全天候動態測試方法在慣性導航系統中的應用*
2013-08-10 09:04:06劉素珍雷忠山
艦船電子工程 2013年8期
劉素珍 雷忠山
(1.中國人民解放軍92941部隊95分隊 葫蘆島 125001)(2.中國人民解放軍92493部隊 葫蘆島 125001)
1 引言
進入二十一世紀以來,船用慣性導航裝備逐步向長周期、大海域、高精度方向發展,靶場目前的測控手段是利用天文經緯儀測得的航向和姿態信息真值與被試裝備輸出的姿態信息進行比對,達到海上試驗鑒定的目的。但是天文經緯儀系統只能做到晝夜測星,在測量過程中必須選擇天氣晴朗、天空背景與星體亮度對比度適宜的情況下才能進行測量,當導航設備重調周期比較短時,可以通過選擇好天氣進行測量,如果導航設備重調周期(航次)過長則不能實現全程測量。為了解決導航裝備試驗全周期海上動態精度測量問題,必須尋求一種長周期、全天候的航向和姿態真值測量手段,根據目前國內外技術發展狀況,可以利用射電天文導航的方式解決陰雨天氣條件下導航裝備全天候動態精度測量問題[1]。
2 射電天文導航原理
射電天文導航是將可見光天文導航技術系統與射電天文導航技術有機的結合在一起,構成一個組合導航系統,能夠實時提供慣性導航系統的航向和水平姿態誤差,實現自主式、全天候、全球性的慣性導航系統動態測試要求。射電天文定位指通過射電天文望遠鏡接收天線對準所要觀測的天體,匯集它投來的無線電波,接收機把無線電波的功率放大,成為可供記錄的信號,然后由終端記錄處理系統處理信息,并用圖、表或其他方式顯示出來,精確確定天體在天球上的位置,利用高度差法原理,確定載體的位置和方向。
射電測量系統主要由射電天線,天線饋源,高靈敏度射電輻射計和跟蹤接收機組成。
射電天線包括天線主、副反射面和饋源。天線饋源采用高效率波紋喇叭,天線罩采用低損耗材料,最大限度地降低對太陽和衛星信號的衰減,提高系統信噪比,射電輻射計的功能是對射電微弱信號進行測量,微弱信號檢測儀器的設計不僅要求噪聲小,而且還要同時滿足通頻帶,輸入阻抗和電路工作點穩定性等多種要求。
射電天文導航系統組成框圖如圖1所示[2]:
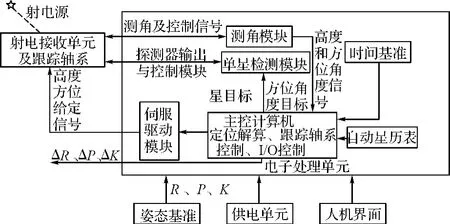
圖1 射電天文測量系統組成框圖
3 星體探測能力分析
太陽是一個理想的黑體,它輻射所有頻率的電磁波信號,在可見光波段,其輻射能量最強,在射電頻段,輻射較弱,但由于星際分子的吸收,同時再加上地球大氣的衰減,太陽的輻射到達地面時,在陰雨、霧天時,其射電信號能被接收,而可見光卻不能接收。宇宙的亮溫與輻射的波長和天頂角均無關,其值等于2.7K。頻率高于5GHz時,銀河系的亮溫比大氣向下的輻射溫度低很多,可以忽略不計。在頻率高于10GHz時,可以忽略所有外層空間輻射源對天線溫度的影響。決定輻射計靈敏度有兩個因素:一是輻射計的系統噪聲溫度;二是輻射計的增益起伏。射電接收單元的系統靈敏度可用下式表達[3]:

圖2 接收系統損耗圖
選擇系統積分時間為2s,帶寬為500MHz,圖2為接收系統損耗圖,其等效的(無噪聲器件)級聯模型如圖3所示。

圖3 接收系統損耗級聯模型圖
通過計算可以得到系統的靈敏度為:TSYS=0.154K;太陽的輻射強度為67K;月亮的輻射強度為14K;衛星的輻射強度比太陽月亮強。因此可以探測到衛星、太陽和月亮的射電信號。
4 射電天文接收機系統
系統采用0.9m口徑的天線,對衛星和太陽進行跟蹤測量,主要困難在于接收機所接收到信號非常微弱。對于微弱信號檢測來說,關鍵措施[4]就是盡量減少測量過程中引入的觀測噪聲,降低前置放大器噪聲是其中一個主要途徑。主要從低噪聲器件選擇及放大器電路設計上進行精心考慮,從抗干擾角度還要注意放大器的結構設計。在微弱信號檢測儀器的設計上,不僅要達到低噪聲,還要同時滿足通頻帶,輸入阻抗和電路工作點穩定等多種要求,此外,不僅要盡量降低內部噪聲,而且還要很好地排除外部干擾。外部干擾與內部噪聲不同,這種干擾通常具有一定的規律及傳送的途徑。因此,通過采取適當的措施就可以完全消除各種外部干擾,使檢測系統達到僅由內部噪聲決定的檢測極限。接收機系統[5]原理如圖4所示:
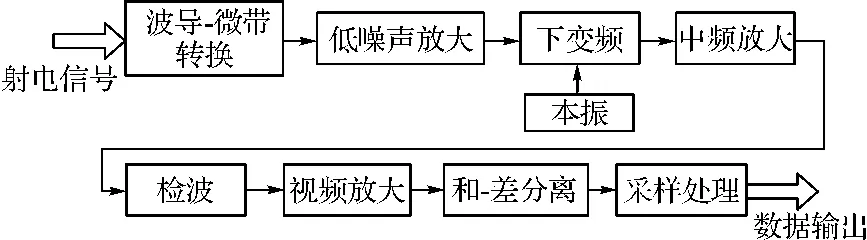
圖4 接收系統原理圖
由天線饋源接收射電信號后,經過波導-微帶轉換將電磁場信號轉化為電信號。該信號非常微弱,所以需要進行放大處理。需要注意這是第一級處理,所以要求放大過程帶入的噪聲必須非常小,才能保證有足夠的信號-噪聲比,保證系統具有很高的探測精度[6]。
信號放大后進行下變頻處理:即信號與本振信號頻率相減將接收的Ku波段信號降為L波段信號,此時信號形式不變,僅頻率降低。
下變頻后的信號依然很微弱,必須再進行放大處理。這里的放大與第一級放大不同,頻率比第一級要低,所以稱為中頻放大,而且也不需要追求很低的噪聲。
中頻放大后進行檢波處理,檢波處理是降L波段信號直接變為低頻電壓信號,稱為視頻信號。該視頻電壓信號已反映了目標偏離天線中心的程度,但信號還是很微弱。
所以檢波之后還需進行視頻放大處理,放大后進行和-差分離,即降視頻電壓信號分離出反映目標偏離天線中心的方位差和俯仰差。
分離出方位、俯仰角偏差后由CPU進行采樣數字化,再進行相應的濾波處理后通過串行口發送給主控計算機。
5 射電測天定位定向功能的實現
利用射電天線接收天體的射電信號,能夠克服可見光波段觀測受天氣的影響[7],利用小于1m口徑的天線,可以接收太陽、月亮、衛星等天線溫度較高的星體的厘米波射電信號,實現跟蹤星體測天定位。
5.1 射電源位置計算
根據標準的世界時和艦船位置信息,通過自動星歷表解算天文三角形,可以得到精確的太陽、月亮的位置(赤經、赤緯)和地平高度角、地平方位角。或者根據衛星測控中心提供的衛星位置數據和短期控制模型建立同步衛星的位置信息。
5.2 射電源的自動跟蹤和探測
根據天文結算得到的天體(衛星)的地平高度角和地平方位角對天體進行自動跟蹤和探測,將探測到的天體射電信號進行處理細分,提取射電源的位置信息,通過處理解算得到射電源的偏軸誤差量ΔA,ΔE。
5.3 射電源高度差計算
對被測星體的射電信號進行處理和目標提取,根據艦船位置信息(λ、φ)、姿態角信息 (K、P、R)、精確的時間信息,被測星體的高度角、方位角和射電源偏軸誤差量ΔA、ΔE,通過雙星定位或多星定位高度差計算公式得到被測射電源高度差Δhd和方位差Δqd。
5.4 定位解算
射電測量采用雙星和三星定位、定向原理,通過多次測量進行測量結果數據處理技術,進行數據平滑處理,優化定位、定向結果輸出。利用高度差法[8]進行雙星定位計算公式為
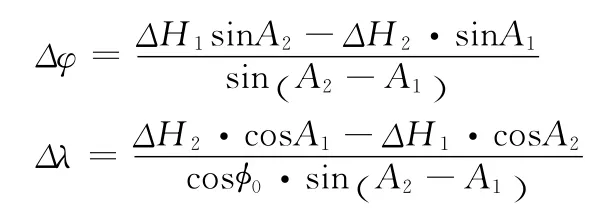
式中:ΔH1、ΔH2為兩顆星體的高度差;A1、A2為兩顆星體的方位;φ0為初始艦位緯度值。
根據雙星天文定位公式解算出的經度和緯度修正量Δλ、Δφ,加入初始位置即得到天文定位數據。

6 精度分析
6.1 定位精度
影響位置測量精度的主要因素有:高度測角誤差,天體檢測誤差,蒙氣差、視差等修正后的殘差。
6.1.1 高度測角誤差
根據目前的技術條件,角度傳感器可采用多極正余弦旋轉變壓器,測角傳感器在安裝及線路配置后,測角精度可控制在6″(1σ)。
6.1.2 天體檢測誤差
在天線口徑為1m,被檢測目標(衛星、太陽)在Ku波段的EIRP值[9]不小于50dB時,天線的半功率點波瓣寬度(HPBW)為1.4°,對系統噪聲、系統靈敏度、天線增益和天線溫度增量進行計算、仿真及相關試驗后,利用統計平均方法,對目標信息進行細分內插處理后,天體靜態檢測誤差θ≈30″。
6.1.3 蒙氣差、視差等修正后的殘差
蒙氣差、視差等修正后差余誤差取5″(1σ)。
按各項誤差均方和進行誤差綜合,系統在靜態條件下定位精度:

靜態定位誤差相當于0.3海里,但由于在測量不同目標時會引入一定誤差,因此靜態定位精度按0.4海里(1σ)計。
6.2 定向精度
在具體的使用條件下其定向的主要誤差源包括:天線指向誤差引入的方位測量誤差、方位測角誤差、軸系誤差導致的方位誤差、由高度測量引入位置誤差對定向誤差的影響、射電軸標校誤差等。
6.2.1 天線指向誤差引入的方位測量誤差
測星誤差30″,引入的方位測量誤差關系式為[11]
被測星體高度h為35°,則Δq約為36″。
6.2.2 方位測角誤差
方位測角精度可控制在5″(1σ)。
6.2.3 軸系誤差導致方位誤差
軸系誤差影響以7″(1σ)計。
6.2.4 由高度測量引入位置誤差對定向誤差的影響
定向時一般選用高度較低(35°以下)的星體進行測量,由射電探測時高度測量誤差引入的定向誤差為Wwz=24″。
6.2.5 射電軸標校誤差
射電標校精度誤差可以控制在20″以內。
按各項誤差均方和進行誤差綜合,系統在靜態條件下的定向精度:

7 結語
本文通過對探測天體(衛星)射電信號的可行性和探測精度進行分析,證明該方法在理論上是可行的,該方法對于克服不良天氣條件的影響,對慣性導航系統進行不間斷連續動態測試,具有重要意義。
[1]蔡迎波,李德彪.基于天文/GPS/慣性組合方式的慣導動態測試系統[J].中國慣性技術學報,2009,17(2):246.
[2]王振華,劉愛東.天體角度射電測量裝置的設計與試驗[J].光學與光電技術,2007,(4):33.
[3]王振華.天文導航技術與裝備的發展現狀及對策[J].光學與光電技術,2005,(5):7.
[4]宣揚.射電探測在天文導航技術中的應用[J].艦船科學技術,2009,(9):101.
[5]趙晨光,譚久彬,劉儉等.用于天文導航設備檢測的星模擬裝置[J].光學精密工程,2010,18(6):1327.
[6]朱長征,居永忠.影響天文導航系統定位精度的兩個因素分析[J].宇航學報,2010,31(10):2309.
[7]何炬.國外天文導航技術發展綜述[J].艦船科學技術,2005(5):91.
[8]楊爽.實時射電高精度天文導航技術研究[D].哈爾濱:哈爾濱工業大學,2008:56.
[9]李耀華.基于LMS的射電天文大天線抗干擾技術的研究與實現[D].長沙:國防科學技術大學,2011:78.
[10]戴邵武,馬長里,代海霞.北斗雙星/SINS組合導航中的捷聯慣導算法研究[J].計算機與數字工程,2010,38(2).
[11]周罡,唐建博,鄒志.一種高精度的天文導航姿態與航向解算模型[J].艦船科學技術,2009(5):4546.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45