藍莓植株中心定位與運行軌跡的研究
2013-09-06 03:11:46李志鵬郭艷玲王海濱
森林工程 2013年5期
關鍵詞:方向
李志鵬,郭艷玲,王海濱
(1.東北林業(yè)大學交通學院,哈爾濱150040;2.東北林業(yè)大學機電工程學院,哈爾濱 150040)
藍莓果樹是21世紀最具發(fā)展?jié)摿Φ臉浞N,藍莓果市場需求龐大,是近幾年世界發(fā)展最為迅速的、集營養(yǎng)與保健于一身的第三代果樹。由于藍莓果實軟和果粒小,導致采摘困難,藍莓的種植受到限制,發(fā)展機械化采摘,成為我國藍莓產業(yè)的迫切需求和必然趨勢。
藍莓采摘機的車架是門式結構,在采摘過程中它橫跨在藍莓樹上,并按照藍莓樹列的方向前進。要想實現(xiàn)自動采摘,就必須保證藍莓采摘車避免和藍莓樹干發(fā)生碰撞干涉,因此必須對藍莓采摘車的運行軌跡進行規(guī)劃,確保采摘工作的完成。
1 采摘車行走軌跡規(guī)劃的研究
1.1 藍莓采摘車軌跡規(guī)劃的步驟
首先利用圖像識別技術得到藍莓植株的輪廓,估計輪廓尺寸,得出的藍莓植株中心位置并計算出藍莓植株的中心線,并據(jù)此調整藍莓采摘機車體的進給朝向,為軌跡引導和規(guī)劃做準備。
其次藍莓采摘機具有運動約束,只能前后運動和轉動,而不能橫向運動,而且在轉動時有最小轉彎半徑的要求。
最后要考慮藍莓采摘車的實際尺寸,提前預測運動方向,否則可能會造成藍莓采摘機與植株距離太近而使藍莓采摘機無法順利進入采摘狀態(tài)。藍莓采摘車路徑規(guī)劃流程如圖1所示。
1.2 藍莓采摘車運行軌跡要求
(1)藍莓樹的高度和寬度不應超過門的高度和寬度太多。
(2)藍莓采摘機是按照藍莓樹列的中心線運行。
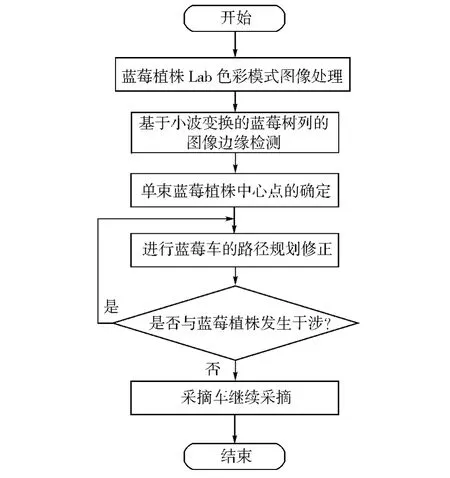
圖1 采摘車路徑規(guī)劃流程圖Fig.1 Flowchart of the path planning of the picking cart
(3)藍莓采摘機在行進過程中不能越過中心線,這就使藍莓采摘機的左右轉動非常有限,與周圍的環(huán)境障礙物必須保持最小的安全距離。
(4)在藍莓列頭轉彎時,要充分考慮藍莓采摘車最小轉彎半徑。
2 藍莓植株中心線的確定
2.1 基于Lab色彩模式的藍莓植株檢測
Lab模式是根據(jù) CommissionInternationale Eclairage(CIE)在1931年所制定的一種測定顏色的國際標準建立的。它是CIE組織確定的一個理論上包括了人眼可以看見的所有色彩的色彩模式。Lab模式彌補了RGB和CMYK兩種色彩模式的不足。圖2為原始圖像,圖3是在Lab顏色空間的藍莓圖像[1]。

圖2 原始藍莓圖像Fig.2 Original blueberry image

圖3 Lab顏色空間的藍莓圖像Fig.3 Blueberry image lab color space
2.2 基于小波的藍莓植株圖像邊緣檢測
小波變換是一種信號的時間—尺度分析方法[2],它在時頻兩域都具有表征信號局部特征的能力,對任意信號f(t)∈L(R)2,f(t),的連續(xù)小波變換定義是:

稱Ψ(t)小波,當母小波成為小波時,可由Wf(a,b)恢復出原信號f(t)。

圖像f(x,y)為二維函數(shù)和不同尺度α上的光滑函數(shù)θσ(x,y)卷積將使圖像f(x,y)被光滑,以二進制的小波變換表示,即取α=2j則有:

二進小波變換分別是在尺度α=2j時所平滑圖像f(x,y)沿水平方向和垂直方向的部分導數(shù),它對應于圖像水平方向和垂直方向的邊緣信息,可被看作所平滑圖像后的梯度矢量的模和幅角,因此只需沿梯度矢量方向檢測模的極大值點的位置,就給出了圖像的一個多尺度邊緣[3]。
2.3 單株藍莓植株中心點的估算
藍莓采摘機行走軌跡的中心線即根據(jù)兩條隨意不相交的曲線,求解出一系列位于不同位置但在曲線之間的點,滿足點到兩條曲線的距離最短且距離相等,然后由這些點連接起來,就可成為兩條曲線間的中心線。例如設這兩側極限邊緣點的坐標分別為 (xi,yi)和 (xj,yj),則求出兩側極限邊緣點中心坐標為 (xk,yk),并根據(jù)公式可以導出兩點連線的斜率T和中垂線的斜率k。
對于每一個直線方程,以所求的中心點為起點,由中垂線斜率判斷該小段曲線的方向性,并相繼對該點相對應的變量的橫坐標累加或者累減一個步長,用直線方程求解對應的縱坐標,根據(jù)距離公式:

求出這對坐標到中點的距離d,載入曲線下邊的數(shù)據(jù),掃描數(shù)據(jù)得出變量對到曲線下邊點的距離l,設曲線下邊的點的坐標用 (xi,yi)表示:

同時循環(huán)地將兩個距離的差的絕對值|l-d|與精度q作比較,當滿足|l-d|<q時,此時的變量對坐標就是要求的曲線中心中的一點[4]。
2.3 中心線檢測實驗
采用自主研發(fā)的藍莓自動采摘機,單邊驅動。圖片采集采用CCD攝像頭,安置在車架門楣處,此時若行走方向端正,可得到藍莓植株的正向圖片,但如行走方向偏轉,方向也會隨之變化,圖4是單株藍莓植株。

圖4 單株藍莓植株Fig.4 Single blueberry plant
地面長期覆蓋黑色農膜,起到防止雜草生長、保持土壤水分及保溫的作用。黑色農膜與藍莓顏色接近,故進行圖像分割時,應先對藍莓樹叢進行分割識別,如圖5所示。
拍攝的圖像經過去噪后,通過公式 (4)和公式 (5)求出藍莓植株中心線和實際的藍莓植株測量獲得表1,藍莓植株實際中心線與圖像中心相差100個像素,正數(shù)表示綠樹中心線在圖像中心線左側,負數(shù)表示在圖像中心線右側,因此藍莓采摘機應按要求調整行進方向[5]。

圖5 降噪后的藍莓植株Fig.5 The image of blueberry plants after denoise processing

表1 中心線實際測量 單位:pixTab.1 The actual measurement of the center line pix
3 結論
通過對藍莓植株現(xiàn)場測量和圖像分析測試對比,二者基本吻合,說明通過圖像處理能夠真實地反映藍莓植株的中心位置,能引導藍莓采摘車按照藍莓植株中心位置進行運動,為藍莓采摘機軌跡規(guī)劃做好了準備。
】
[1]張宏建.Lab色彩模式在圖像處理中的應用[J].福建電腦,2011(1):146-147.
[2]梁亦強,李正明,孫 俊.一種新小波圖像降噪方法在農業(yè)采摘中的應用[J].安徽農業(yè)科學,2010,38(4):2061 -2063.
[3]蔡漢添.小波變換域中圖像噪聲平滑技術[J].光學技術,1998(6):6-9.
[4]司永勝,姜國權,劉 剛,等.基于最小二乘法的早期作物行中心線檢測方法[J].農業(yè)機械學報,2010,41(7):163 -167.
[5]李志鵬,趙德金,郭艷玲.基于Matlab藍莓樹枝軸向有阻尼自由振動仿真研究[J].森林工程,2013,29(4):53 -55.
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數(shù)學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數(shù)學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50