基于AMEsim的帶式輸送機仿真建模方法研究
2013-09-07 08:56:02趙東升
中國礦業 2013年2期
關鍵詞:模型
趙東升
(太原理工大學機械工程學院,山西 太原030024)
帶式輸送機從發明沿用至今已經有150多年歷史,在國民經濟生產的各個行業得到了廣泛的應用,并取得很好的經濟效益。近些年,隨著高帶速、長運距、大運量的帶式輸送機的出現,帶式輸送機的動態特性研究已經成為國內外學者研究的一個熱門課題。目前對于帶式輸送機的動態特性研究,面臨最大的難題是帶式輸送機動力學仿真模型建立比較困難,動力學模型求解過程繁瑣復雜。本文利用AMEsim動力學軟件強大的動力學建模功能建立了帶式輸送機的動力學仿真模型,可以得出帶式輸送機的主要部件各種工況下的動態特性。
1 帶式輸送機動力學模型的分析
帶式輸送機主要由機架、輸送帶、滾筒、上下托輥、驅動系統、張緊裝置等主要部件組成,如圖1所示。輸送帶作為帶式輸送機的承載和運輸主要部件之一,具有明顯的粘彈性力學特性。帶式輸送機清掃裝置、導料槽、卸料裝置等輔助配套設備所產生的附加阻力在動力學仿真建模時不予考慮。對輸送距離較長的帶式輸送機在建模時有必要引入有限元分析法。利用有限元分析法將連續的輸送帶系統簡化成離散的動力學模型,目前建立輸送帶比較成熟的模型是Kelvin離散模型。
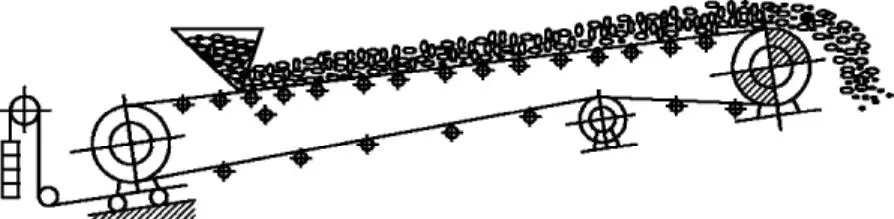
圖1 帶式輸送機工作示意圖
建立的帶式輸送機動力學仿真模型是基于以下假設條件:①假設輸送帶上物料的質量和輸送帶的質量在正常運行過程中是均勻分布的;②輸送帶在回程段和承載段的阻力是沿輸送帶運行的路徑均勻分布,輸送帶的帶速和模擬摩擦阻力系數成線性關系;③再進行單元劃分時,將驅動滾筒和改向滾筒的質量和轉動慣量折算到輸送帶單元中;④輸送帶的縱向振動不予考慮,僅考慮輸送帶的縱向拉伸;⑤在不影響分析結果的前提下,對輸送機的布置線路進行簡化,對于傾斜角度較小的帶式輸送機我們在建模時,可以將其視為水平。
2 利用AMEsim軟件來實現帶式輸送機的動態仿真模型
2.1 有限元離散單元劃分
AMEsim提供了一個高級工程系統建模仿真的完整平臺,利用其內部機械元件庫、信號控制庫、液壓庫、動力傳動庫可以建立一維多學科領域復雜的機電液一體化仿真模型。利用AMEsim可研究帶式輸送機系統或者系統各個元件的穩定性能和動態特性。
以布置線路近似水平的長距離帶式輸送機為例來進行離散模型的劃分。設帶式輸送機從機頭到機尾的距離全長L公里,將l米輸送帶劃分為一個有限元離散單元,即l米輸送帶組成一個Kelvin模型,輸送帶的Kelvin如圖2所示。這樣承載段和回程段的輸送帶(包括儲帶倉)總共可得到n個單元:
式中,n為輸送帶所劃分成的單元數;L為機頭至機尾輸送帶的總長,km;l為每個單元輸送帶的長度,m。
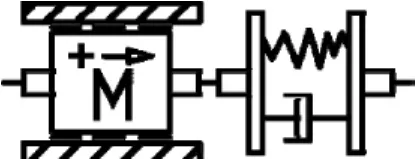
圖2 輸送帶的Kelvin模型
在輸送帶的Kelvin模型中,有關參數的計算如下:
1)質量塊參數的計算
承載段輸送帶離散單元的質量:
空載時,

滿載時,

回程段輸送帶的質量:

式中,mik為空載時承載段輸送帶離散單元的質量,kg;mim為滿載時承載段離散單元的質量,kg;mi為回程段離散單元的質量,kg;qB為單位長度輸送帶的質量,kg/m;qRo為承載段每米托輥旋轉部分的質量,kg/m;qRU為回程段每米托輥旋轉部分的質量,kg/m;qG為單位長度輸送帶所載物料的質量,kg/m;l為輸送帶離散單元的長度,m;
2)阻尼系數和剛度系數的計算
剛度系數的計算:

阻尼系數的計算:

式中:ki為Vogit模型的剛度系數;ci為Vogit模型的阻尼系數;E為輸送帶的彈性模量,GPa;B為輸送帶的帶寬,m;τ為輸送帶的流變常數;l為每個單元輸送帶的長度,m。
2.2 輸送帶與滾筒及托輥接觸摩擦邊界條件的處理
輸送帶與滾筒、托輥之間的摩擦力是帶式輸送機動力學建模的重點之一。輸送帶與驅動滾筒之間的接觸摩擦關系如圖3所示。在進行輸送帶和滾筒之間的接觸摩擦處理時,一般將其之間的關系簡化為普通的帶傳動原理來分析。輸送帶的緊邊和松邊之間的拉力關系式為

式中:F1為輸送帶緊邊的拉力;F2為輸送帶松邊的拉力;μ為輸送帶與滾筒之間的摩擦系數;a—為包角;e為自然對數的底。
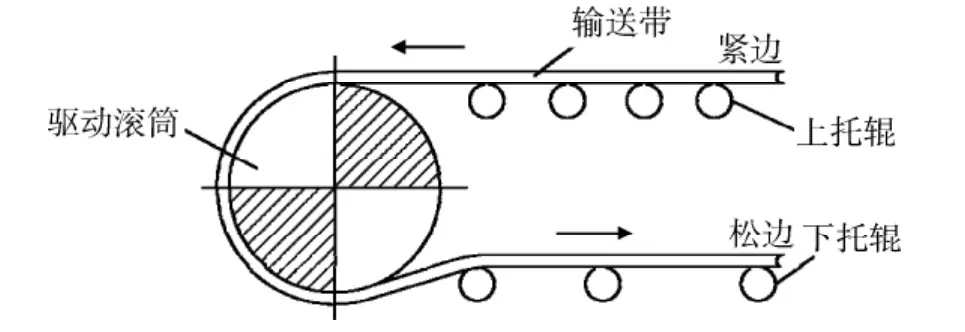
圖3 驅動滾筒與輸送帶之間的傳動摩擦原理
建立仿真模型時候,在AMEsim中,可以用機械模型庫中旋轉負荷模型來實現驅動滾筒、改向滾筒的轉動慣量。輸送帶與驅動滾筒之間總的摩擦力Ft為:

式中,Ft為輸送帶與驅動滾筒之間總的摩擦力;F1為輸送帶緊邊的拉力;F2為輸送帶松邊的拉力。
對于輸送帶與滾筒之間的摩擦力也可以通過在旋轉負荷模型中設置粘性摩擦系數、靜摩擦、庫侖摩擦力來實現。
本文在AMEsim中建立輸送帶的動力學模型時選擇了雙面摩擦質量塊可以模擬出物料與輸送帶之間、輸送帶與托輥之間的接觸摩擦。雙面質量塊的參數設置包括質量、粘性摩擦系數、庫侖摩擦力、靜摩擦力 、傾角等參數。
3 應用實例
在進行帶式輸送機的建模時所需要帶式輸送機主要技術參數如表1所示。該條帶式輸送機布置線路傾斜角約18°,近似水平處理,驅動方式采用機頭“2+1”驅動加中驅“2+1”驅動,機尾上料,機頭卸載,均勻物料分布。啟動方式采用可控變頻軟啟動方式。
在建立的帶式輸送機的仿真模型時,將機頭和機尾的“2+1”驅動簡化成為單滾筒前驅,建立的帶式輸送機仿真模型,如圖4所示。對建立好的帶式輸送機動力學模型進行仿真運行,可以得出各個部件在運行過程中的動態特性。
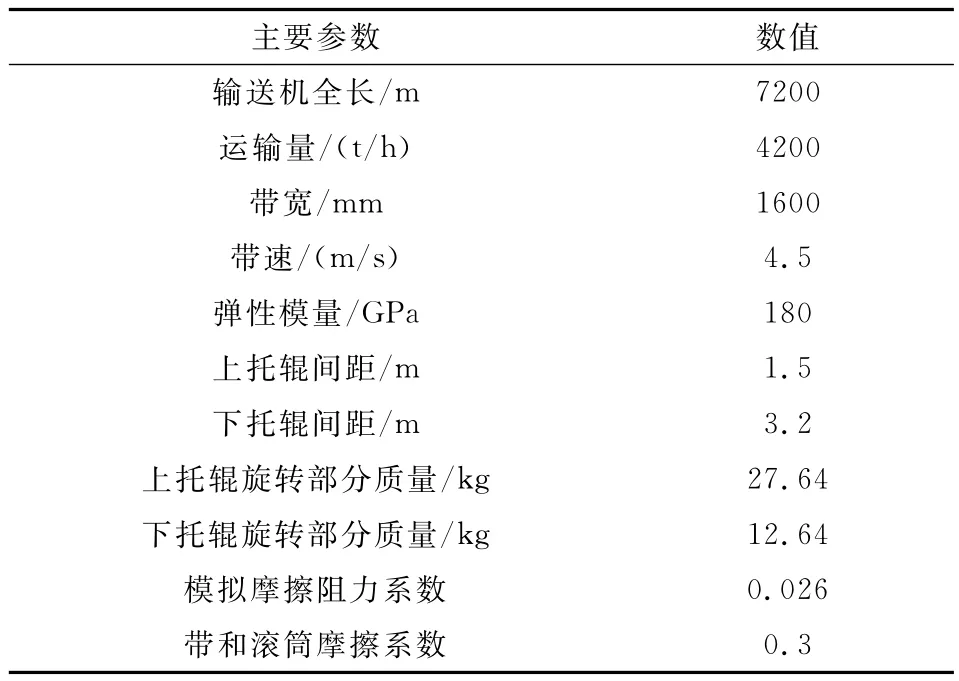
表1 帶式輸送機的主要技術參數

圖4 帶式輸送機的仿真模型
利用建立好的帶式輸送機仿真模型,我們得出了帶式輸送機在滿載啟動工況下,承載段輸送帶的動態特性。滿載啟動時,承載段輸送帶速度變化3D曲線,如圖5所示。在圖5中,X軸表示啟動時間,Y軸表示承載段輸送帶的單元個數,Z軸表示輸送帶單元速度的大小。從速度變化3D曲線可以看出,在滿載啟動時,機頭輸送帶運行大約50s左右后,機尾的輸送帶才開始運行,體現輸送帶的粘彈性特性。
滿載啟動過程中,承載段輸送帶位移變化3D曲線,如圖6所示。X軸表示啟動時間,Y軸表示承載段輸送帶的離散單元數,Z軸表示輸送帶離散單元的位移大小。整個運動過程中的位移差最大值達到46.5m左右。在輸送帶穩定運行后,機頭機尾的位移差大約是13m左右。
滿載啟動時,承載段輸送帶張力變化3D曲線,如圖7所示。X軸表示啟動時間,Y軸表示承載段輸送帶的離散單元數,Z軸表示輸送帶離散單元受到張力的大小。張力在55s才傳到機尾,機尾輸送帶在張力的作用下逐漸開始加速。在帶式輸送機整個啟動過程中,靠近機頭驅動裝置部分的輸送帶的張力遠遠大于機尾輸送帶的張力。在帶式輸送機穩定運行后,機頭輸送帶張力大約是1120kN,機尾輸送帶的張力大約是230kN,機頭輸送帶的張力大約是機尾的4.87倍。

圖5 滿載啟動時,承載段輸送帶速度曲線
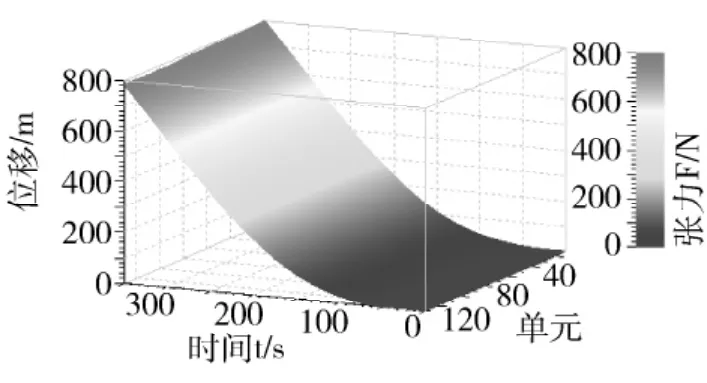
圖6 滿載啟動時時,承載段輸送帶速度曲線
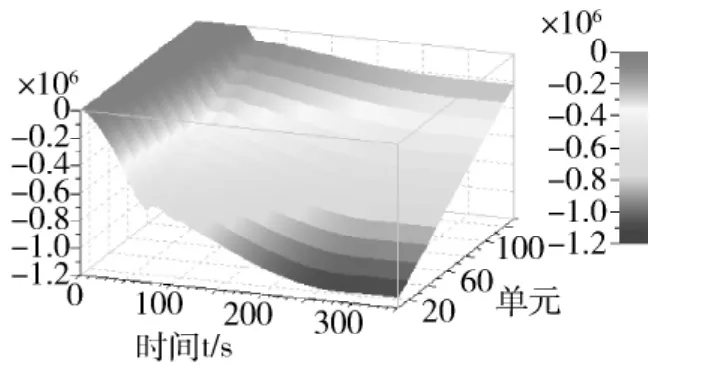
圖7 滿載啟動時,承載段輸送帶張力曲線
3 結語
本文研究了基于AMEsim平臺的帶式輸送機仿真模型建立方法,并運用工程實例驗證了該建模方法的準確性和有效型,得出的仿真結果曲線和帶式輸送機現場測得實際數據近似。可以做為帶式輸送機的動態分析有利依據。
[1]侯友夫,黃民,張永忠.帶式輸送機動態特性及控制技術[M].北京:煤炭工業出版社,2004.
[2]任寧寧,王增才.AT驅動帶式輸送機起動過程仿真研究[J].煤礦機械,2010,31(1):43-45.
[3]李光布.帶式輸送機動力學及其設計[M].北京:機械工業出版社,1998.
[4]李冬梅,程秀芳.帶式輸送機拉緊裝置動態特性分析[J].煤礦機械,2010,31(7):72-74.
[5]楊華,鄭志昊.基于AMEsim帶式輸送機動態特性分析[J].煤礦機電,2008(3):46-51.
[6]李光布,曹椋焱,李儒瓊.大型帶式輸送機動力學建模與仿真研究[J].機械設計與研究,2008,24(4):99-101.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
