基于STC89C52多功能斜井運輸監控系統的設計
2013-09-04 00:47:00李亞韞
機械工程與自動化 2013年6期
李亞韞
(山西職業技術學院 電氣工程與自動化系,山西 太原 030006)
0 引言
目前,煤礦斜井控制系統功能比較單一,大多依靠速度傳感器檢測運輸礦車的速度來控制斜井內護欄的動作,如果運輸車超速,則護攔動作,攔截小車。但是,由于現場中存在電氣及其他干擾,可能造成信號識辯的錯誤,使護攔產生誤動作。加上現場條件所限,工作人員無法直接觀察和掌握礦車的實際運行過程,造成護攔的起落不能及時與運輸礦車配合(如在車來時需要提升而不能及時提升,車過后需要落下而不能及時落下;出現跑車時不能及時攔截等),致使工作效率低下,事故時有發生。此外,在煤礦斜井運輸時,要保證斜井內交叉口運輸車在同一時刻為單方向行駛,避免一條巷道內同時出現兩個方向的小車這類危險事故的發生。所以,隨著煤礦生產機械化、自動化程度的不斷提高,原有斜井控制系統越來越不適應安全生產的需要。本文重點介紹基于STC89C52的多功能斜井運輸監控系統的設計,該系統是集監測、顯示、報警于一體的監測控制系統,可實現煤礦安全生產的自動化控制。
1 多功能斜井運輸監控系統組成
1.1 主控制電路
該系統以STC89C52單片機作為主控制芯片,利用可編程控制芯片8255擴展并行I/O接口實現控制信號的有效輸出。輸入信號采用GUC100礦用接近傳感器進行現場采集。現場輸入信號以及輸出控制信號均采用光電耦合進行隔離,有效實現了電氣隔離,避免了干擾。多功能斜井運輸監控系統的結構框圖如圖1所示。
1.1.1 輸入端信號采集
本系統中輸入端為GUC100礦用本安型接近傳感器(見圖2),它由震蕩器和整形放大器組成。振蕩器起震后,傳感器的感應頭上產生交變磁場,當金屬體接近感應區時,金屬體內產生渦流,從而吸收振蕩器能量,使其停振,經整形放大后轉換為開關信號。此傳感器的外形材質為H62銅材,殼體內有全密封傳感器機芯,它具有防爆特性,適用于礦井巷道內安裝。傳感器使用及與單片機接口如圖3所示。

圖1 多功能斜井運輸監控系統結構框圖

圖2 GUC100礦用本安型接近傳感器
1.1.2 光電耦合
此監控系統運行環境的特殊性決定了輸入信號的采集以及輸出控制信號的作用大多在井下完成,這與主控系統之間不可避免地要進行長距離傳輸。如果相距較遠的設備之間直接用電纜連接的話會因地線而產生電位差,從而引起環路電流,形成差模干擾電壓,導致傳輸信號發生畸變或失真。因此為了確保長距離傳輸的可靠性,本系統采用光電耦合隔離措施。將兩個電路的電氣連接隔開,切斷可能形成的環路,使他們相互獨立,提高電路系統的抗干擾性能。若傳輸線較長,現場干擾嚴重,可通過兩級光電耦合將長線完全“懸浮”起來,如圖4所示,這樣去掉了兩級之間的公共地線,能夠有效消除各電路的電流經公共地線時可能會產生的干擾,而且當輸出端受控設備短路時還能保護系統不受損害,同時也一定程度上解決了長線驅動和阻抗匹配的問題。
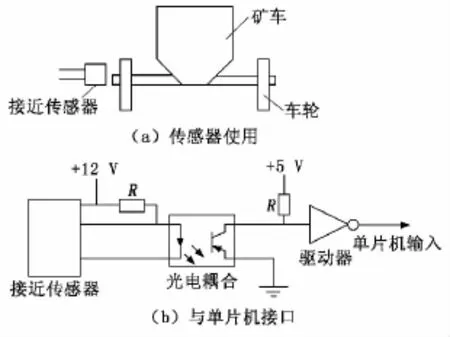
圖3 輸入傳感器使用及與單片機接口示意圖

圖4 長距離傳輸兩級光電耦合
1.1.3 輸出端受控設備
系統中輸出端受控設備為以下3類:井下指示燈、護欄控制器、絞車房同步模擬顯示盤。CPU根據現場輸入信號進行邏輯判斷,從而發出控制信號使相應受控設備動作。其中井下指示燈與絞車房模擬顯示盤為同步輸出信號。
1.2 電源電路
電源電路主要進行電壓轉換工作。電源電路的輸入是交流127V,經過轉換分別輸出直流+5V、+12 V、+24V電壓,供給主控芯片、電流環電路、報警電路、通訊電路,使其正常工作。
1.3 報警電路
報警電路由語音電路、功率放大電路和喇叭驅動電路等組成。主控芯片輸出相應控制信號對現場進行控制,同時驅動語音電路。
2 控制要求
巷道模擬控制如圖5所示。
(1)若A處有車通過時,傳感器檢測信號送單片機輸入口,該處指示燈由綠燈變為紅燈,表明此道已占用,不允許上行車進入,同時絞車房模擬顯示盤相應位置的信號燈亮。在規定時間內護攔1打開,礦車正常運行;若沒有打開,則報警且發出急停信號。
(2)若同時J處有上行車通過時,傳感器檢測信號送單片機輸入口,模擬顯示盤相應位置信號燈亮,提示打開護攔4。在規定時間內護攔4打開,礦車正常運行;若護攔沒有打開,則報警且發出急停信號。護欄4打開后,要檢測H或I處是否有車通過。若H處有車通過,模擬顯示盤相應位置信號燈亮,則報警且發出急停信號,I處有車則正常運行。
(3)當D處的傳感器檢測到有車通過時,給單片機接口送入信號,模擬顯示盤相應位置信號燈亮,且A燈滅。同時判斷護攔2的狀態,若是打開的,則正常運行;若不是,則報警且發出急停信號。
(4)當F處的傳感器檢測到有車通過時,給單片機接口送入信號,模擬顯示盤相應位置信號燈亮,且D燈滅。同時判斷護攔3的狀態,若是打開的,則正常運行;若不是,則報警且發出急停信號。
(5)當礦車經過H處時,有信號送入單片機接口,模擬顯示盤上相應位置的信號燈點亮,且F燈滅。同時判斷護攔4是否打開,若打開,則礦車正常運行;若沒有,則報警且發出急停信號。
(6)當礦車下行經過J處時,給單片機接口送入信號,讓模擬顯示盤相應位置的信號燈點亮,且H燈滅。提示護攔4落下。
(7)上行過程與此相似。礦車經過傳感器的檢測點時,模擬顯示盤相應位置的信號燈亮,且前一處的信號燈滅。若護欄1、4采用自動控制,當車上行經過B處時,給計算機接口送入信號,讓模擬顯示盤相應位置的信號燈點亮,發出報警信號,提示現場工作人員本次運輸結束,同時護欄1、4自動落下。若采用手動控制,只發出報警信號,不能自動落下。
(8)若下行時C處有車通過,模擬顯示盤相應位置的信號燈亮,該路綠燈滅紅燈亮,執行過程同上,但在第2步驟,當檢測到I處有車通過時,其對應燈亮,并報警且發出急停信號;若H處有車,則正常工作。

圖5 巷道模擬控制圖
3 技術參數
該系統的主要技術參數如下:
工作電壓:AC220V/AC127V±15%;
工作電流: <5A;
報警工作電壓: DC24V;
報警功率: ≥5W。
4 結束語
本系統應用STC89C52單片機作為主控制芯片,對現場信號進行監測和邏輯判斷,從而控制護攔動作和報警裝置,并實時顯示礦車的運行位置。利用可編程控制芯片8255對單片機I/O口進行并行擴展,同時輸入、輸出通過光電隔離電流環進行長距離傳輸,解決了普通電纜傳輸高速數據可靠性低的問題。系統中增加語音功能,能夠準確提示運輸過程中可能出現的故障。在軟件設計中采用冗余措施及WATCHDOG來解決干擾問題。總之,系統運行以來發出的控制信號及時、準確、可靠,極大地提高了現場工作的可靠性,而且能耗低,符合煤礦安全生產的需要,實現了井下工作的自動控制。
[1] 賈世圣.基于PLC和單片機的礦井軌道運輸監控系統設計[J].中國礦業,2008(6):105-107.
[2] 黃河,王信,劉福華,等.基于FCS的煤礦井下電機車運輸監控系統的研究與應用[J].煤礦機械,2013(3):253-255.
[3] 周廣興,姜永春,張廣蘭,等.單片機在礦井提升機打點器中的應用[J].煤礦機械,2004(7):87-88.
[4] 何立民.MCS-51系列單片機應用系統設計[M].北京:北京航空航天大學出版社,1992.
[5] 苗長云.單片機在井下運輸軌道監測系統紅外跟蹤傳感器中的應用[J].煤礦自動化,1992(3):15-18.
[6] 潘新民.王燕芳.微型計算機控制技術[M].北京:高等教育出版社,2001.
[7] 寇建國.人體紅外感應技術在斜井運輸管理上的應用[J].山東煤炭科技,2012(3):37-38.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
