慧魚智能化立體旋轉停車庫的創新設計*
2013-08-18 07:44:16蒯蘇蘇陳寒松孫明權吳動波
機電工程技術 2013年8期
蒯蘇蘇,陳寒松,孫明權,吳動波,張 闖,楊 君
(江蘇大學,江蘇 鎮江 212013)
0 引言
智能機械是由執行機構、控制器、伺服驅動系統、檢測傳感裝置及智能材料構成,是一種仿人操作、自動控制、可重復編程、能在三維空間完成各種作業的機電一體化自動化設備,適合于多品種、變批量的柔性生產。以慧魚創意組合模型為平臺,以機械原理及設計、控制工程基礎、微機原理及應用等為先修課程,在涉及機械學、計算機技術、傳感器技術、人工智能等多學科理論的基礎上,本文設計了一種智能化立體旋轉停車庫,并對復雜智能產品開發問題和控制運動特性矩陣的理論方法進行了深入研究。
1 建立產品功能模型
“智能立體旋轉停車庫”,創意來自于立體旋轉式能充分地利用空間,每個車庫可以在電機M1驅動“蝸輪蝸桿——齒輪傳動”的二級傳動下旋轉,其二級傳動的組合效率η=0.95×0.96=0.912,傳動方案克服了帶傳動易打滑的缺點,在合理分配蝸輪蝸桿——齒輪傳動比的基礎上[1],車庫可靈活地循環,自動伸縮,結構新穎,自動化程度好。
根據TRIZ理論中的“Stone的功能結構”,首先建立智能立體旋轉停車庫的總功能模型,如圖1所示,然后完成各功能的解。
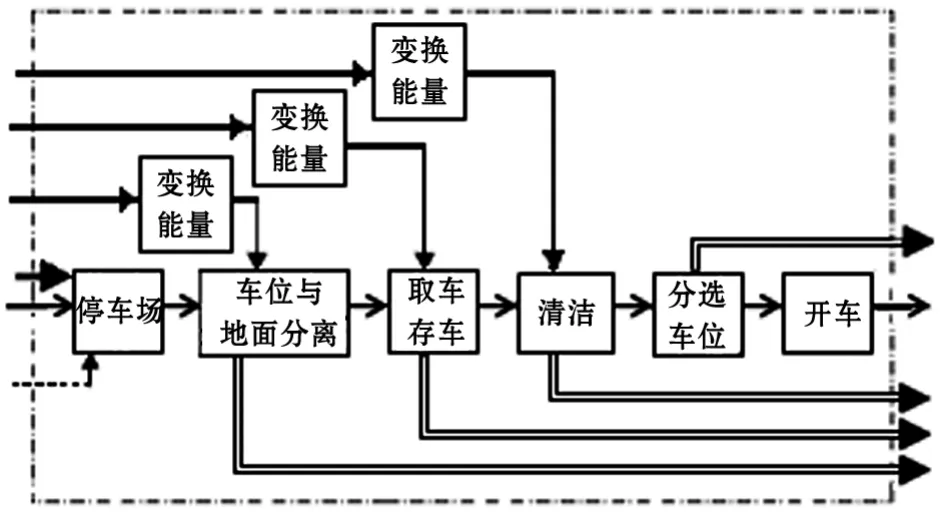
圖1 智能車庫功能結構
1.1 分功能1:停車場
設計車庫底板(P板)的面積為定值,庫門采用電磁閥控制氣動門。圖2是一電磁閥開關的工作原理圖。該開關有兩種狀態:“打開”與“閉合”,氣動門與車庫用鉸鏈連接,若操縱車庫的氣動門,使氣缸處于進氣,氣動門開;或氣缸處于排氣、氣動門關的狀態。車庫P板底面積與所允許通過的電流成正比。
圖2 電磁閥開關控制氣動門的工作原理圖
原設計空車位所通過的額定電流為0.5 A,現希望再設計使存車庫其額定電流增加到1 A,車庫的體積保持不變。基于TRIZ中公理(AD)理論設計的沖突確定如下。
該車庫原設計的功能與設計參數為:
FR1:電磁閥電機M4電流;DP1:車庫P板的面積。此時,設計的約束為:C01:通過的電流0.5A;C02:P板的面積為定值。
由于P板面積與所允許通過的電流成正比,計算表明再設計中P板的面積加大才能滿足增大電流的要求。但板的面積加大要使車庫的體積加大,不滿足約束。因此再設計約束出現沖突。故P板處需創新設計運動機構,一個創新的伸縮機構可解決該沖突。
創新的P板運動機構組成:在P板上疊加一個伸縮平板,伸縮平板下安裝有定軸輪系和螺旋絲杠,P板上安裝齒輪齒條機構、齒輪減速箱和電機M2(圖3(a)),再在P板上安裝有電子觸點開關,改變電流控制電機M2的正反轉,即可驅動定軸輪系帶動螺旋絲杠傳動并改變移動方向,同時也帶動齒輪齒條機構嚙合傳動,實現控制伸縮平板中伸縮機構的平穩運動,如圖3(b)所示。
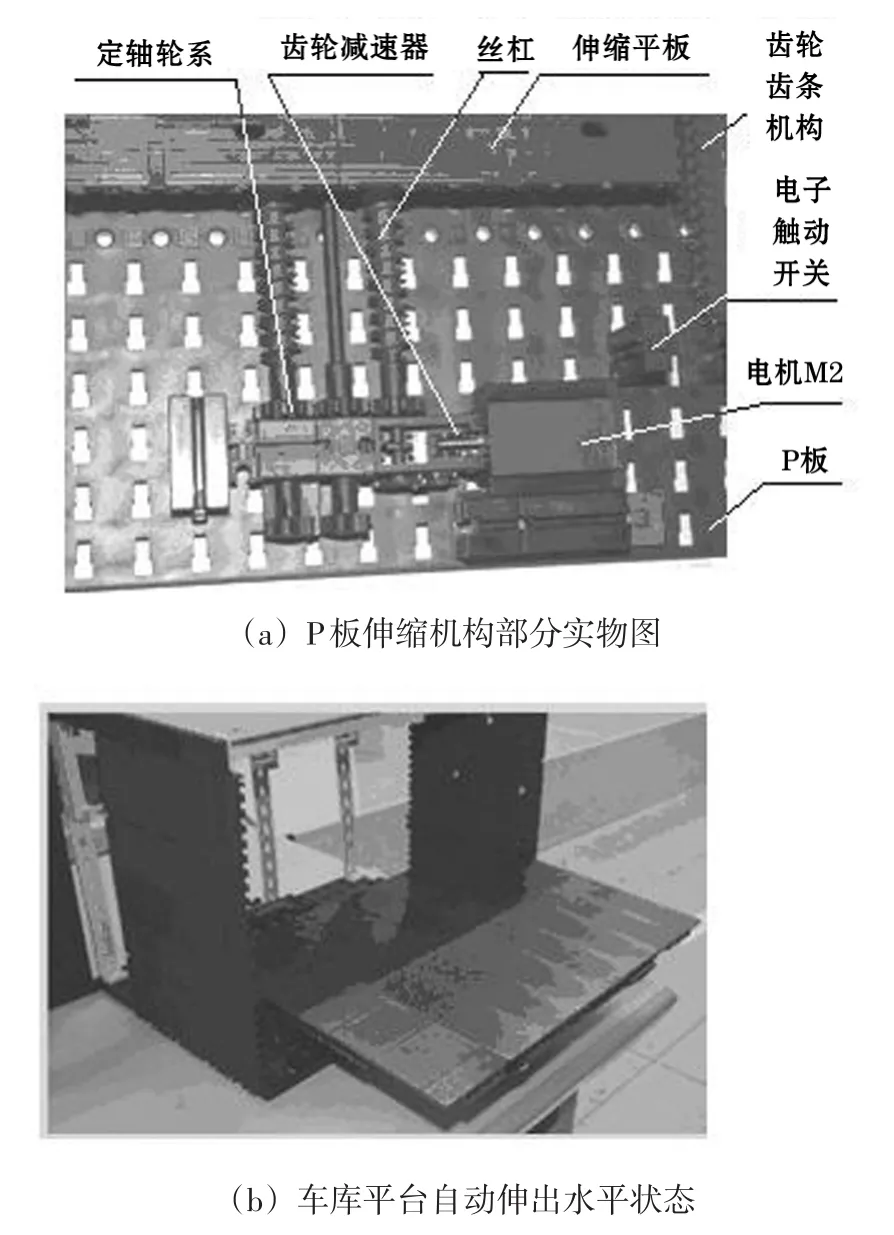
圖3 車庫平臺伸縮機構的方案設計
該車庫再設計的功能與設計參數為:
FR2:電機M2電流;DP2:P板伸縮機構。設計的矩陣式為非耦合設計[2],即:

公式(1)為對角線矩陣,設計控制解是完全解耦的,滿足公理(AD)理論設計,
再設計的約束為:C11:通過的額定電流1 A;C12:車庫的體積不變;當停車庫氣動門打開,伸縮板伸出,車庫底面積增大,存車(或取車)后伸縮板縮進,氣動門關閉,車庫的體積保持不變。伸縮機構與氣動門的邏輯關系見表1。
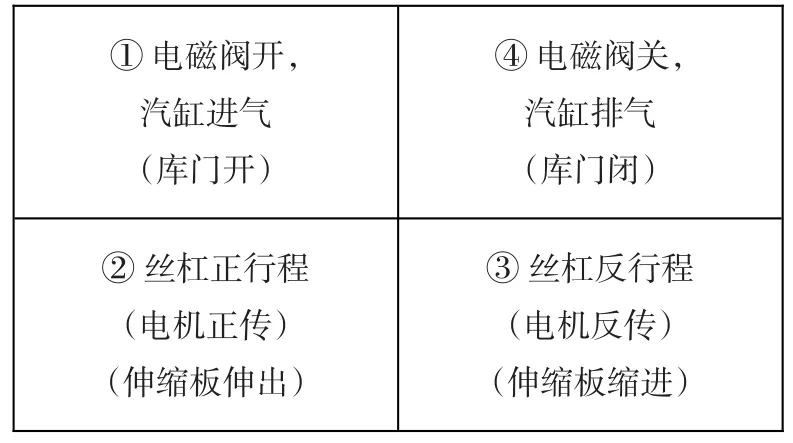
表1 伸縮機構與氣動門的運動順序
1.2 分功能2:車位與地面分離
使用“摩天輪”式轉盤結構。轉盤軸心處安裝一個固定的中心輪,每60°安置一齒輪和鏈傳動與中心輪嚙合。在每個行星輪系的系桿上安裝一個“停車庫”停放1輛私家車,一個“摩天輪”可停放6輛車。電機M1驅動“蝸輪蝸桿——行星輪系”時,轉盤轉動,車庫與地面分離。SolidWorks建模的旋轉停車庫見圖4(a)。
由于汽車行走的是二維軌跡,用TRIZ中40個發明原理中的第15個原理“動態化”,概念設計時將智能車庫的執行機構劃分成具有相互關系的齒輪機構,形成動態車庫解決車輛停放的空間化,采用行星輪系可實現將一維空間中靜止的停車庫變成在二維空間中運動或靜止的停車庫,在二維空間中的車位變成三維空間中的運動的車位。
該技術系統包含一個在重力作用下中心輪繞軸運動的物體,而且必須控制這個運動,問題可以通過給物體引入一種以控制的方式,在物體內運動的物質來移動物體的重心進行解決,需建立物-場模型。對照TRIZ中76個標準解,選用標準解法第2級:S2.1向合成物-場模型轉化[3],S2.1.1鏈式物-場模型來解決問題。如圖4(b)所示,其中F1為電能,S1為行星輪系,S2為車庫;為保證車庫在旋轉時無相對滑動,添加物質S4,S4為鏈傳動裝置(并聯在行星輪上),F2為機械能,S3為在旋轉的過程中不至于出現倒置和搖晃的車庫。
行星輪系及鏈傳動復合傳動裝置[4],達到了將車庫用多層排列代替單層排列的狀態,如圖4(c)所示。在圖4(c)中,用三角固定桿固定中心齒輪,利用輪系中齒輪間的相互嚙合,以無側隙嚙合保證車庫在旋轉的過程中時刻保持相對水平位置,當3號齒輪固定不動時,齒輪2和齒輪4保持相對位置做行星運動,齒輪1和齒輪5的旋轉方向與齒輪3一致。由于齒輪3固定,所以齒輪1和齒輪5也相對靜止。這樣能保證車庫在旋轉的過程中始終水平。從而達到改善接觸運動物體面積的根本目的。
1.3 分功能3:存車和取車
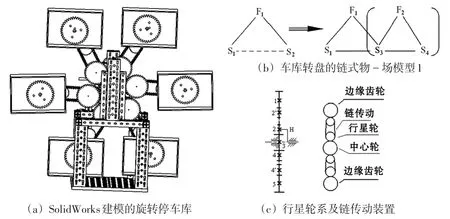
圖4 立體旋轉停車庫結構設計
當一輛轎車進入停車場要求停車時,發散思維的工作流程為:信息輸入→旋轉臂旋轉(行星輪系的系桿)→識別車位→伸縮板伸縮等步驟并進行模塊化設計,過程控制采用循環軟啟動模式[5],工作流程如圖5所示。
手按車主“所需車位按鈕”觸點開關[6],“摩天輪”根據相應的停車位信息指令要求,“旋轉臂旋轉”行星輪系傳動,選定的“車主庫號”車位到達接近地面距離最近時,電子觸動開關呈“打開”狀態,車庫平臺自動伸出,轎車開入停車庫中的一個車位后,車庫出入口裝有感應開關,在檢測到車輛存放進去且人員離開后,車庫平臺自動縮進,電子觸動開關呈“閉合”狀態,然后“摩天輪”旋轉使之離開此位置,并將空車位的系桿旋轉到達地面位置等待下一輛車的到來。當要求取出存放在車庫里的轎車時,只需在控制端輸入所存車庫的對應編號使“摩天輪”旋轉到地面位置由車主將車開出,整個過程完成。
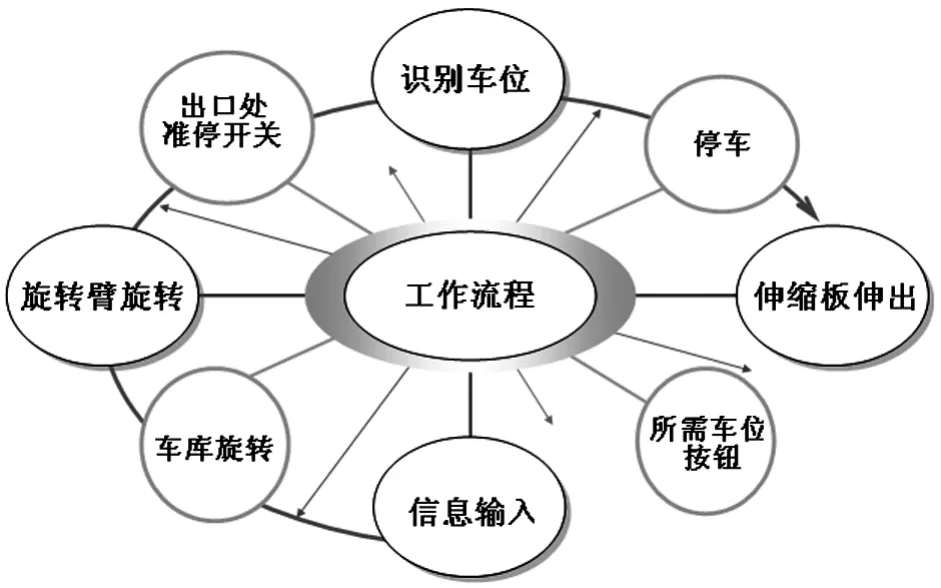
圖5 工作流程圖
1.4 分功能4:清潔裝置
圖6是一種自動清潔裝置,電機M3帶動鏈條傳動,用來傳輸動力到洗車板上;通過編程調用子程序控制清洗電機M3正反轉,使得洗車連接器如毛刷來回運轉,齒條和齒輪嚙合使得洗車裝置水平旋轉,為車身清潔,由距離傳感器感應距離發出輸入信號至擴展板2的輸入端,判斷車輛的存在。

圖6 自動清潔裝置
2 智能化分選識別車位
智能化立體旋轉停車庫須完成一系列復雜動作:尋找車位——沿軌跡行走——遇到邊界停止——回避邊界——識別車位——清潔車身——繼續沿軌跡行走等。其車庫模式識別控制模型如圖7所示。智能立體旋轉停車庫設計中,產品具有競爭力的關鍵是控制動態車位的運動軌跡。程序流程是根據使用者發出的指令或事先植入的程序來動作,是該機器的主功能[7-8]。主功能的實現就是關于車庫在空間的點、線、面軌跡控制問題。多個觸點開關信號(按鈕)、距離傳感器信號連接I/O擴展板1/擴展板2的輸入端口,警示燈信號和紅綠燈顏色信號連接I/O擴展板1/擴展板2的輸出端口,與“ROBO控制器”耦合,USB串口輸出信號至計算機COM1/2,編寫相應ROBOPro圖形化程序,進行模式識別,優化最小路徑,定時控制車庫到達指定位置,滿足精度要求。

圖7 智能化車庫慧魚模型控制
六個車位的1~6個觸點開關信號L1、L2、L3、L4、L5、L6按數字量輸入ROBO控制器的輸入端口,識別車位控制部分主要使用了觸點開關的限位作用,通過延時等待,判斷數據并比較;距離傳感器的感應發出反饋信號;而ROBO控制器接口板的輸出端口分別連接M1~M4電機(執行器),這四路電機輸出可以改變轉速方向和進行8級調速。當操作與車庫對應的觸點開關按鈕,電機M1驅動行星輪系,則車庫所處的環境在每一個階段由蝸輪蝸桿——行星輪系(M1驅動)、伸縮機構(M2驅動)、清潔裝置(M3驅動)、氣動門(M4驅動)等自動調整,ROBO控制器核心元件按軟件指令傳輸信號實現識別和定時控制,主程序、子程序見圖8,經過計算機編程控制后,實現機器主功能。
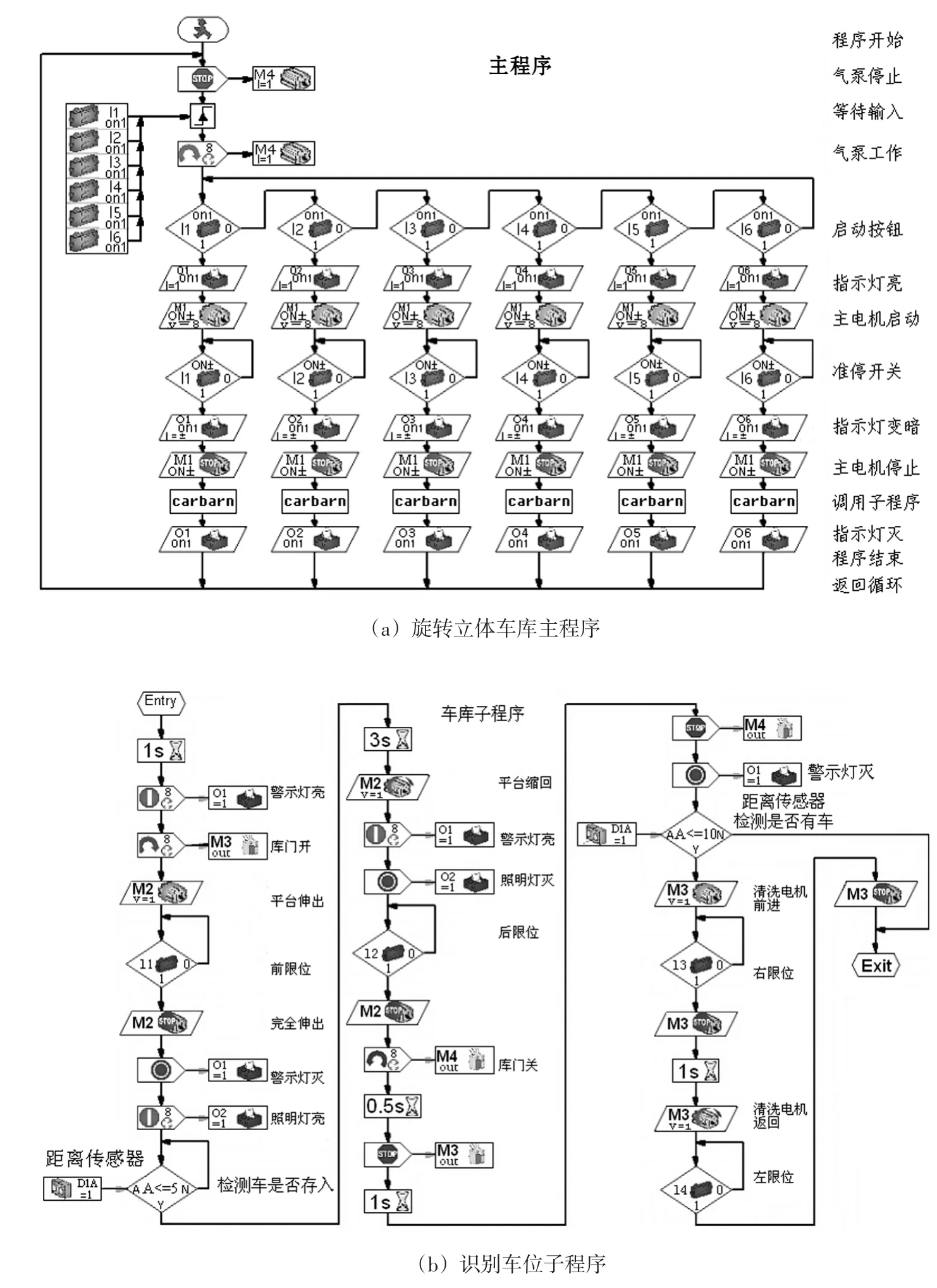
圖8 智能車庫硬件和軟件ROBOPro程序
3 結論
(1)智能化立體旋轉停車庫,充分利用了創新智能,用ROBOPro圖形化編程,控制車庫完成尋找車庫——沿軌跡行走——遇到邊界停止——回避邊界——識別車位——清潔車身——繼續沿軌跡行走等功能。
(2)車庫伸縮機構的伸縮平板下安裝有定軸輪系、螺旋絲杠和電子觸點開關,軟件指令控制電磁閥開關和電機M2的正反轉,設計控制解矩陣是完全解耦的,方便計算機集成控制,為實現識別車庫位置和提高精度提供了保證。
(3)立體旋轉停車庫中行星輪系及鏈傳動復合裝置的無相對滑動和對稱式結構設計,使得它在車輛比較多的時候仍然能夠實現自身的靜平衡狀態。
[1]申永勝.機械原理教程[M].北京:清華大學出版社,2003.
[2]蒯蘇蘇,馬履中.TRIZ理論機械創新設計工程訓練教程[M].北京:北京大學出版社,2011.
[3]蒯蘇蘇.港口鶴式起重機的創新設計[J].機械傳動 , 2012, 36 (5):56-70.
[4]濮良貴,紀名剛.機械設計:第八版[M].北京:高等教育出版社,2006.
[5]漆向軍,劉武,劉明丹,等.基于慧魚模型對焊接機器人無碰撞軌跡規劃的研究[J].機械科學與技術 , 2007, 26 (11):1442-1446.
[6]曲凌.慧魚創意機器人設計與實踐教程[M].上海:上海交通大學出版社,2010.
[7]曹國忠,郭海霞,檀潤華,等.面向功能創新的功能進化、組合與失效研究[J].機械工程學報,2012,48(11):29-38.
[8]楊清亮.發明是這樣誕生的:TRIZ理論全接觸[M].北京:機械工業出版社,2006.
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中國科技論壇(2017年7期)2017-07-25 08:49:53
Coco薇(2017年5期)2017-06-05 08:53:16
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55