù)學模型[M].大連:大連海事大學出版社,1999:238250.
[6]齊立峰,陶建峰,馮新喜,等.一種改進的UKF非線性濾波器研究[J].彈箭與制導(dǎo)學報,2011,31(2):179188.
[7]胡迪,董云峰.基于自適應(yīng)UKF的敏感器故障診斷算法[J].北京航空航天大學學報,2011,37(6):639643.
[8]李文魁,周永余.艦艇綜合導(dǎo)航系統(tǒng)[M].武漢:海軍工程大學出版社,2004:162170.
[9]Huerta J M,Vidal J,Girmeus A.Joint Particle Filter and UKF Position Tracking in Severe NonLineofSight Situations[J].Selected Topics in Signal Processing,IEEE Journal of,2009,5(3):874888.
[10]周坤芳,徐志剛.建立ASF數(shù)據(jù)庫提高長二系統(tǒng)在臺灣海峽的定位精度[J].導(dǎo)航,2001,4:106110.
[11]高立,李文魁,陳永冰.羅蘭C TOAASF測量系統(tǒng)設(shè)計與實現(xiàn)[J].船電技術(shù),2010,30(8):2427.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學技術(shù)(2022年2期)2022-03-29 01:12:44
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03