基于TMS320C6747的SVPWM實現方法研究
2013-09-01 02:15:20周梅輝吳章標余勇波
電氣技術 2013年9期
周梅輝 吳章標 蔣 順 余勇波 繆 峰
(中國人民解放軍95275部隊,廣西 柳州 545005)
伴隨著電力電子技術的迅猛發展,脈寬調制(PWM)技術在其中發揮了越來越重要的作用。特別在工業逆變電源中,空間矢量脈寬調制(SVPWM)方法已經成為應用最廣泛的一種逆變控制技術。SVPWM方法具有電壓諧波小,直流電壓利用率高,精度高等等優點,數字化控制實現簡單等優點。
TMS320C6747低功耗數字信號處理器,其主頻可達300MHz,每秒可執行2400百萬條定點指令或者1800百萬條浮點運算指令,其浮點運算單元能顯著提高控制精度和運算速度,采用1.2V的核電壓、3.3V的I/O電壓,適用于工業控制,同時芯片自帶了3路增強型PWM輸出,對電力電子控制提供了良好的支持。
本文在研究了SVPWM原理的基礎上,結合數字信號處理器 TMS320C6747的特點,對該數字控制器芯片為核心的電源逆變硬件設計進行了研究,并編寫了相關的軟件程序。
1 空間矢量脈沖調制基本原理
空間矢量脈沖調制方法的基本原理是,利用逆變器的功率開關器件之間的不同的開關組合,從而合成有效電壓矢量來逼近基準圓。
如圖 1所示,T1,T2,T3,T4,T5,T6為功率開關器件,其中 T1與 T2,T3與 T4,T5與 T6各成一組,同一時刻的同一組只有一個導通。Va,Vb,Vc為輸出相電壓,通過對 T1—T6功率開關的控制,輸出不同組合的相電壓,產生相應的電壓空間矢量。
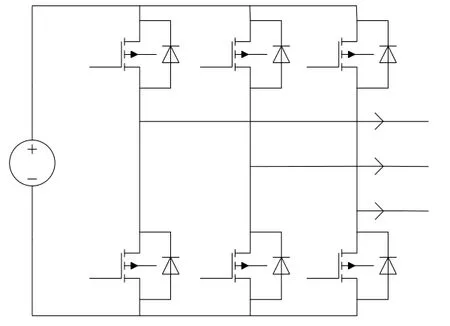
圖1 三相逆變主電路
針對圖1所示逆變電路,假設功率開關導通的狀態為1,斷開的狀態為0,那么圖1中逆變系統的工作狀態有8種,T1、T3、T5的通斷組合為有8種:000,001,010,011,100,101,110,111。其中000和111狀態為無效狀態,其他6種狀態為有效狀態。其形成的基本電壓空間矢量圖如圖2所示。
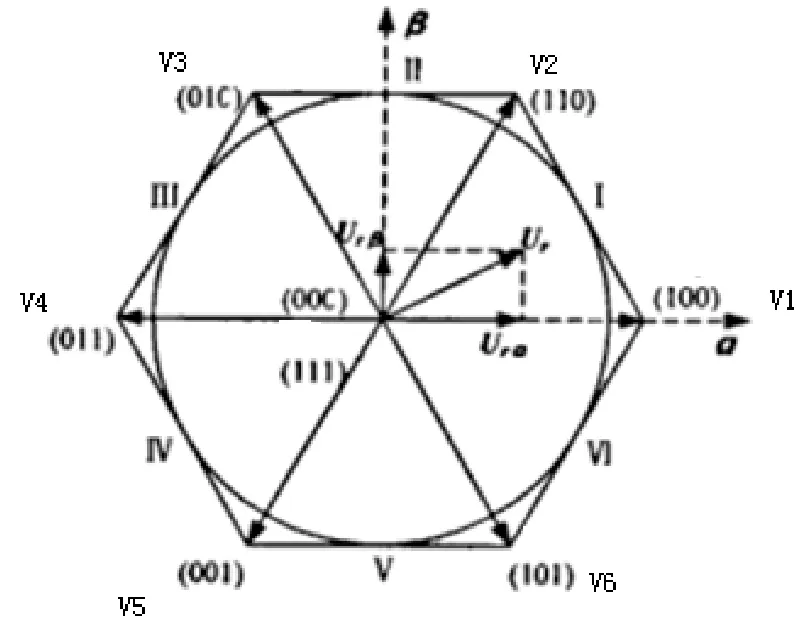
圖2 基本電壓空間矢量圖
通過對開關時刻的控制,從而實現電壓輸出的控制。這是SVPWM的基本原理和實現的有效途徑。
2 硬件系統總體結構
基于SVPWM的逆變系統硬件實現中存在以下幾個難點。
1)控制系統硬件多,結構相對復雜。這是一個弱電控制強電的過程,為了保證控制精度、控制速度和系統可靠性,不僅對控制芯片提出了更高的要求,而且對電路的設計提出了嚴格的要求。
2)為了保證該系統的可擴展性和實用性,系統加入了位置環,速度環和電流環的相應接口。從而能方便實現逆變、電機閉環控制等等相應的功能。這需要添加大量的外設,所以在硬件設計中要綜合考慮和設計,不僅要保證硬件設計的正確性和穩定性,還要充分考慮系統的需求。
針對以上實際情況,在硬件和軟件設計中需要充分考慮各方面因素,硬件上選用精度高,速度快的芯片作為控制核心,軟件上使用優化的代碼,合理設計程序結構。
2.1 控制芯片特點
設計了以 TMS320C6747為核心的控制器,TMS320C6747是TI公司低功耗浮點型工業控制芯片,相對其他一些芯片而言,它具有多方面的優勢,可以達到要求的控制精度。
1)它的運行速度為300MHz,采用兩級緩沖存儲器結構,相對而言,它的存儲空間都有了很大的增加,整體性得到大幅度提升,非常適合需要大量計算的工業控制系統,方便實現復雜的控制算法。SVPWM 的實現過程中有大量的運算,通過使用該款DSP芯片可縮短計算時間,加快系統的響應速度。
2)優良的內部浮點架構,大大簡化了編程,縮短了程序代碼長度和執行時間。傳統的定點型DSP只能表示整數,對數據小數位的表示需要采用別的方式,編程復雜并且易出錯。同時復雜的程序運行增加了程序執行的時間,占用了存儲器的空間,使系統的控制精度降低。浮點運算有效解決了這一個問題,減少了針對數據運算的編程工作,簡化了程序。
3)有3路高精度PWM輸出,能靈活進行相關配置死區時間、觸發方式以及占空比等方面信息。傳統的PWM輸出是通過粗糙步長,而HRPWM輸出則是通過微觀邊緣定位(MEP)方式,MEP邏輯將傳統 PWM產生單元的粗糙系統時鐘配置為更加細小的單元,HRPWM能通過MEP方式輸出更高的控制精度。
2.2 相關外設
電流傳感器。矢量控制需要三相電流,根據控制要求和實際情況,選用了LEM公司生產的電流傳感器,測量范圍為:0~100A,將輸出經過運放電路后調理成0~10V接入AD采樣芯片后傳送給DSP芯片。
2.3 功率模塊
主電源通過直流電源供電,通過DSP對智能功率模塊(IPM)進行控制,將直流電壓轉成三相三相交流電壓輸出,其中 IPM 選用了富士公司的6MBP20RTA060智能功率模塊,該 IPM 耐壓可達600V,最大通過電流為20A,基本滿足系統要求,同時該IPM集成了相關驅動電路,設計有過電壓,過電流,過熱等檢測電路,能為系統提供相關的保護。使用時只要在PWM信號和IPM控制端口之間加入簡單的光電隔離電路。加入智能功率模塊后整個電路設計更加簡潔,實現變得簡單,系統整體的可靠性和安全性也得到了提升。
2.4 軟件設計
軟件分為兩個模塊:系統主程序模塊和中斷服務程序。主程序模塊的主要用來對系統的外設硬件進行初始化。SVPWM 中斷服務程序采用定時器中斷,依據設定的頻率來產生相應的 PWM波輸出,該中斷服務程序具有良好的可擴展性。系統軟件流程圖如圖3所示。
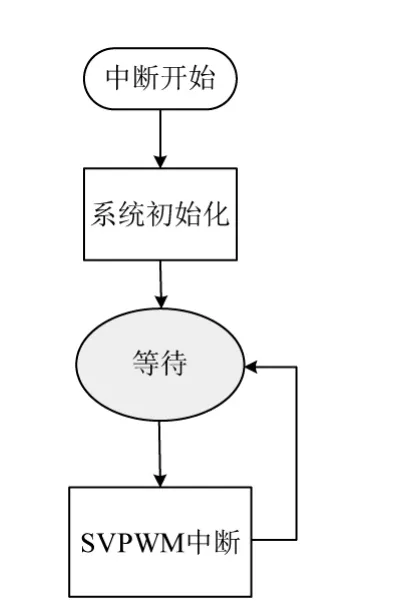
圖3 控制系統軟件流程圖
3 實驗結果
依據要求設計了基于 TMS320C6747的硬件結構,如圖4所示。
圖4 硬件設計圖
為了測試系統,在三相輸出加入了永磁同步電機作為負載進行測試。實驗用永磁同步電機采用了浙江某電機公司生產的永磁同步電機電機,額定功率為500W,允許供電范圍為38~380V,有兩個對極,允許轉速范圍為300~3000r/min。其具體參數如表1所示。
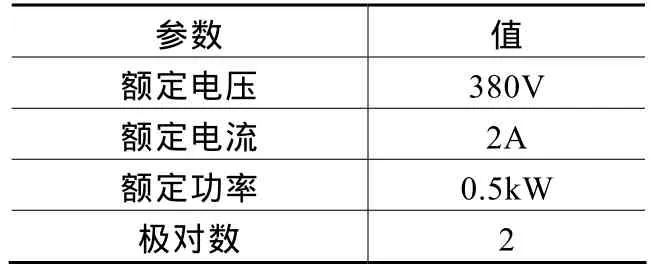
表1 永磁同步電機參數表
在使用設計的逆變系統對該永磁同步電機進行空間矢量脈沖調制的控制,在電機運行穩定的情況下,記錄了系統的A相電流輸出,如圖5所示。
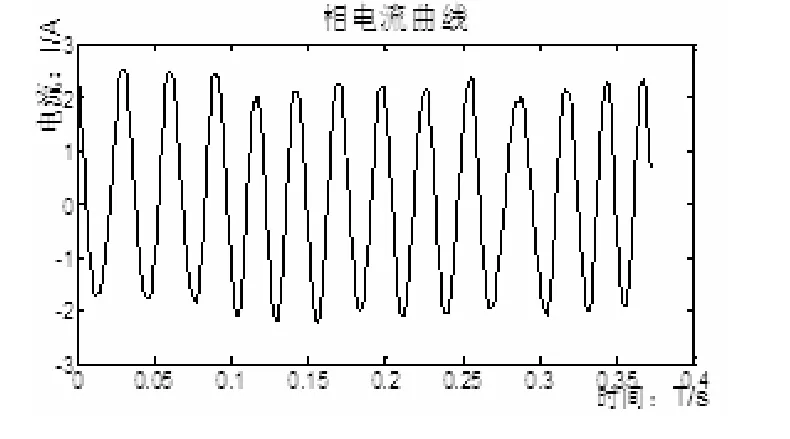
圖5 加入電機負載后A相電流
在永磁同步電機作為負載的穩定運行后,由上圖A相電流可以看出電流成正弦,有所波動,但是相對穩定在了±2A的這個范圍內,同時在固定頻率下電機運行穩定正常。
通過使用基于TMS320C6747的SVPWM的逆變模塊,永磁同步電機能實現它的穩定運行和輸出。說明該SVPWM實現方法的正確性和實用性。
4 結論
文章通過對SVPWM的研究,采用了DSP作為核心控制芯片,設計了相關電路的外設和相關控制算法,最后實驗驗證了該系統的正確性和實用性。
本文主要結論如下:
1)本文應用了 TI公司的工業控制芯片TMS320C6747作為核心設計了 SVPWM 輸出的逆變系統,具有良好的控制性能、實用性和可行性。
2)對整個系統進行了全數字化設計,實現方法簡單可行,具有可參考性。
[1] 陳伯時.電力拖動自動控制系統[M].3版.北京:機械工業出版社,2005.
[2] 韓安太,劉峙飛,黃海.DSP控制器原理及其在運動控制系統中的應用[M].北京:清華大學出版社,2003.
[3] 張珍敏,趙軍紅,等.基于SPWM和SVPWM的變頻電源仿真分析[J].通信電源技術,2009,26(4):4-7.
[4] 李華德.交流調速系統[M].北京:電子工業出版社,2003.
[5] 易龍強,戴瑜興.正弦逆變電源的數字脈寬調制技術[J].湖南大學學報,2007,34(1):37-42.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
