離散三維激光點云的點陣化輸出方法研究
2013-08-20 12:35:00李忠富
山西建筑 2013年22期
李忠富
(安徽省交通勘察設計院有限公司,安徽合肥 230009)
三維激光掃描技術是一種新近發展起來的獲取空間三維信息的全新掃描技術,又稱實景復制技術。三維激光掃描技術與其他信息獲取方法互相結合和補充,為諸多領域開辟了新的發展空間和思路,推動了原有應用領域的不斷進步,同時也帶來了新的挑戰。近年來,三維激光掃描技術在文物保護方面、三維模型的重建工作以及工程施工過程中的質量監測和控制等領域得到了較多的應用,取得了一定的進展,給傳統的測繪領域帶來了新的機遇和挑戰。三維激光掃描技術被譽為是繼GPS技術以來測繪領域的又一次技術革新。本文分析了三維激光掃描的基本原理,探討了基于離散云的三維重建和點云數據的點陣化處理方法,并通過實例分析和證實了其有效性。
1 三維激光掃描基本原理
三維激光掃描儀是一種通過激光測距原理,瞬時測得物體的空間三維坐標值的測量儀器,主要由激光掃描系統及其附帶的CCD數字攝影系統、配套的軟件和內部校正系統所構成。目前,地面三維激光掃描儀通常采用TOF脈沖測距法,這是一種高速激光測時、測距方法,三維激光點P(XP,YP,ZP)坐標計算方法如式(1)所示。三維激光掃描測量儀器的工作原理及其內部坐標系,如圖1,圖2所示。

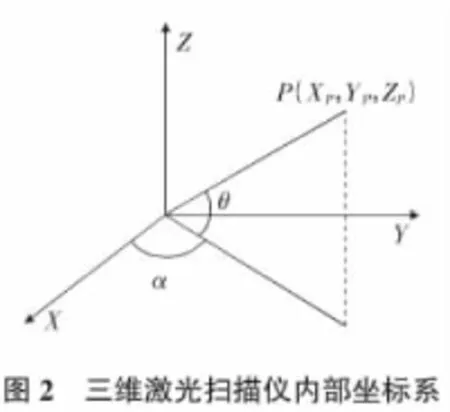

其中,S為測距觀測值;α為每個激光脈沖橫向掃描角度觀測值;θ為縱向掃描角度觀測值。
2 基于離散點云的三維重建
基于三維離散點云的三維重建流程具體包括數據預處理、離散點云的三角化(構建三角網格模型)以及三角網格的渲染三個部分。
2.1 數據預處理
首先,必須進行數據預處理,這是三維重建技術的基礎。三維掃描過程中,不僅外界環境因素對掃描實體存在阻擋和遮掩等影響,掃描實體本身亦可能存在不均勻的反射特性,這些均會影響最終掃描結果。因此,需要選擇合適的過濾算法來對點云進行過濾,剔除其中含有的不穩定點與錯誤點。
2.2 離散點云的三角化
通常得到的三維數據一般都是離散、復雜的三維點云,因此直接顯示在屏幕上,無法得到重建物體的表面。因此需要對點云進行三角化,重建結果為一張與原物體表面拓撲等價的三角形網格。
2.3 三角網格的渲染
經過前述兩個過程的處理,可以得到真實物體的三角網格圖形。一般的,三角網格基本能正確反映離散點間的拓撲關系。為了真實再現物體的表面,還需對模仿真實場景進行光照處理,將顏色信息和材質信息等賦予三角化網格的各個頂點,從而繪制出具有真實色彩的三維模型。
3 點云數據的點陣化處理
地面三維激光掃描獲得的數據是目標物體的三維點云,這與傳統攝影測量和遙感處理的數字圖像是不同的。離散的點云數據并不能夠真實準確地表達建筑物的整體模型,點云中點的組織是無固定順序的,即調換兩個點的存放次序,點云曲面不會改變。為了滿足建筑物三維建模的需求,首先要對所獲得的原始無序點云數據進行處理,建立起點云之間的拓撲關系。因此點云數據的表達和空間拓撲結構將直接影響著數據處理算法的可行性和效率。
3.1 點云數據的組織形式
三維激光掃描儀掃描文件是非公開格式,無法直接讀取操作,只能通過配套軟件導出ASC格式。ASC文件由掃描點的三維坐標、激光反射強度和顏色信息構成,點的表現形式為(X,Y,Z,I,R,G,B)。
*.PTX文件與ASC文件相同的是文件中包含三維坐標、激光反射強度和顏色信息。不同的是點云數據按照本身的空間排列次序排放,點云之間拓撲關系比較明確,包含數據的點的行數和列數、配準參數(旋轉矩陣、平移向量以及全局變換矩陣)等,同時文件中也以(0,0,0)的形式保存了一些掃描廢點信息,文件如圖3所示。
因此,將原始點云的ASC格式轉換成PTX格式,對于后續的數據配準和建模有著直接的意義。
3.2 點云數據的點陣化輸出
從測站觀察時,目標點云客觀上呈點陣狀,當用掃描儀內部坐標系表示空間點位置時,點云中表示水平和垂直的角度為順序增加或減小,且與點序關系相符。因此,只要將點云按行列號(i,j)輸出,即可完成點云的點陣化處理。

根據三維激光掃描的基本原理,可以將三維激光點云映射到由橫向掃描角α、縱向掃描角θ構成的坐標系中(α∈(0,2π),θ∈( -π/2,π/2)),如式(2)所示。

將三維激光點云沿α,θ軸以Δα,Δθ等角展開,如式(3)所示,生成M行N列的二維矩陣,之后按式(4)確立三維點云所在的行列號:

其中,M為點云的總行數;N為點云的總列數;i為掃描點在矩陣中的行號;j為掃描點在矩陣中的列號。
三維激光掃描儀掃描文件一般為ASC文件,該文件中并無掃描時橫向與縱向掃描角度間距Δα,Δθ。因此如何計算測站掃描時橫向與縱向掃描角度間距是求得掃描時點云所在行列號的關鍵,此間距類似于采樣間距。
設橫向掃描間距與縱向掃描間距比為:
ΔH∶ΔV=a∶b(ΔH,ΔV分別為橫向與縱向掃描間距) (5)每個點占面積為 Δα ×Δθ,總面積依舊為(αmax- αmin)(θmaxθmin),則:

又根據比例關系:

由此可得:

因此,將式(8)代入式(3)和式(4)中,即可求得各掃描點的行列號。通過以上的點云數據處理方法就可以精確地描述其散亂點云的拓撲關系。
4 實驗與分析
使用Trimble GX掃描儀對某實驗室的墻角分別進行了掃描,墻角的橫向掃描間距10mm和縱向掃描間距為20mm,掃描距離為4.809m,掃描時間為60s,共3089個點,初始點云數據用軟件PointScape打開,如圖4所示。利用VC++平臺將實驗數據進行點陣化處理,并輸出成PTX格式文件,最后通過專業三維建模軟件建立三角網格,如圖5所示。


從圖5中可以看出三角網格的總體效果比較好,直觀的反映出點云在空間位置上的變化。而個別掃描點缺失造成的原因可能是掃描儀自身的誤差、該掃描點的反射率低、算法的舍入誤差等,實驗表明該算法對不等分辨率的三維點云的點陣化是有效的。
5 結語
地面三維激光掃描技術具有獲取數據速度快、自動化程度高、操作簡單、作業時間短等優點,在工程中不斷得到應用。本文總結分析了三維激光掃描技術的工作原理,提出了散亂點云數據的點陣化算法,通過將三維點云進行二維化處理,并按點云的行列號輸出,比較有效地建立起點云之間的拓撲關系,進而生成三維網格模型,并通過實驗進行了驗證,為后續的點云配準與三維建模工作奠定了基礎。
[1]李清泉,楊必勝,史文中,等.三維空間數據的實時獲取、建模與可視化[M].武漢:武漢大學出版社,2003.
[2]馬立廣.地面三維激光掃描測量技術研究[D].武漢:武漢大學,2005.
[3]張 毅.地面三維激光掃描點云數據處理方法研究[D].武漢:武漢大學,2008.
[4]潘建剛.基于激光掃描數據的三維重建關鍵技術研究[D].北京:首都師范大學,2005.
[5]王瀟瀟.地面三維激光掃描建模及其在建筑物測繪中的應用[D].長沙:中南大學,2010.
