TF控制在火電單元機組的應用
2013-08-15 07:46:50周瓏
電氣技術 2013年7期
關鍵詞:汽輪機
周瓏
(百超(上海)精密機床有限公司,上海 200135)
在我國大型火力發電廠的熱工控制系統中,為解決負荷控制過程中內外能量平衡問題,并依據單元機組的負荷控制特點,單元機組的協調控制系統的概念(Coordinated Ccontrol System,簡稱CCS)被提出來。廣義上來說,也可以稱之為單元機組負荷控制系統,在其綜合控制下,汽輪發電機和鍋爐成為一個整體,根據內部運行參數及電網負荷需求,機組可同時完成協調運行。一方面對內可以使得主蒸汽壓力偏差維持在允許范圍內,另一方面也可以使其對外具有良好的調頻能力及較快的功率響應。
1 協調控制方式分類
常見的機組協調控制方式有以下幾種方案:
1)以鍋爐跟隨為基礎的協調控制方式(簡稱BF)
該方式是在汽輪機側控制負荷(輸出電功率)PE、鍋爐側控制主蒸汽壓力pT的基礎上,讓汽輪機側的控制配合鍋爐側控制pT的一種協調控制方式。在實際應用中,它還包括不完全BF方式,即汽輪機側控制負荷,鍋爐側手動調節燃燒及主汽壓力。
2)以汽輪機跟隨為基礎的協調控制方式(簡稱TF)
該方式是在鍋爐側控制負荷(輸出電功率)PE、汽輪機側控制主蒸汽壓力 pT的基礎上,讓汽輪機側的控制配合鍋爐側控制PE的一種協調控制方式。在實際應用中,它還包括不完全TF方式,即汽輪機側控制主蒸汽壓力,鍋爐側手動調節燃燒及機組負荷。
3)綜合型協調控制方式(簡稱CCS)
該方式能較好地保持機組內、外兩個能量供求的平衡關系,即具有較好的負荷適應性能,又具有良好的汽壓控制性能,是一種較為合理和完善的協調控制方式,但系統結構較為復雜,對主/輔設備的性能、燃料熱值穩定等方面要求較高。
另外,在實際運行中,還有一種手動調節鍋爐出力和機組負荷的方式BASE,該方式對運行人員的操作要求較高,蒸汽參數及機組負荷控制起來有較大的難度。
2 TF方式的特點
該廠機組控制方式一般采用BF或 CCS,下面主要分析的是我廠 2×300MW 機組事故情況下采用較多的TF控制方式,尤其是不完全TF方式,它在機組的盡快恢復穩定運行,減少控制人員的操作難度方面具有突出的表現,該廠控制員利用此方式多次化解機組運行險情。下面先對TF方式作一下簡要的介紹。
以汽輪機跟隨為基礎的協調控制方式如圖1所示。
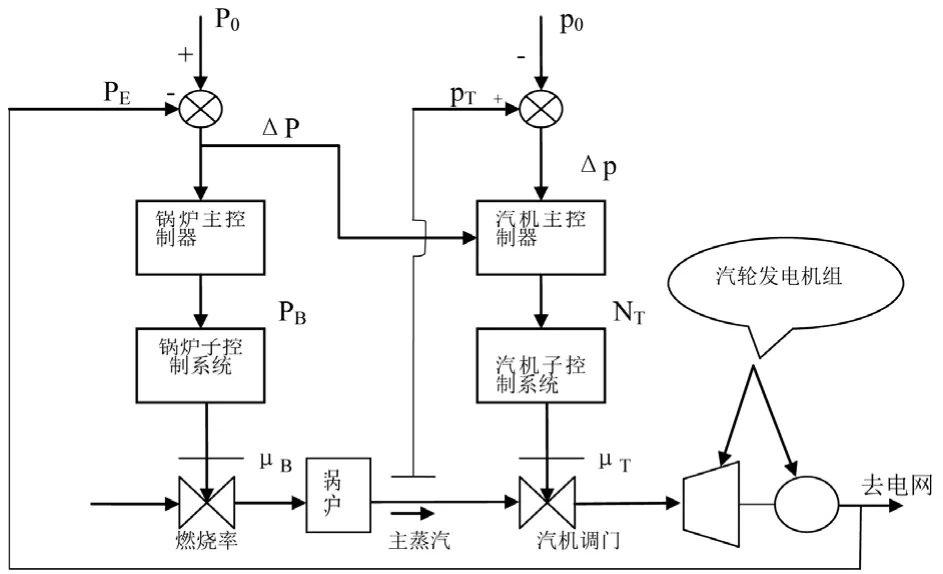
圖1 以汽輪機跟隨為基礎的協調控制方式
鍋爐的主控制器接受機組負荷指令P0(功率給定值)和機組實發功率反饋信號PE;當負荷指令P0改變時,產生負荷偏差ΔP=P0-PE,鍋爐主控制器依照此偏差值調控子控制系統指令PB,進而使鍋爐燃燒率(包括相應的給水流量等)得以改變,并最終適應負荷的能量需求。
汽輪機主控制器接受主蒸汽壓力的給定值p0和機前實際主蒸汽壓力反饋信號pT,當鍋爐側調負荷或某些因素導致主蒸汽壓力值pT改變時,產生汽壓偏差Δp= p0-pT,汽輪機主控制器依此調節其子控制系統的負荷指令NT,使得進汽流量及進汽調節閥的開度μT隨之改變,從而保證主蒸汽壓力pT的穩定。
該協調方式是以加大汽壓動態偏差為代價來換取負荷響應速度的提高的。由于這種協調控制方式直接由負荷指令控制燃燒率,可以說它是通過加快鍋爐側的負荷響應速度,使機爐之間的動作達到協調的。
而不完全TF方式屬于TF控制應用的一種擴大型,在該廠300MW 機組也應用較多,即汽輪機側控制主蒸汽壓力,鍋爐側手動調節燃燒及機組負荷,相比完全TF方式,后者在機組鍋爐側主/輔設備故障、鍋爐子控制系統故障、RB保護動作的情況下,對于機組控制員更好的掌控機組運行,使機組盡快恢復穩定方面的作用尤為突出。因為在實際發電生產中,鍋爐子系統出故障及主要輔機故障的機率較高,諸如制粉系統、空預器、給水泵、引送風機等故障跳閘,一旦出現這些情況,鍋爐主控制器將無法投入自動,鍋爐燃燒、水位、主蒸汽參數極易大幅波動,機組負荷也難以穩定,一旦控制不好就可能造成鍋爐MFT,機組跳閘。由于現在廣泛推行全員值班制度,一臺 300MW 機組僅兩人控制,在事故面前,如何合理分工,抓住主要參數,才能騰出手來盡快明晰故障類型及危險點,將機組控制穩定。而主汽壓力就是這個主要參數,只有這個參數盡可能穩定,才能為鍋爐燃燒、水位等調整創造良好條件,控制員才不至于受忙腳亂,顧此失彼,不完全TF方式正好適應了這種工況,雖然犧牲了機組負荷(可由值長及時向調度申請機組負荷調頻減少不合格電量),但穩住了主汽壓力,有利于控制員專心調整燃燒和水位,盡快將機組穩定下來,下面舉一個該廠發生的機組跳閘案例來印證不完全TF方式的合理利用對機組穩定運行的作用。
3 案例分析
3.1 事故經過
2006年04月25日17:06,#4機帶負荷240MW,A送風機突然跳閘,A送風機跳閘后,機組RB保護動作,E層給粉機跳閘,主汽壓力下降,機組自動快速減負荷至142MW,控制員立即增大天然氣流量以穩定鍋爐燃燒,同時手動調整引、送風機維持負壓和正常風量,鍋爐燃燒得以維持。17:12 A送風機投運正常,此時機組負荷在142MW,主汽壓力回升,立即投負荷控制,目標負荷200MW,負荷率15MW/min,機組開始加負荷,同時繼續增加汽泵轉速,17:14主汽壓力上升趨勢加快,汽包安全門動作,汽包水位迅速下降,給水流量下降,最后到零,繼續增加汽泵轉速仍不見給水流量回升,17:16水位降至-350mm鍋爐MFT動作,汽機跳閘,發電機解列。
3.2 原因分析及處理過程
分析認為:17:06分,A送風機突然跳閘,RB保護動作。由于鍋爐、燃料、汽機的主控均以手動方式控制,DEH處于負荷控制方式(即不完全BF)。RB動作后,汽機主控隨之自動強切,機組處于汽機跟隨方式。也就是說,當主汽壓力增大時,調節汽機調門用以阻止主汽壓力提高;相反,當主汽壓力下降時,使汽機調門關小,以保證主汽壓力平衡。通過歷史曲線不難看出,RB發生后,在約3min的時間內,DEH負荷從240 MW迅速下降到145 MW,同時,主汽壓力從16.59 MPa跌至16.066 MPa,而后趨于穩定。整個TF控制期間,主汽壓力的波動不是十分明顯。可以看出,在沒有采取其它的穩壓方式時,若不能快速減小負荷,就不能保證主汽壓力維持在允許范圍。保證主汽壓力,雖然是以犧牲功率為代價,但同時也保障了其他的參數的穩定。17:10:03,工作人員切除TF運行方式,DEH處于負荷控制,這種情況下,升負荷率影響負荷的增減。據廠家資料,DEH和MCS中升負荷率范圍處于 0~15MW 之間,超出范圍的設定則無效。17:11min,主汽壓力上升,2min后呈快速上升趨勢,工作人員進行增加負荷,因受升負荷率限制,快速開大汽機調門不能使鍋爐壓力維持平衡,導致主汽壓力持續上升。17:15:54,安全門動作發生,DEH負荷為158.7 MW,主汽壓力18.66 MPa,低于其最大限19.633 MPa。
另外還需指出,TF方式下鍋爐壓力的穩定過程是十分快速的,其中DEH控制器不受升負荷率的限制,MCS中汽機調門受汽機主控輸出直接控制。我們知道,在汽包的壓力突然下降時,爐水的飽和溫度隨壓力相應下降,從而放出大量熱進行自行蒸發,引起爐水內汽泡增多,體積膨脹,致使水位上升,形成一個虛假的水位。而在汽包的壓力突然提升時,使得與之對應的飽和溫度也隨之提高,其中產生的一些熱量被用來對爐水進行加熱,減少蒸發量,因此爐水內汽泡減少,體積減少,從而使得水位下降,同樣形成一個虛假水位。因此,RB動作發生,汽機主控強投維持主汽壓力,有其相應的理論支持。此次RB觸發后3min,工作人員切除TF方式,DEH進入負荷控制,在恢復A送風機以后,由于未采取其它有效措施將主汽壓力得以有效控制(注:鍋爐主控、燃料主控在手動),致使安全門動作,給水位控制帶來很大難度。分析任為:引起鍋爐汽包水位低Ⅲ值MFT動作機組跳閘的主要原因是作為控制員在恢復送風機時未注意鍋爐燃料的投入,送風量的匹配,引起主汽壓力回升,加之又將TF方式切除,投入負荷控制,使得加負荷受限,從而主汽壓力升高,鍋爐安全門動作。造成鍋爐進水困難,機組因汽包水位低跳閘。
4 結論
通過上述分析,筆者認為作為運行人員,特別是機組控制員要進一步加強學習,特別是要了解熱工保護動作邏輯,掌握不同工況下機組的控制方式并加以合理應用,加強在事故處理中的溝通和聯系,要經常做好各類事故預想,提高事故處理能力。當前,我國火電機組發電小時數大幅下降,運營成本持續上漲,在川火電機組發電形勢更為嚴峻,因此切實抓住難得的發電機遇,練好內功,保證機組穩定運行顯得尤為重要。
[1]鄭體寬.熱力發電廠[M].北京:水利電力出版社,1995.
[2]高偉.計算機控制系統[M].北京:中國電力出版社,2008.
[3]湖北襄樊發電有限責任公司編著.汽輪機設備及運行[M].北京:中國電力出版社,2003.
[4]湖北襄樊發電有限責任公司編著.燃煤鍋爐機組[M].北京:中國電力出版社,2003.
[5]肖大雛.火電廠計算機控制[M].北京:水利電力出版社,1995.
[6]高偉.論火電廠綜合自動化[J].華中電力,1999(3).
猜你喜歡
能源工程(2021年3期)2021-08-05 07:25:58
能源工程(2020年5期)2021-01-04 01:29:00
電子制作(2019年22期)2020-01-14 03:16:38
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
當代化工研究(2016年7期)2016-03-20 16:21:50
電測與儀表(2015年11期)2015-04-09 11:46:40
機電信息(2015年6期)2015-02-27 15:55:15
機械制造與自動化(2014年1期)2014-03-01 04:21:47
河南科技(2014年24期)2014-02-27 14:19:40
