艦船回轉(zhuǎn)拖曳線(xiàn)列陣水聽(tīng)器陣位預(yù)測(cè)研究*
2013-08-10 09:04:20萬(wàn)文彬曹留帥
艦船電子工程 2013年8期
關(guān)鍵詞:測(cè)量
萬(wàn)文彬 朱 軍 曹留帥
(海軍工程大學(xué)艦船工程系 武漢 430033)
1 引言
艦船輻射噪聲水平是隱蔽性的重要指標(biāo)。有多種因素要求艦船在整個(gè)服役期間周期性地監(jiān)測(cè)輻射噪聲。通常直接測(cè)量艦船輻射噪聲需要依賴(lài)被測(cè)艦船以外的支援,因此限制了艦船輻射噪聲監(jiān)測(cè)經(jīng)常性地開(kāi)展。國(guó)外研究人員Duncan[1~3]提出艦船機(jī)動(dòng)時(shí)通過(guò)拖曳線(xiàn)列陣的水聽(tīng)器來(lái)檢測(cè)本船的輻射噪聲。其中的關(guān)鍵技術(shù)之一就是艦船機(jī)動(dòng)時(shí)拖曳線(xiàn)列陣水聽(tīng)器相對(duì)本船的陣位確定問(wèn)題。
拖曳線(xiàn)列陣水聽(tīng)器相對(duì)本船的空間位置預(yù)報(bào)有水動(dòng)力學(xué)的方法等。朱軍等人[4~8]耦合船舶操縱性運(yùn)動(dòng)方程與拖纜動(dòng)力學(xué)方程,通過(guò)建立船纜動(dòng)力學(xué)模型提出了水動(dòng)力學(xué)的預(yù)報(bào)方法。Quinn[10]采用隱性 Markov(馬爾柯夫)算法估計(jì)了測(cè)量的陣形。Riley[11]則采用Kalman(卡爾曼)濾波方法對(duì)測(cè)量結(jié)果進(jìn)行了陣位預(yù)報(bào)。Quinn和Gray的陣位估計(jì)只是針對(duì)陣位為直線(xiàn)狀態(tài)。Duncan[3]認(rèn)為直接采用水動(dòng)力預(yù)報(bào)方法的結(jié)果偏差較大,因而將水動(dòng)力預(yù)報(bào)的陣間距和陣曲率作為偽觀測(cè)量,結(jié)合聲學(xué)測(cè)量量預(yù)報(bào)了船舶機(jī)動(dòng)時(shí)線(xiàn)列陣的陣位。
顯然,通過(guò)處理線(xiàn)列陣水聽(tīng)器觀測(cè)到的多個(gè)聲波發(fā)生器發(fā)射的信號(hào),可以比較好地獲得線(xiàn)列陣陣位,但是這需要開(kāi)展大量的測(cè)量工作和設(shè)置專(zhuān)門(mén)的測(cè)量裝置。一般艦船都裝備有主動(dòng)聲納,本文研究了僅僅依靠線(xiàn)列陣水聽(tīng)器所觀測(cè)到的本船主動(dòng)聲納信號(hào)實(shí)現(xiàn)線(xiàn)列陣陣位的預(yù)報(bào)。本文假定本船主動(dòng)聲納發(fā)射信號(hào)可為水聽(tīng)器所接收,稱(chēng)為觀測(cè)值。各個(gè)水聽(tīng)器的間距和曲率則采用水動(dòng)力學(xué)預(yù)報(bào)方法確定,稱(chēng)為偽觀測(cè)值,采用非線(xiàn)性最小方差曲線(xiàn)擬合(LM)算法,預(yù)報(bào)了艦船操舵定常回轉(zhuǎn)時(shí)的拖曳線(xiàn)列陣水聽(tīng)器的陣位,并討論了陣位最大偏差與觀測(cè)量標(biāo)準(zhǔn)差的關(guān)系。
2 陣位預(yù)測(cè)方法
2.1 觀測(cè)基本方程原理
聲學(xué)測(cè)量的基本方程為

Y為觀測(cè)矩陣;X為參數(shù)矩陣;f為參數(shù)變量到觀測(cè)變量的轉(zhuǎn)換函數(shù);e為均值為零的隨機(jī)噪聲矩陣,其協(xié)方差逆矩陣
為對(duì)角陣:
σi是各個(gè)觀測(cè)量的標(biāo)準(zhǔn)差。
式(2)表明,通過(guò)測(cè)量觀測(cè)量Y和轉(zhuǎn)換關(guān)系f,采用一定的算法可以擬合出所需要的參數(shù)X。一般采用非線(xiàn)性最小方差曲線(xiàn)擬合算法實(shí)現(xiàn)對(duì)參數(shù)的預(yù)測(cè)。本文采用了非線(xiàn)性最小方差曲線(xiàn)擬合的LM算法,以卡方χ2最小為收斂標(biāo)準(zhǔn):

2.2 觀測(cè)矩陣與參數(shù)矩陣的轉(zhuǎn)換關(guān)系
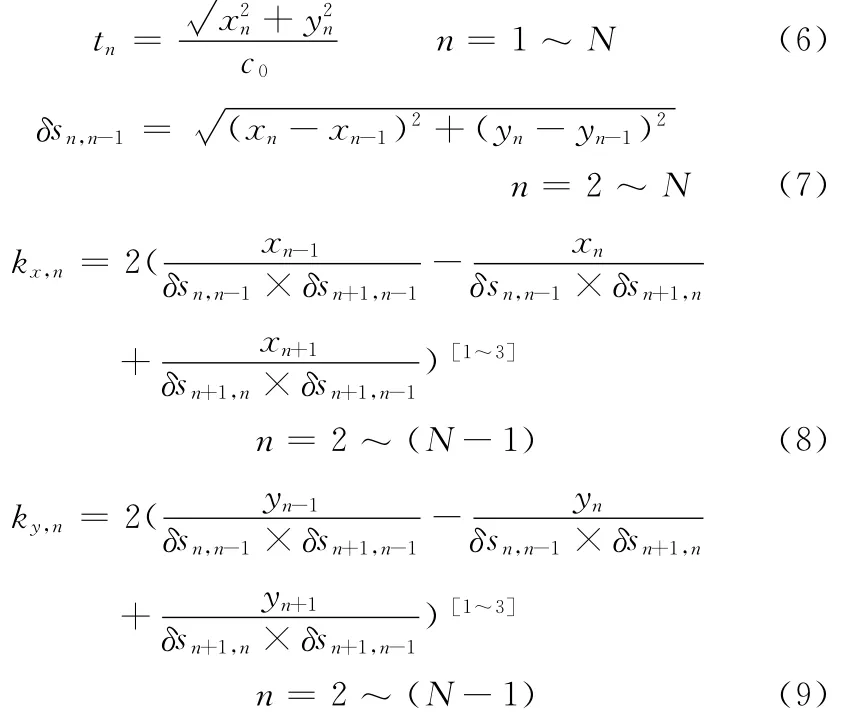
假定水聽(tīng)器個(gè)數(shù)為N,各個(gè)水聽(tīng)器相對(duì)艦船運(yùn)動(dòng)坐標(biāo)系的水平位置坐標(biāo)分別為xn、yn,假定聲發(fā)生器在艦船坐標(biāo)系的原點(diǎn),聲波由聲發(fā)生器傳播到各個(gè)水聽(tīng)器的時(shí)間為tn,該聲傳波所用時(shí)間為直接測(cè)量,稱(chēng)為觀測(cè)值。
水聽(tīng)器的參數(shù)矩陣為

水聽(tīng)器的觀測(cè)矩陣為

其中,δsi+1,i為第i+1個(gè)與第i個(gè)水聽(tīng)器之間的直線(xiàn)距離 (i=1,2,…,N-1);kx,j、ky,j分別為第j 個(gè)水聽(tīng)器的曲率在X和Y坐標(biāo)軸方向上的投影分量(j=2,…,N-1)。間距δsi+1,i、曲率kx,j和ky,j將從水動(dòng)力學(xué)預(yù)報(bào)的陣位參數(shù)中獲得,稱(chēng)為偽觀測(cè)值。
假定聲音在水中傳播的速度為c0,根據(jù)幾何關(guān)系不難得到觀測(cè)量與參數(shù)之間的轉(zhuǎn)換關(guān)系:
3 數(shù)值計(jì)算
本文取一個(gè)約800m長(zhǎng)的拖曳線(xiàn)列陣,利用水動(dòng)力學(xué)方法[4~7]預(yù)報(bào)的艦船操舵定常回轉(zhuǎn)時(shí)水聽(tīng)器的陣位作為想定的真陣,水聽(tīng)器個(gè)數(shù)為20。其中觀測(cè)時(shí)間是指本船主動(dòng)聲納所發(fā)射的脈沖信號(hào)到達(dá)各個(gè)水聽(tīng)器的時(shí)間。
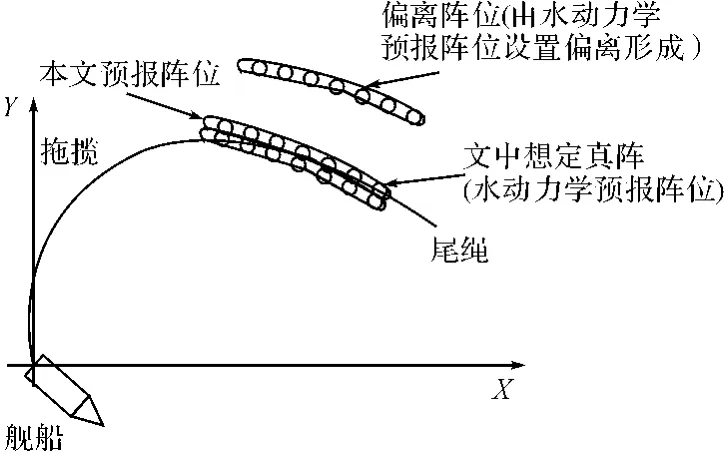
圖1 艦船回轉(zhuǎn)拖曳線(xiàn)列陣水聽(tīng)器陣位預(yù)測(cè)示意圖

表1 水聽(tīng)器陣位觀測(cè)值與偽觀測(cè)值
3.1 數(shù)值計(jì)算
本文根據(jù)觀測(cè)量,即式(5)中的測(cè)量時(shí)間、水聽(tīng)器間距、曲率作為輸入?yún)?shù),采用非線(xiàn)性最小方差曲線(xiàn)擬合的LM算法,擬合水聽(tīng)器陣位參數(shù),即式(6)中各水聽(tīng)器相對(duì)艦船坐標(biāo)系的坐標(biāo)位置。其中測(cè)量時(shí)間是直接觀測(cè)值,各水聽(tīng)器間距和水聽(tīng)器曲率為偽觀測(cè)值,偽觀測(cè)值來(lái)自水動(dòng)力學(xué)預(yù)報(bào)的數(shù)值。LM算法以卡方χ2最小為收斂標(biāo)準(zhǔn)。
時(shí)間觀測(cè)值來(lái)自直接的測(cè)量,即存在測(cè)量誤差,為了考察時(shí)間測(cè)量誤差對(duì)水聽(tīng)器陣位預(yù)測(cè)偏差的影響,在數(shù)值計(jì)算中取時(shí)間觀測(cè)標(biāo)準(zhǔn)差為0.01~0.1。本文中時(shí)間觀測(cè)標(biāo)準(zhǔn)差均為時(shí)間觀測(cè)誤差的標(biāo)準(zhǔn)差。
數(shù)值計(jì)算了初始陣位偏離和時(shí)間測(cè)量標(biāo)準(zhǔn)差對(duì)陣位預(yù)測(cè)的影響。
3.2 數(shù)值計(jì)算分析
1)初始陣位偏離對(duì)陣位預(yù)測(cè)的影響
初始陣位偏離程度用初始和真實(shí)陣位中心點(diǎn)至坐標(biāo)原點(diǎn)的距離差值與真實(shí)陣位中心點(diǎn)至坐標(biāo)原點(diǎn)的距離之比表示。如圖2為時(shí)間觀測(cè)標(biāo)準(zhǔn)差為0.01時(shí),初始陣位偏離度分別為5%、10%、15%、20%時(shí)預(yù)測(cè)的陣位,圖中計(jì)算結(jié)果表明初始陣位偏離度在20%以?xún)?nèi)均可以收斂到真陣上,表明LM算法具有很好的收斂性。
2)時(shí)間觀測(cè)組數(shù)對(duì)水聽(tīng)器陣位預(yù)測(cè)的影響
假定不同水聽(tīng)器時(shí)間觀測(cè)標(biāo)準(zhǔn)差相同,本文通過(guò)時(shí)間測(cè)量真值加觀測(cè)誤差的形式來(lái)模擬時(shí)間觀測(cè)值。觀測(cè)誤差用一組標(biāo)準(zhǔn)差恒定、均值為零的隨機(jī)數(shù)表示。圖3表明,在時(shí)間觀測(cè)標(biāo)準(zhǔn)差一定(σ=0.1)時(shí),時(shí)間觀測(cè)組數(shù)分別是100、500、1000、2000和3000的情況下,隨著時(shí)間觀測(cè)組數(shù)的增加,每一個(gè)水聽(tīng)器的統(tǒng)計(jì)觀測(cè)值(多次時(shí)間觀測(cè)量的統(tǒng)計(jì)平均值)越接近時(shí)間觀測(cè)真值,使用統(tǒng)計(jì)觀測(cè)值預(yù)測(cè)的陣位也與真陣越接近。
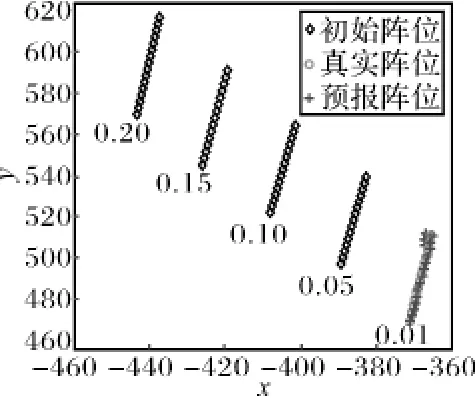
圖2 初始陣位偏離度的陣位預(yù)測(cè)
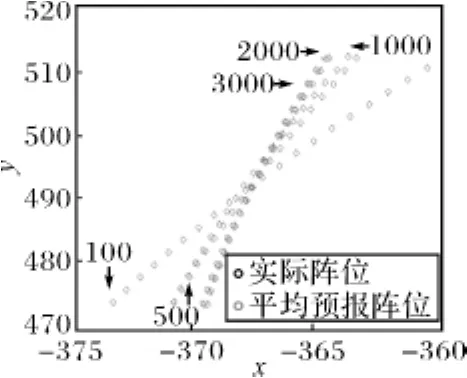
圖3 時(shí)間觀測(cè)組數(shù)分別為100、500、1000、2000、3000時(shí)陣位的統(tǒng)計(jì)預(yù)測(cè)結(jié)果
3)時(shí)間觀測(cè)標(biāo)準(zhǔn)差對(duì)陣位預(yù)測(cè)精度的影響
圖4給出了陣位預(yù)測(cè)結(jié)果的不確定性(偏差)方向圖,陣位中心點(diǎn)與想定陣偏差最小,陣位兩端偏差最大,沿x方向偏差較y方向偏差大。將陣位預(yù)測(cè)沿x方向端點(diǎn)的偏差作為最大偏差量,通過(guò)計(jì)算得到了最大偏差量與時(shí)間觀測(cè)標(biāo)準(zhǔn)差的相關(guān)曲線(xiàn)(圖5)。圖5中最大偏差相對(duì)量是指相對(duì)陣位中心水聽(tīng)器到船舶中點(diǎn)的距離,圖5結(jié)果表明:(1)陣位預(yù)測(cè)的精度與時(shí)間觀測(cè)量的測(cè)量精度有密切的相關(guān)性,時(shí)間觀測(cè)量的精度越高則陣位預(yù)測(cè)結(jié)果越好。(2)陣位預(yù)測(cè)最大偏差隨時(shí)間測(cè)量標(biāo)準(zhǔn)差呈現(xiàn)非線(xiàn)性變化,要得到較好的陣位預(yù)測(cè)結(jié)果必須將時(shí)間測(cè)量標(biāo)準(zhǔn)差控制在較小的范圍。
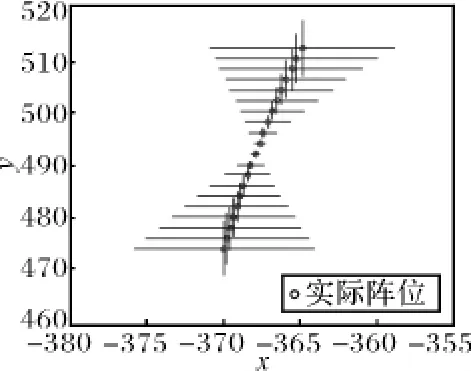
圖4 時(shí)間測(cè)量標(biāo)準(zhǔn)差與陣位預(yù)測(cè)方向偏差的相關(guān)性
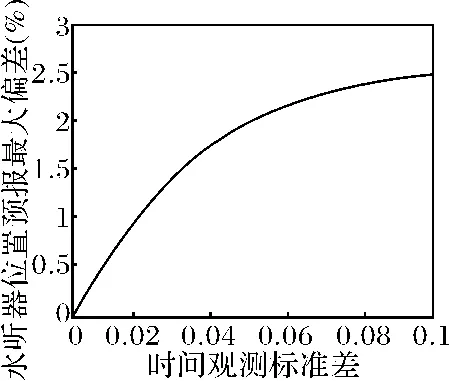
圖5 時(shí)間測(cè)量標(biāo)準(zhǔn)差與陣位預(yù)測(cè)偏差的相關(guān)性
4 結(jié)語(yǔ)
本文基于觀測(cè)方程基本原理建立了艦船回轉(zhuǎn)拖曳線(xiàn)列陣陣位預(yù)測(cè)的基本方程,推導(dǎo)了觀測(cè)矩陣與參數(shù)矩陣的關(guān)系式,以水動(dòng)力學(xué)預(yù)報(bào)的水聽(tīng)器陣位作為想定陣形。采用非線(xiàn)性最小方差曲線(xiàn)擬合(LM)算法預(yù)測(cè)了水聽(tīng)器陣位,討論分析了算法的收斂性、陣位預(yù)測(cè)的可行性以及陣位預(yù)測(cè)精度與時(shí)間觀測(cè)量標(biāo)準(zhǔn)差的相關(guān)性。根據(jù)計(jì)算研究認(rèn)為:
1)非線(xiàn)性最小標(biāo)準(zhǔn)差曲線(xiàn)擬合(LM)算法可實(shí)現(xiàn)僅基于本船信息預(yù)測(cè)艦船定常回轉(zhuǎn)拖曳線(xiàn)列陣的陣位;
2)陣位預(yù)測(cè)的最大偏差出現(xiàn)在水聽(tīng)器陣位的兩端,陣位中心點(diǎn)的預(yù)測(cè)與想定陣位一致;
3)陣位預(yù)測(cè)精度與時(shí)間觀測(cè)標(biāo)準(zhǔn)差呈現(xiàn)非線(xiàn)性關(guān)系,提高陣位預(yù)測(cè)精度的有效措施是降低時(shí)間觀測(cè)量的標(biāo)準(zhǔn)差和提高時(shí)間觀測(cè)的次數(shù)。
本文研究為基于本船信息預(yù)測(cè)艦船回轉(zhuǎn)拖曳線(xiàn)列陣陣位提供的方法,有待于今后試驗(yàn)檢驗(yàn)。
[1]Duncan,A.J.,McMahon,D.R.Using a Towed Array To Localize and Quantify Underwater Sound Radiated by The TowVessel[C].Australian Acoustical Society Conference.Joondalup,Australia,2000,11:1517.
[2]Duncan,A.J.The measurement of the underwater acoustic noise radiated by a vessel using the vessel's own towed array[D].Curtin University of Technology,2003.
[3]Duncan,A.J.,Penrose1,J.D.Measurement of radiated noise using a vessel’s own towed array–aprogress report[C].Proceedings of ACOUSTICS.Gold Coast,Australia,2004,11:35.
[4]朱軍,劉軍.拖纜系統(tǒng)回轉(zhuǎn)運(yùn)動(dòng)仿真計(jì)算[J].海軍工程大學(xué)學(xué)報(bào),2001,13(4):2228.
[5]劉軍,林超友,朱軍.艦船回轉(zhuǎn)運(yùn)動(dòng)時(shí)拖曳聲納陣位預(yù)報(bào)[J].海軍工程大學(xué)學(xué)報(bào),2002,14(2):8084.
[6]朱軍,劉軍,鄧志純.潛艇雙拖系統(tǒng)運(yùn)動(dòng)仿真計(jì)算研究[J].船舶力學(xué),2003,7(5):3338.
[7]曾廣會(huì),朱軍.潛艇水下機(jī)動(dòng)時(shí)拖曳線(xiàn)列陣陣位預(yù)報(bào)與參數(shù)分析[J].哈爾濱工程大學(xué)學(xué)報(bào),2009,30(7):723727.
[8]程廣濤,朱軍,曾廣會(huì).基于拖曳線(xiàn)列陣聲納的噪聲監(jiān)測(cè)仿真算法[J].聲學(xué)技術(shù),2009,28(4):472475.
[9]Dosso,S.E.,Riedel,M..Array element localization for towed marine seismic arrays[J].Journal of the Acoustical Society of America,2000,110(2):955966.
[10]Quinn,B.G.,Barrett,R.F.,Kootsookos,P.J.&Searle,S.J.The estimation of the shape of an array using a hidden Markov model[J].IEEE Journal of Oceanic Engineering,1993,18(4):55764.
[11]Riley,J.L.&Gray,D.A.Towed array shape estimation using Kalman filtersexperimental investigations[J].IEEE Journal of Oceanic Engineering,1993,18(4):57281.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00