雷達測量技術在低介電常數料位測量中的應用
2013-08-31 02:45:12王進朱洪平張偉
石油化工自動化 2013年6期
王進,朱洪平,張偉
(1.寧波萬華聚氨酯股份有限公司,浙江 寧波315812;2.上海恩德斯豪斯自動化設備有限公司,上海200241)
整套雷達系統包括帶天線的發射器、微波傳送通道、微波反射面、帶天線的接收器。在物位測量中,通常發射和接收天線是相同的。
超聲波頻率大約在40~70kHz,屬于機械波。而微波頻率在GHz數量級上,屬于電磁波。超聲波的反射機理是密度差,而微波的反射機理是波阻的變化。反射度R是反射能量與發射能量之間的比值,其負對數的10倍稱為反射信號強度,R與介質的介電常數εr的關系如式(1)所示:
由式(1)可知,εr越高則R越高。表1給出了R與εr的關系。如果反射面有波動,則反射度將相應降低。
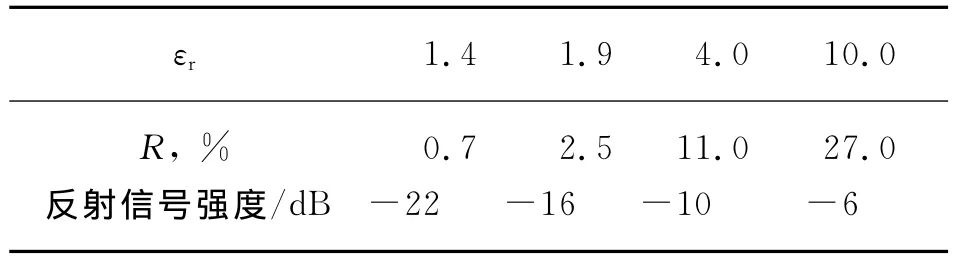
表1 εr與R反射信號強度的關系
微波測量的優點是它不需要任何傳送介質,在各種介質中的傳送速率c可以通過式(2)算出:

式中:c0——真空中的光速,微波在各種氣體介質中的c與c0幾乎一樣,而且受壓力或者溫度變化的影響很小。微波在空氣中測量誤差與壓力、溫度的關系如圖1,圖2所示。
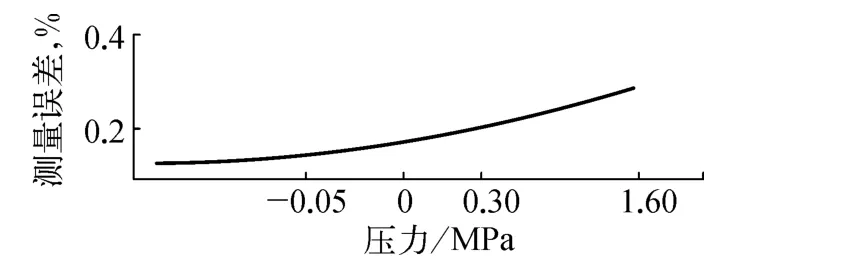
圖1 測量誤差與壓力關系(20℃空氣)
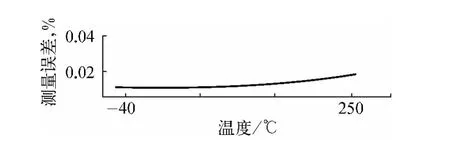
圖2 測量誤差與溫度關系(0.1MPa空氣)
1 雷達測距技術
雷達測距是根據飛行時間TOF(Time of Flight)原理,整個TOF測量過程分5個步驟:發射微波脈沖;脈沖在被測介質表面反射;接收反射回來的脈沖;計算傳感器與反射面之間的距離D=ct/2;再計算物位L=E-D。
目前利用微波進行物位測量,主要使用兩種技術:調頻連續波FMCW(Frequency Modulated Continuous Wave)方法;脈沖方法,這兩種方法都可以在量程范圍內保證mm級的精度要求。
1.1 FMCW方法
該方法使用線性調頻的射頻(RF)信號,如發射器發出的頻率在9.5~10.5GHz周期性地變化。當介質表面反射回來的信號到達接收器時,發射器中的發射頻率也同時發生了變化。微波運行的時間可以通過計算接收到的信號頻率與當前發射頻率之間的差值來獲得。把發射頻率與接收頻率進行混頻處理后,將形成一個中頻段的信號,該中頻信號頻率正好與被測距離呈正比。
1.2 脈沖方法
該脈沖指的是一組有許多微波組成的“微波包裹”。脈沖持續時間約為0.8ns,脈沖的重復頻率為3.6MHz。脈沖的運行時間t是相當短的,如果要達到1mm的物位測量分辨率,則需測量時間為6ps,測量如此短的一個時間在技術上是相當困難的。
6GHz的微波以脈沖的形式發出,發射脈沖的重復頻率為3.6MHz。反射回來的回波脈沖隨后將與一個參考脈沖進入頻率混合器進行信號處理。該參考脈沖與發射脈沖形狀相同,但其重復頻率比3.6MHz小43.7Hz。如圖3所示,頻率混合器把回波脈沖與參考脈沖相乘,經過混頻處理后形成中頻脈沖,與發射脈沖形狀完全相同,其頻率變為中頻43.7Hz(周期為23ms),即經過混合處理器處理后的中頻脈沖把回波脈沖在時間軸上擴展了8.238×104倍。只要測出中頻脈沖上發射脈沖與回波脈沖的時間間隔t1(ms),則t=t1/82 380,即實現了極短脈沖運行時間t的測量。
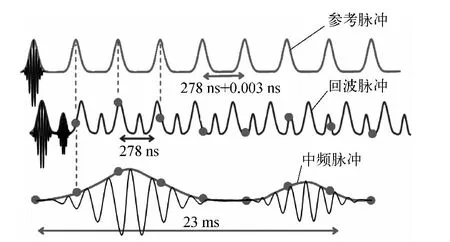
圖3 混頻處理后的中頻脈沖
2 雷達儀表
2.1 非接觸式雷達
對特定工況條件下(壓力、溫度)的液體和揮發性的(也包括腐蝕性的)介質進行測量時,非接觸雷達測量是最合適的測量方法。非接觸雷達測量原理的進一步研發使得該技術也可以用于對散裝物料的測量,而且不受散裝物料中灰塵和充填時粉塵的影響。不同非接觸式雷達產品的主要區別是天線種類不同,主要有喇叭天線和桿式天線兩種。雷達儀表的天線主要起到三個作用:阻抗匹配,“光圈”作用,匯聚作用(Focusing)。
2.1.1 阻抗匹配
對于微波反射來說,在每個阻抗變化的地方都會產生部分微波能量的反射。為了發射出盡可能多的能量,射頻(RF)各個組成部件的阻抗都應該互相匹配,包括高頻模塊與高頻模塊電纜的阻抗匹配,天線與微波傳送介質的阻抗匹配等。高頻模塊電纜的阻抗為50Ω,真空的阻抗為377Ω(對應εr=1)。喇叭天線也具有一定的阻抗,而且該阻抗與天線尺寸有關。天線的εr越接近于1,則可以發射出越多的能量。DN80喇叭天線的εr≈1.17,而DN150喇叭天線的εr≈1.04,與真空更接近,能夠發射出更多的能量。
2.1.2 “光圈”作用
天線的喇叭越大,則“光圈”越大,天線所能接收到的來自被測介質表面的反射信號越強。
2.1.3 匯聚作用
正如光線會在微小圓孔處發生衍射現象,微波也會在喇叭處發生衍射現象,而且衍射角度隨著天線尺寸的減小而增大,即對大尺寸天線來說,衍射效果弱,微波匯聚效果則更好,波束角則更窄。
桿式天線的桿子形狀是圓錐形的,其微波的能量分布與DN100的喇叭天線能量分布情況相似。桿式天線的優點是其材料為PTFE,適用于強烈化學腐蝕的場合。
2.2 導波雷達
導波雷達是指微波沿著一根導波纜或者導波桿傳送,接觸到被測界面后沿著導波纜或導波桿反射回來。利用導波雷達物位測量儀表既可對散裝物料(纜式探頭)也可對液體(桿式和同軸探頭)進行測量。有了可靠的微波導向,即使是湍流液體表面或者有泡沫的液體表面也不會影響測量精度。
導波雷達的優點是其不受被測容器內部溫度、壓力、密度變化的影響,而且粉塵、泡沫、湍流液面對其影響也很小。缺點是導波纜上的掛料尤其是不規則的掛料將削弱微波強度,改變微波傳送速度或者產生虛假的回波信號,這些因素都將導致錯誤的物位信號。因此,如果采用纜式導波雷達測量粉料物位,要防止料倉受潮,避免粉料受潮后在導波纜上掛料。
3 PIus Master eXact應用軟件
E+H公司的雷達儀表在數據處理方面采用先進的Plus Master eXact應用軟件。非接觸式雷達的“首次回波因子”FEF(First Echo Factor)功能,避免了儀表把多次反射回波誤認為物位信號;導波雷達的底部回波EOP(End of Probe)算法使儀表可以在回波信號很弱無法被探測到的情況下,仍然可以通過EOP信號算出物位信號,不失波。
3.1 首次回波因子
非接觸式雷達應用于某些幾何尺寸罐體時,很可能出現多次反射的回波信號,其信噪比大于真實物位的回波。“首次回波因子”功能避免了儀表把多次反射回波誤認為物位信號。
“首次回波因子”定義了最大回波向下的一個帶寬(band),算法將搜索在該帶寬范圍內的第一個峰值,并認定該峰值回波為被測物位反射回來的信號。圖4為一例回波曲線,該曲線上有2個回波且第2個回波要比第1個回波幅值大。由于第1個回波在帶寬以內,儀表認定其為物位信號;第2個回波是由于多次反射引起的。
“首次回波因子”又分為“動態首次回波因子”和“靜態首次回波因子”。“動態首次回波因子”是指“首次回波因子”的大小與最大回波的幅值有關。最大回波幅值越小,則帶寬越小,首次回波搜索范圍越小,如圖5a)所示;最大回波的幅值越大,則帶寬越大,首次回波搜索范圍越大,如圖5b)所示。動態回波因子的優點是防止回波信號過小時,干擾信號進入到帶寬中;同時保證回波信號較大時,能夠找到有效的首次回波。“靜態首次回波因子”是指帶寬一定,即“首次回波因子”為常數。
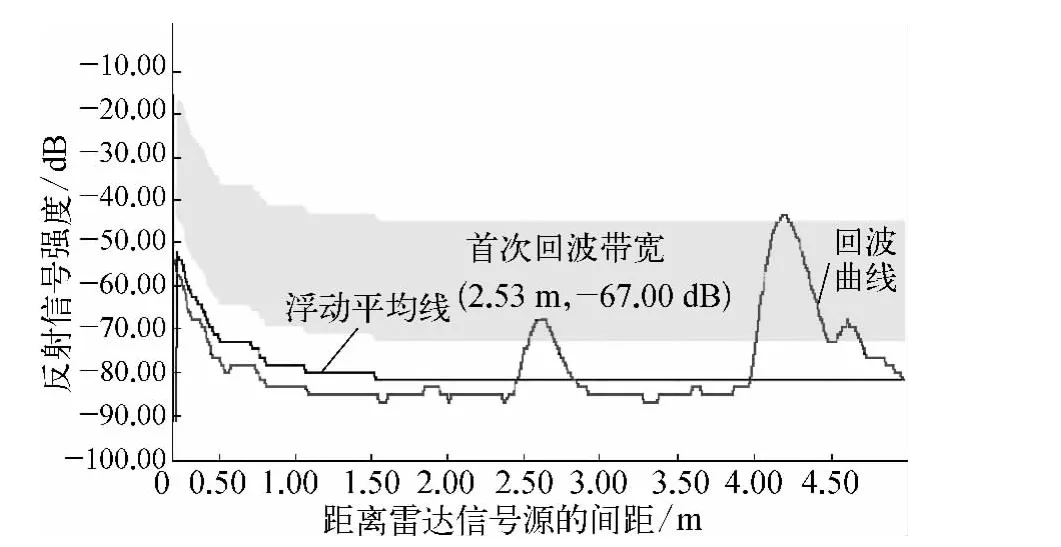
圖4 “首次回波因子”的定義
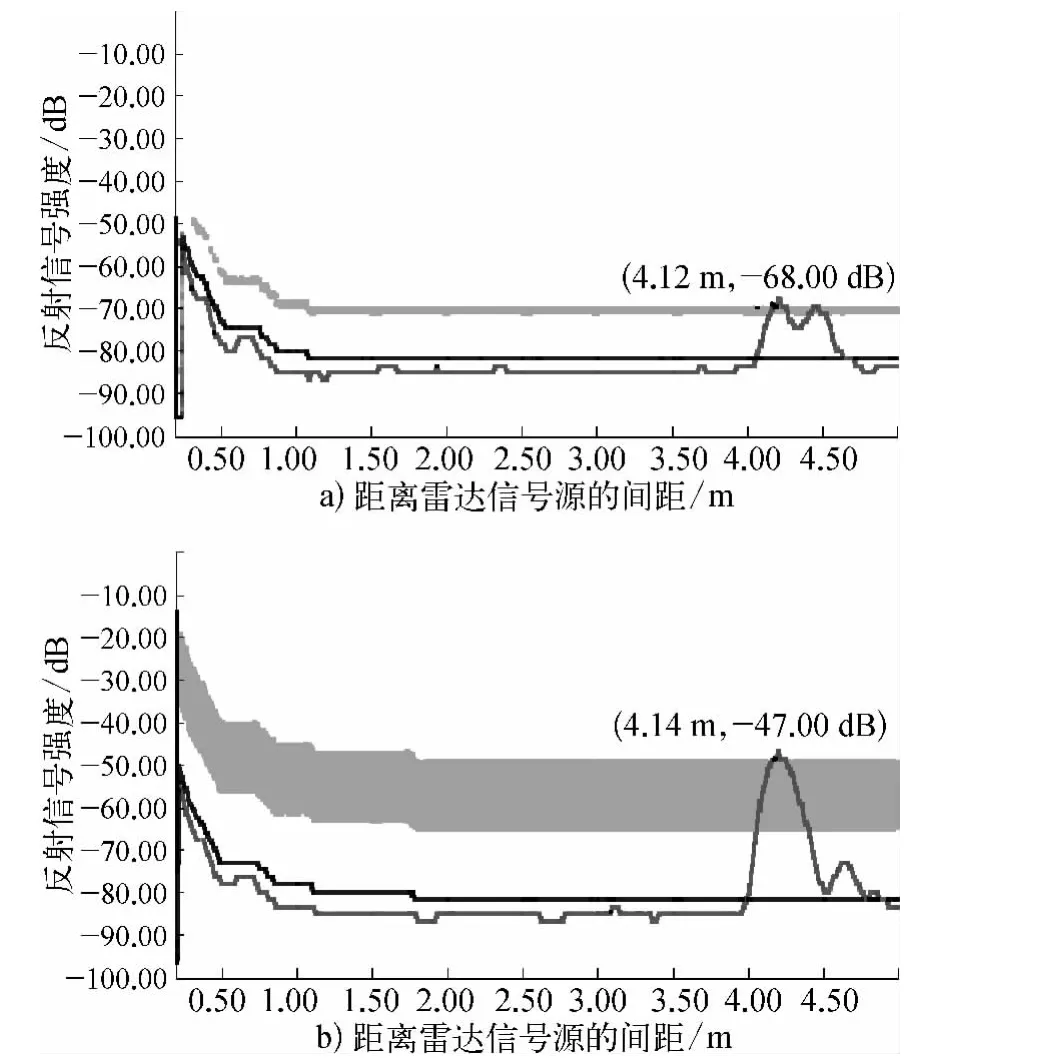
圖5 “動態首次回波因子”的工作原理
3.2 EOP算法
對于導波雷達來說,當被測介質液位很低時(尤其是低介電常數的介質),回波信號很弱無法被探測到,但采用EOP算法后,儀表仍然可以通過EOP信號計算出物位。
儀表檢測到導波纜末端EOP信號,根據TOF原理計算出纜長(纜長L=空氣中微波速度c0t/2)。該纜長與真實纜長之間有一定的差值,用底部回波偏移Lshift表示。
造成差值的原因是微波在空氣中的傳播速度與在液體介質中的傳播速度不同,而EOP信號是微波經過空氣—被測介質—空氣后,反射回天線的。空氣中用微波速度c0計算纜長,將導致所測纜長大于真實纜長,產生差值。
Lshift與(L)的關系如式(3)所示。

式中:Lslope——底部回波偏移率;ε——被測介質的介電常數。
如果同時檢測到物位信號與EOP信號,則根據檢測到的Lshift與L計算出Lslope,而且該過程是自動重復進行的。如果失波,則儀表將根據當時檢測到的Lshift和上次計算出來得Lslope,通過式(3)計算出物位。
4 導波雷達EOP算法的典型應用
某不銹鋼材質的圓柱形立罐,罐直徑3m,高度約10m,導波雷達安裝于罐頂,測量介質為PVC塑料粒子;在導波雷達料位計安裝后,加料口離導波雷達水平距離為40~50mm,加料過程中PVC塑料粒子可能會被吹到纜繩上。
當向罐中加入PVC料時,儀表會顯示錯誤的高料位,如98%;當停止加料時,儀表會在不同的料位之間跳變。原因是在持續加料的過程中,PVC塑料粒子會不斷地碰撞纜繩,產生干擾信號,故產生料位跳變到98%的虛假信號,而一般罐一旦投入使用都很難進行整改或改造;當不加料時,由于PVC塑料粒子的介電常數很低,DC值在1.6左右,使得微波在PVC塑料粒子上的回波信號很弱,常會引起測量值的跳變。回波信號如圖6所示,從回波曲線可以看出,料位回波信號26mV,遠低于底部回波信號100mV。
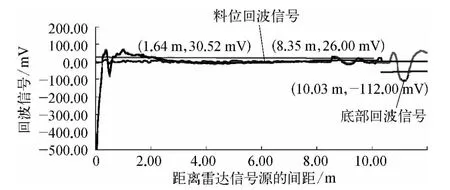
圖6 現場回波信號
由于底部的回波信號很好,超過了100mV,而且會隨著料位的增加按比例的往后遷移,故可以先屏蔽不穩定的料位回波信號,再利用EOP反推算法計算料位。
輸入準確的被測量介質的介電常數和纜繩長度,可以通過提高門檻電壓值來屏蔽不穩定的料位回波信號以及進料時的干擾信號,回波曲線如圖7所示,即抬高了圖7中的門檻線高度。儀表會根據偏移距離、介電常數計算出PVC塑料粒子的料位。
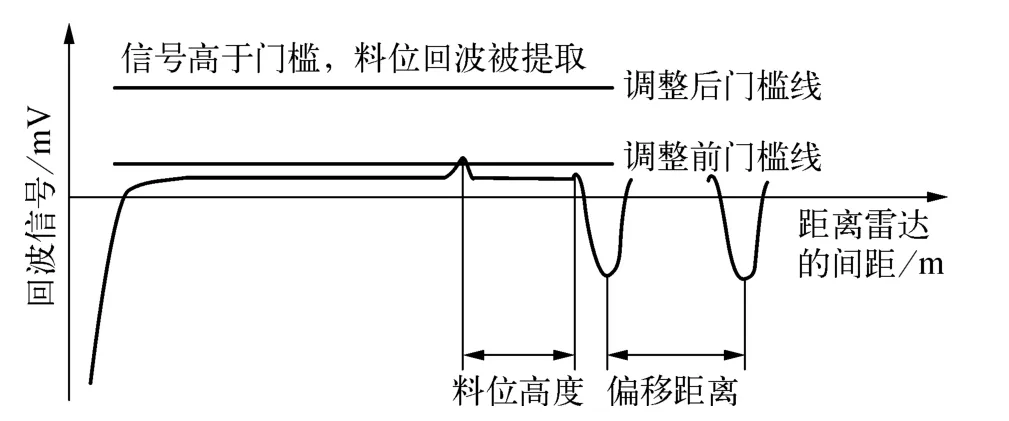
圖7 EOP僅推算法示意
5 結束語
微波測量技術解決了很多以前無法解決的應用問題,其應用場合正在不斷擴大。當然,微波測量技術并不是萬能的,例如在測量泡沫很多的介質時往往選用差壓變送器。
[1]艾俊軼.毫米波高精度測距雷達信號處理及實現[D].成都:電子科技大學,2006.
[2]陸石輝,邱瑞鑫,黃少先.淺談雷達液位計及其構成的液位測量系統[J].中國水能及電氣化,2007(10):48-51.
[3]霍玉晶,陳千頌,潘志文.脈沖激光雷達的時間間隔測量綜述[J].激光與紅外,2001(03):8-11.
[4]張金,王伯雄,崔園園,等.高精度回波飛行時間測量方法及實現[J].兵工學報,2011(08):60-64.
[5]崔景霖,榮剛,馬明,等.基于時間數字轉換技術的超短時間間隔測量[J].探測與控制學報,2009(04):67.
[6]徐家迅.一種改善脈沖雷達檢測性能的方法[J].硅谷,2012(05):229-231.
[7]廖華橋.LFMCW液位測量雷達系統及信號處理研究[D].成都:電子科技大學,2006.
[8]齊國清.FMCW液位測量雷達系統設計及高精度測距原理研究[D].大連:大連海事大學,2001.
[9]陳祝明,丁義元,向敬成.提高線性調頻連續波雷達測距精度的最大值估值算法[J].系統工程與電子技術,1999(06):40-43,62.
[10]陳先中,柳瑾.FMCW微波液位測量的快速頻率估計算法[J].傳感技術學報,2005(04):221-225.
[11]張同舟.高頻雷達目標檢測方法研究[D].西安:西安電子科技大學,2011.
[12]王春麟.提高超聲回波檢測測距精度的方法[J].電測與儀表,1995(12):5,24-29.
[13]葉旭,魏萌,徐科軍,等.導波式雷達物位計回波信號處理方法研究[J].化工自動化及儀表,2012,39(10):1282-1284,1308.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00