動車組制動系統故障對行車安全影響的分析
2013-09-04 01:46:50石先明
鐵道標準設計 2013年2期
石先明
(中鐵第四勘察設計院集團有限公司,武漢 430063)
毫無疑問,安全是鐵路永恒的主題,要確保行車安全,列車制動系統是基礎、是核心,必須選用高安全、高可靠、性能優異的制動系統設備。然而,任何設備都有可能故障,列車制動系統發生故障后,不同的故障會產生什么樣的后果?列車繼續運行是否有足夠的安全保障?其安全與速度之間存在什么樣的關系?這些問題至關重要。以CRH2型動車組為例,分析我國動車組列車制動系統自身的安全保障措施,并通過理論計算,深入分析動車組列車制動系統故障后對行車安全的影響程度。限于篇幅的原因,將另行專題研究動車組列車制動系統故障后的安全防護對策。
1 動車組制動系統構成及工作模式
1.1 動車組制動系統構成及其特點
我國目前運營的動車組有 CRH1、CRH2、CRH3、CRH5、CRH380等,構成 CRH系列,廣泛用于 200 km/h以上既有線提速區段和新建客運專線旅客運輸[1-3]。CRH系列動車組都采用電氣指令微機控制的電空復合制動,即空氣制動與動力制動復合形成列車的制動力。動力制動是一種電制動,在動車組上大都以再生制動的方式存在。
動力(再生)制動是常用制動優先使用的一種制動方式,列車制動時,優先使用再生制動,當其制動力不足時,由空氣制動來補充。當列車減慢到很低的速度時,動力制動能力減弱,甚至減到零。為了在低速階段仍能得到制動力,隨著速度的減少,逐步加入空氣制動,最后全部取代動力制動。
另外,CRH系列動車組采用動力分散方式,其制動系統也采用分散方式,分布在各個車輛上的制動子系統設備通過協同工作,使列車具有足夠的制動力,保護列車運行安全。
CRH2型動車組制動系統主要由制動控制系統、基礎制動裝置及空氣供給系統三大部分組成[4]。
1.1.1 制動控制系統
制動控制系統主要包括制動信號發生裝置、制動信號傳輸裝置和制動控制裝置。
制動信號發生裝置包括司機制動控制器和制動指令轉換裝置。司機制動控制器位于1、8號(16號)車駕駛室操縱控制臺上。另外各駕駛室內安裝1臺制動指令轉換裝置,在動車組救援時,將連掛機車的列車管空氣壓力變化信號轉換成電信號,實施列車制動。
制動信號傳輸裝置主要用于接收、傳輸制動指令及制動狀態信息。
制動控制裝置主要用于接收制動指令、實施制動力控制、防滑控制、故障診斷及信息傳輸等。其內部集成了制動控制器(BCU)、空氣閥類組件、風缸等設備。
制動控制裝置接收列車網絡以及指令線所發的常用制動或快速制動指令,根據車輛速度、空氣彈簧壓力等各項因素,算出必要的空氣制動力,輸出到電空轉換閥進行電空轉換,然后供給中繼閥,經中繼閥放大流量后,壓力空氣通過防滑閥到達制動缸。
制動控制裝置可以實時將監測到的制動信息(如總風壓力、制動缸壓力、空氣彈簧壓力等)通過列車網絡傳輸至車輛信息顯示器上。若車輪抱死、傳感器傳輸異常等故障發生時,故障信息會立即通過列車網絡傳輸至車輛信息顯示器上,報警并彈出故障信息。
1.1.2 基礎制動系統
CRH2型動車組的基礎制動裝置采用氣壓-油壓轉換的液壓夾鉗式盤型制動裝置,列車制動管的壓縮空氣需要經過增壓缸的轉換,之后向制動夾鉗的油缸輸出高壓油液,推動夾鉗活塞上的閘片夾緊制動盤形成制動力。
1.1.3 空氣供給系統
動車組空氣供給系統主要由主空氣壓縮機、輔助壓縮機、儲風缸、主風缸管路、空氣干燥劑、空氣過濾器及其相關的輔助設備等組成。
8輛編組的CRH2型動車組的風源系統有2套:一套是3臺主空氣壓縮機組成的主風源,分別位于3、5、7號車,主要為空氣制動系統供風,同時為氣動輔助設備(包括風笛、空氣簧、門控、集便器等)提供風源;另一套為3臺輔助空氣壓縮機,分別位于2、4、6號車,主要為受電弓升降弓裝置、真空斷路器提供風源。
CRH2型動車組的風缸采用冗余設計,即使其中一半的壓縮機不能工作,供風系統也能滿足各用風裝置的正常用風要求,整個制動系統仍能正常工作。
CRH2型動車組的供風系統由列車主控計算機監控,正常情況下,系統自動工作,壓縮機為管路與儲風缸加壓,通過壓力傳感器,監測氣壓達到設定值時,風缸停止工作。在列車運行過程中,如果壓力下降到某一值,主壓縮機開始啟動;如果壓力繼續下降第二壓縮機啟動;如果進一步下降,第三壓縮機啟動,當氣壓低于警戒值時,自動實施緊急制動,保障行車安全。
1.2 動車組制動模式
動車組運行時的制動工況最主要有2種:常用制動和緊急制動,各型動車組還有一些自身特色的其他制動功能,如CRH2型動車組還有快速制動、輔助制動等功能。常用制動是動車組常用的制動控制方式,用于正常的調速或停車。緊急制動用于緊急情況下的最大減速停車。
CRH2型動車組司機制動控制器設置“運行”位、1~7級常用制動位、“快速”制動位以及“拔取”位等。
1.2.1 常用、快速制動
CRH2型動車組在常用、快速制動情況下,基于預先設定的制動模式曲線控制列車減速或者停車,采用具有時間常數的柔性控制方式,對列車減速度變化率進行控制。
制動控制裝置具有空重車調整功能,常用、快速制動時,減速度不受列車荷載的影響,動車組按照設定的減速度特性進行制動控制。
1.2.2 緊急制動
CRH2型動車組設有貫穿全列車的“得電緩解”緊急制動回路,回路失電時列車立即實施緊急制動。
在駕駛室內設有緊急制動開關,緊急情況下(如總風缸壓力不足,或列車分離,或緊急制動回路中斷或失電,或檢測到制動力不足,或列車運行控制系統發出緊急制動指令,或緊急電磁閥失電,或緊急制動開關動作時),緊急制動可以由司機起動或自動觸發。緊急制動時,動車組防滑裝置正常起作用進行防滑控制,避免車輪擦傷。
緊急制動作用時,同時自動觸發快速制動,制動控制裝置按照高位輸出的原則輸出制動缸壓力。
1.2.3 輔助制動
CRH2型動車組在兩頭車設置輔助制動模式發生器,當制動控制裝置異常、制動指令線斷線以及傳輸異常等情況下需要維持動車組低速運行時,閉合駕駛室內輔助制動斷路器,通過操作司機制動控制器,在兩頭車實施輔助制動,能產生相當于3級、5級、7級常用制動及快速制動。
2 動車組制動系統安全保障措施
從上可知,動車組制動系統是一個結構復雜、功能強大的自動控制系統和制動執行設備,自身具有非常完備的故障監測、報警和故障導向安全的控制功能,當制動系統的某一部件發生故障時,監測裝置會提示及報警,并采取相應的故障處理措施。表1歸納總結了CRH2型動車組列車制動系統的各種故障源及其處理對策措施。

表1 CRH2型動車組制動系統故障源及其導向安全策略
3 動車組制動系統故障后繼續運行對行車安全的影響
表1反映的是動車組制動系統發生故障的那一時刻對行車安全的影響和應對措施,不涉及之后繼續運行時的行車安全問題。根據《鐵路客運專線技術管理辦法(試行)(200~250 km/h部分)》[1]第 219 條、《鐵路客運專線技術管理辦法(試行)(300~350 km/h部分)》[2]第230條的規定,動車組列車在制動系統發生了故障、制動力被部分切除的情況下還需要繼續運行;為保障行車安全,要求采取限速措施。那么僅僅采取限速措施,就可以保證行車安全嗎?筆者認為有必要深入分析研究動車組制動系統故障后的行車安全問題。
3.1 動車組制動系統故障分類及對行車安全影響的初步分析
對表1中的各種故障源的后果進行分類梳理,可以細分出如下4類故障。
(1)第Ⅰ類故障:制動系統能自動監測到故障,故障后制動性能不受影響,列車可以繼續正常運行。
這類故障又可以分為2種情況,一種是制動系統具有故障冗余設計,利用冗余(備用)設備繼續保持動車組正常運行;另一種是動車組制動力沒有下降,停車后,隨車機械師檢查故障原因,解除故障后,制動系統恢復完好,列車再起動后正常運行。如表1中的A.1.1司機制動控制器無制動指令輸出、A.2.1光纖傳輸不良、A.3.1車重信息載荷信號異常、B.1.1空壓機故障以及D.1.1無法實施電制動等故障。
此類故障發生時,列車制動系統性能不受影響,因此其安全性沒有降低。
(2)第Ⅱ類故障:制動系統能自動監測到故障,故障后自動實施緊急制動,停車后不能繼續運行。
表1中的A.3.3控制裝置電源失電、B.1.2總風壓力不足以及B.2.1列車分離等故障屬于第Ⅱ類故障。該類故障發生時,制動系統自動觸發緊急制動,緊急制動過程中,利用列車風管的保壓量,其制動力并沒有下降。因此,其制動過程是安全的。另外,列車停車后,因故障不能修復,只能等待救援。救援后的行車安全這里不予討論。總之,第Ⅱ類故障沒有安全性問題。
(3)第Ⅲ類故障:制動系統能自動監測到故障,故障后需采取“關門車”處理,司機根據“關門車”的數量按相關規定進行限速后,列車可以繼續運行。
表1中的A.3.2個別車制動控制裝置不能實施制動功能、A.3.4制動控制裝置速度發電機斷線、A.3.5制動力不足、A.3.6抱死、A.3.7制動不緩解以及B.2.2管路泄漏的故障都屬于第Ⅲ類故障。
此類故障列控系統車載設備(以下簡稱為ATP)并不“知情”,對行車安全可能會產生一定影響。這是因為:部分車輛“關車門”后,該車輛的制動力也就不復存在,導致列車的整個制動性能下降,而ATP是按照列車制動系統工作正常、制動力為規定值并適當留出余量后對列車進行超速防護的。如果“關車門”數量較大,整個列車的實際制動力(或稱剩余制動力)小于ATP的計算值時,列車在后續的運行中,ATP將難以保證列車不超速、不冒進。
(4)第Ⅳ類故障:動車組制動力降低,且其故障得不到監測。
表1中只有一種這類故障,就是動車組制動夾鉗的工作狀態無法完全被監測到,其發生故障后,動車組的制動力會降低,司機和控制系統(包括動車組制動控制系統和列控系統)均不能立即得到信息。
與第Ⅲ類故障一樣,第Ⅳ類故障到達一定程度后,整個列車的實際制動力(或稱剩余制動力)小于ATP的計算值,對行車安全可能會產生一定影響。
第Ⅳ類故障一旦被發現后,可以采取“關車門”方式,即轉化為第Ⅲ類故障。
3.2 故障場景的安全性定量分析
限于篇幅,本文僅就CRH2型動車組在CTCS-2級列控系統完全監控模式下運行的特定條件,用定量分析法深入探討動車組制動系統發生第Ⅲ、Ⅳ類故障后的安全性。
CRH2-200型動車組在正線上運行的最高速度為200 km/h,考慮到部分動車段(所)的走行線上的線路最高允許速度為120、80 km/h,或動車組在正線上因故限速160、120 km/h運行,因此,本文選取200、160、120、80 km/h四個速度檔分別進行計算。
3.2.1 有關技術參數和計算公式
(1)列車取8輛編組,文獻[1,2]要求動車組制動系統切除50%制動力時還能限速運行,因此本文考慮其中可能有1~4輛車的制動力喪失的故障,對應的制動力切除比例值分別為 1/8、2/8、3/8、4/8。
(2)線路平均坡度:文獻[3]規定,高速鐵路區間的線路坡度一般不大于20‰(困難時不大于30‰),站內特別困難時可達6‰。
(3)道岔:高速鐵路道岔選取18號和12號兩種,其側向正常運行速度分別為80、45 km/h(列控系統的允許運行速度)。
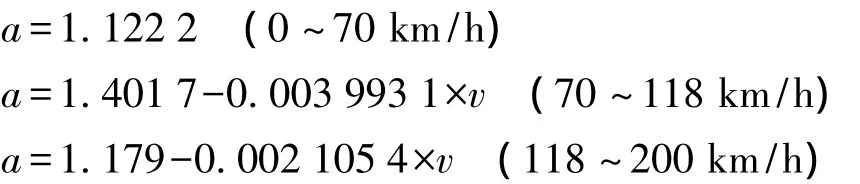
(4)CRH2-200 動車組制動性能[5]:
①最大常用制動減速度(7N)
a=0.747 2 (0~70 km/h)
a=0.933 6-0.002 662×v (70 ~118 km/h)
a=0.784 4-0.001 397 7×v (118 ~200 km/h)
②緊急制動減速度
③列車單位基本阻力
w0=0.880+0.007 44×v+0.000 114×v2
④制動延時空走時間
常用制動:2.3 s;
緊急制動:1.5 s。
(5)ATP生成最大常用制動曲線的制動力使用系數采用0.9,列車運行速度超過ATP允許運行速度5 km/h時觸發常用制動,超過10 km/h(250 km/h以下)時觸發緊急制動。
CRH系列動車組ATP計算的動車組制動距離Sz1采用以下公式[5]

式中 v0——制動初始速度,km/h;
v1,v2——分別為速度間隔的初速和末速,km/h;
tk——動車組空走時間,包括ATP延時時間、動車組制動系統延時時間,s;
a——動車組制動減速度(分常用制動和緊急制動);
β——ATP計算用制動力使用系數,緊急制動取1.0,常用制動取0.9;
w0——動車組列車單位基本阻力;
ij——制動地段加算坡度千分數,上坡取正值,下坡取負值。
(6)CRH系列動車組實際的制動距離Sz2算式如下
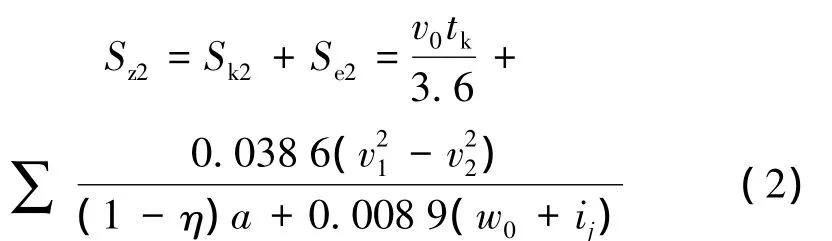
式中 η——制動力切除比例值(分別取1/8、2/8、3/8、4/8 等);
其余同(1)式。
(7)ATP 安全防護距離[6]
CTCS-2級列控系統的安全防護區位于信號機(點)的外方,其安全防護距離為區間110 m,站內60 m。由于ATP存在測速測距誤差等原因,列車實際停車點有可能進入ATP的安全防護區內,因此,以下計算不應考慮ATP安全防護距離的作用。
3.2.2 列車正線停車(含區間)
假設動車組在起模點處超速而觸發了最大常用制動,制動系統此時也恰巧發生了第Ⅲ類或第Ⅳ類故障。根據動車組列車在不同初始速度(指起模點處的運行速度,下同)、不同制動力切除比例、不同線路坡度條件,可以計算停車點冒進信號機(點)的距離,計算結果見表2。
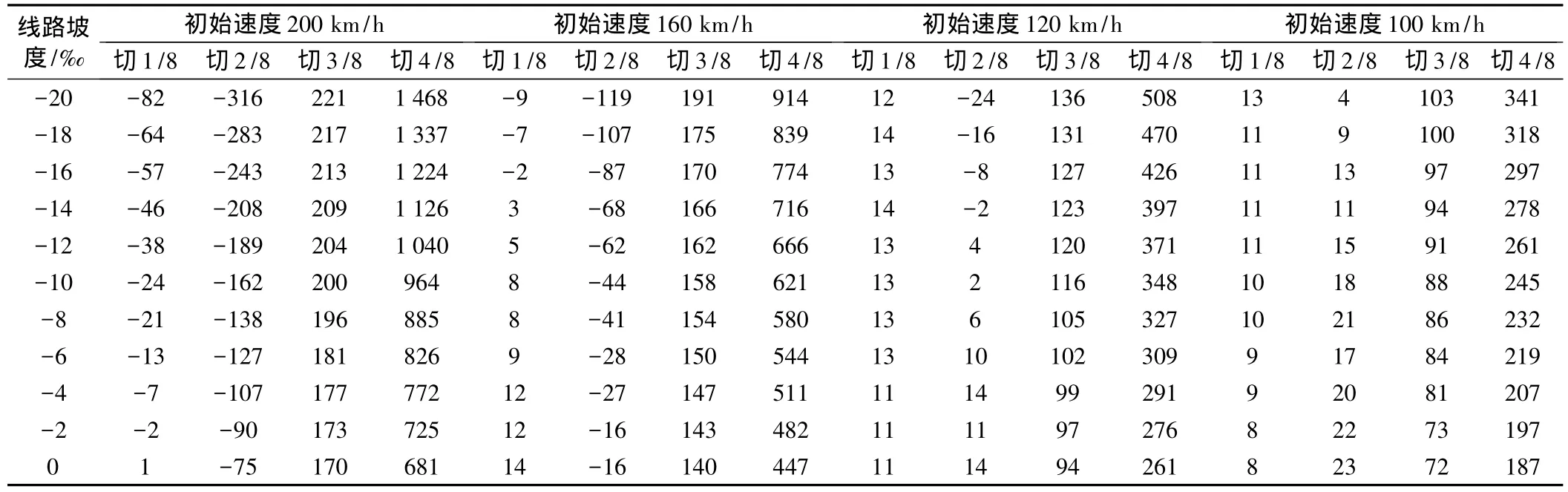
表2 正線停車時列車冒進信號機(點)的距離 m
從表2可以得出這樣的結論。
(1)列車冒進信號的距離值與列車的初始速度、切除后的剩余制動力、線路坡度等因素都有關系,但它們之間的關系比較復雜,不是簡單的單調遞增或遞減的函數關系。
(2)只要切除了部分制動力(即使是切除1/8),列車就有可能冒進信號機(點)。
(3)列車初始速度低時,冒進信號機的可能性反而更高,盡管其冒進的距離相對較短,但還是危及到行車安全。
(4)當制動力切除比例值≥3/8后,列車冒進信號的距離值較大;制動力切除比例值≥4/8后,列車冒進信號的距離值呈高速增長趨勢。
出現上述現象的原因分析如下。
前已說過,ATP按上式(1)計算制動距離,其制動力使用系數(β)都是一個事先設定值(常用制動取0.9,緊急制動取1.0),與列車實際制動力大小沒有任何關系。而動車組實際制動曲線按上式(2)生成,列車剩余制動力的大小是由動車組各輛車的制動系統工作狀態決定的,一旦某輛車(或某幾輛車)的制動力因故喪失,會導致動車組整個制動系統的制動力下降。當動車組制動系統實際的剩余制動力小于ATP計算用制動力時,列車減速過程就會放緩,實際運行速度將越來越高于ATP常用制動允許的速度值。因此,動車組的實際制動曲線可能由2段曲線組成,如圖1所示。第一段是從初始速度開始的常用制動曲線,該段曲線動車組使用剩余常用制動力;當該段曲線碰上ATP控制的緊急制動曲線時(圖中的轉換點處),ATP立即轉為緊急制動,第二段曲線是從轉換點開始的緊急制動曲線,動車組使用剩余緊急制動力。
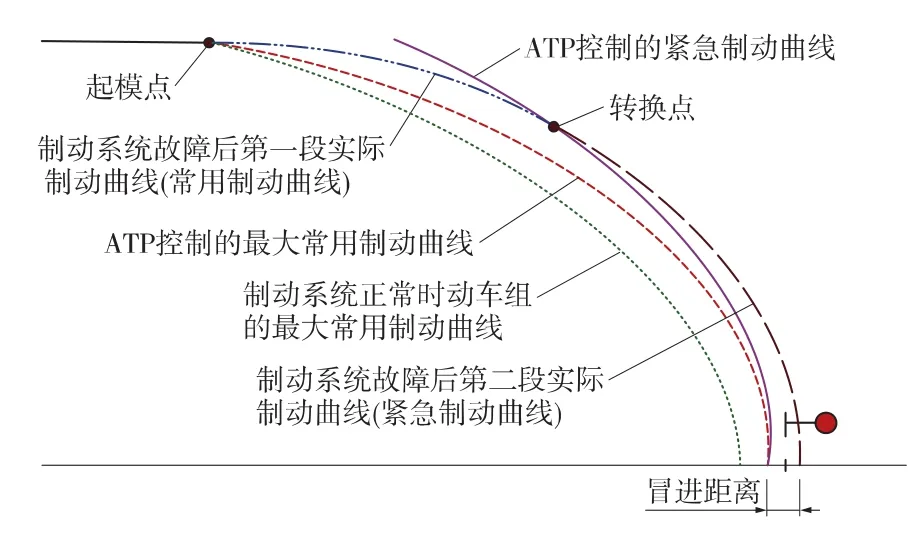
圖1 動車組制動曲線關系
常用制動轉緊急制動的轉換點與初始速度、切除后的剩余制動力、線路坡度有關,基本規律是:初始速度越高,或剩余制動力越小,轉換點就越早,常用制動段也就越短、緊急制動段越長,兩者之間存在著此消彼長的關系。
當轉換點發生得較早時,如果動車組剩余緊急制動力大于ATP的常用制動力取值,則緊急制動距離消減的效果可能比較明顯,使得實際的整個制動距離值有可能小于ATP計算的常用制動距離值,此時,列車運行是安全的;但如果動車組剩余緊急制動力與ATP的常用制動力取值相差不大(有的列車在低速區就有這種現象),則緊急制動距離消減的效果不大,使得實際的整個制動距離值仍有可能大于ATP計算的常用制動距離值,此時,列車將冒進信號機。
當轉換點發生較晚時,常用制動段較長,常用制動距離延長的效果可能比較明顯,使得實際的整個制動距離值大于ATP計算的常用制動距離值,列車將有可能冒進信號機。
還有一種情況,當動車組初始速度較低,或剩余制動力較大時,動車組的實際常用制動曲線雖然超過了ATP控制的最大常用制動曲線,但沒有觸碰到ATP控制的緊急制動曲線,沒有觸發緊急制動(即沒有出現轉換點),整個制動過程只有一個常用制動段,這時,實際制動距離(或冒進信號機的距離)與列車初始速度、剩余制動力之間才是一種單調函數關系。
以上結論同樣適用于下面側線接車場景的分析。
3.2.3 列車側線進站停車
按照列車制動系統發生故障的時機,又可以分為如下2種情形。
(1)列車在駛入進站信號機前發生制動系統故障時
當列車在越過進站信號機前發生動車組制動系統故障時,影響列車進站安全性的關鍵之處有2個方面:一是列車進站速度是會否超過道岔側向限速(即是否會存在側翻危險),另一個是列車是否會冒進股道上的出站信號機或警沖標。
假設動車組在站外起模點處超速而觸發了最大常用制動,制動系統此時也恰巧發生了第Ⅲ類或第Ⅳ類故障。根據動車組列車在不同初始速度、不同制動力切除比例、不同線路坡度和站內不同道岔號條件,可以計算列車側向進站時的速度值和進入進站信號機后的制動走行距離值。表3、表4是站內采用18號道岔時的計算結果。
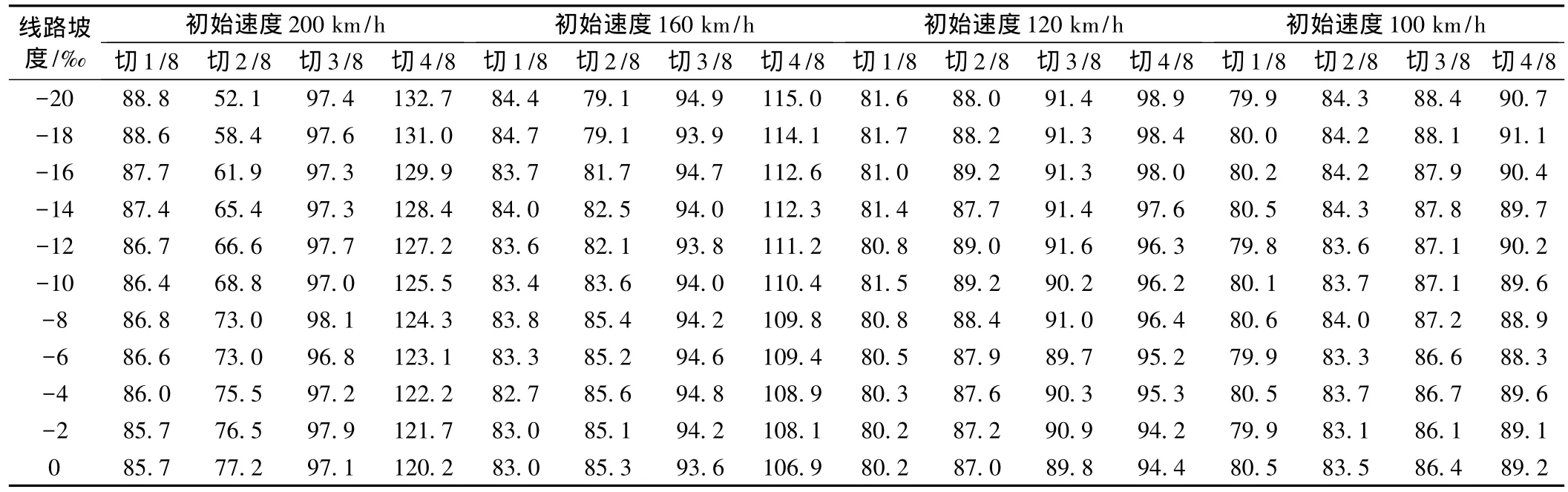
表3 側線進站時列車速度km/h
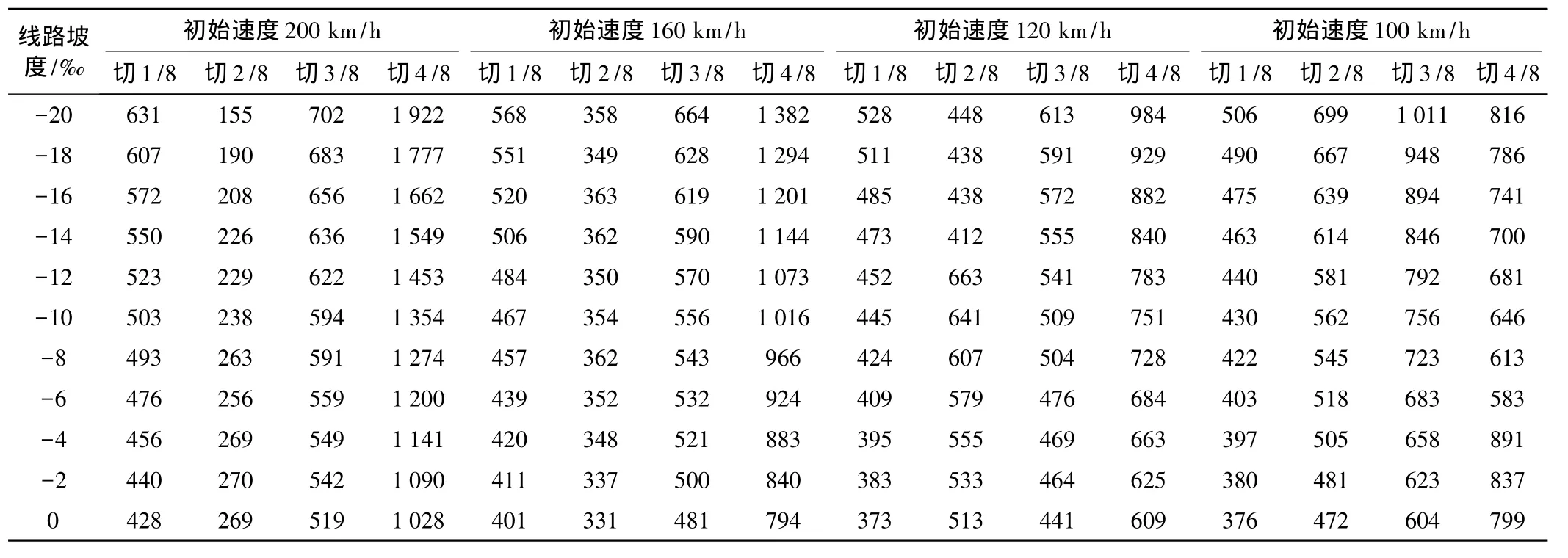
表4 側線進站時列車在站內的制動走行距離 m
表3、表4所示的結果表明。
①列車側向進站時的速度值和進入進站信號機后的制動走行距離值與列車的初始速度、切除后的剩余制動力、線路坡度等因素都有關系,它們之間的關系也不是簡單的單調函數關系。
②只要切除了部分制動力(即使是切除1/8),列車的進站速度值就有可能超過道岔的規定限速值,制動力≥3/8后,其過岔速度呈高速增長趨勢,列車側翻的危險性大增。
③考慮到我國高速鐵路普通車站同方向進、出站信號機之間的距離都比較長(絕大多數都在1 000 m以上,但一般不超過1 500 m),當制動力切除量不超過3/8時,列車基本上不冒進出站信號機;但按照發展趨勢,當切除的制動力超過3/8,或者(和)列車初始速度很高時,列車就有可能冒進出站信號機,甚至還有可能冒進警沖標(根據文獻[3]的規定,出站信號機至警沖標的距離為55 m;文獻[7]則補充規定,出站信號機至警沖標的距離不宜小于30 m,困難條件下不小于20 m)。
(2)列車在越過進站信號機后發生動車組制動系統故障時
假設動車組在站內起模點處超速而觸發了最大常用制動,制動系統此時也恰巧發生了第Ⅲ類或第Ⅳ類故障。根據動車組列車在不同初始速度、不同制動力切除比例、不同線路坡度條件,可以計算停車點冒進出站信號機的距離。
在暫不考慮股道上出站應答器絕對停車報文觸發動車組緊急制動這一因素的前提下,計算結果如表5所示。

表5 側線進站后列車冒進出站信號距離m
計算結果表明:動車組制動力部分切除后,列車有可能冒進出站信號機。當切除制動力大于3/8后時,列車還有可能冒進警沖標,有列車沖突的危險。
3.2.4 小結
通過以上定量分析,可以看出:動車組制動系統故障、制動力下降后,列控系統即使處于完全監控模式,也不能保證動車組列車不冒進停車信號;而且列車速度較低時,冒進信號的幾率較大,速度較高時,冒進信號的距離較大;另外,當制動力下降到一定程度后,列車在側向進站的過程中還有可能存在因超過道岔規定限速而側翻的危險。
不同型號的動車組發生危險的程度會不一樣,但其趨勢是一致的。
4 結論
綜上分析,可以得出如下幾點結論。
(1)CRH系列動車組采用(制)動力分散、電空復合制動并優先使用電制動,以及冗余型空氣供給系統等技術方案大大提高了列車制動系統冗余度和安全性能。
(2)動車組制動系統自身具有非常完備的故障監測、報警和故障導向安全的控制功能,當制動系統的某一部件發生故障時,監測裝置會提示及報警,并采取相應的故障處理措施,有利于動車組的安全運行。
(3)盡管動車組制動系統具有完善的安全保障措施,但在實際運營中仍需考慮其故障后的安全性。通過定量分析表明,動車組制動系統發生故障后,即使列控系統正常工作在完全監控模式下,僅靠人工限速手段并不能保證動車組的行車安全,動車組列車仍存在冒進和超速的危險,需要采取其他更加有效的安全防護對策。
[1]中華人民共和國鐵道部.鐵路客運專線技術管理辦法(試行)(200~250 km/h部分)[S].北京:中國鐵道出版社,2009.
[2]中華人民共和國鐵道部.鐵路客運專線技術管理辦法(試行)(300~350 km/h部分)[S].北京:中國鐵道出版社,2010.
[3]中華人民共和國鐵道部.高速鐵路設計規范(試行)[S].北京:中國鐵道出版社,2009.
[4]張曙光.CRH2型動車組[M].北京:中國鐵道出版社,2008.
[5]中華人民共和國鐵道部.列車運行監控裝置(LKJ)控制模式設定規范[S].北京:2009.
[6]中華人民共和國鐵道部.科技運[2007]45號 既有線CTCS-2級列控系統車載設備技術規范(暫行)[S].北京:2007.
[7]石先明,張敏慧.高速鐵路列控系統安全性分析與改進[J].鐵道標準設計,2012(11).
[8]中華人民共和國鐵道部.關于印發《客運專線信號工程設計研討會會議紀要》的通知(運基信號[2010]495號)[Z].北京:2010.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
