基于CarSim的車輛自適應(yīng)巡航仿真與試驗(yàn)研究
2013-09-10 03:19:08李徑亮夏湯忠陸志成劉昭度
汽車科技 2013年2期
李徑亮,夏湯忠,陸志成,劉昭度
(1.神龍汽車有限公司技術(shù)中心,武漢 430056;2.北京理工大學(xué)機(jī)械與車輛學(xué)院,北京 100081)
車輛自適應(yīng)巡航控制系統(tǒng) (Adaptive Cruise Control system,下簡(jiǎn)稱ACC)是一種被廣泛研究且具有廣闊前景的車輛主動(dòng)安全裝置。一般認(rèn)為ACC是一種增強(qiáng)駕乘舒適性的電控裝置,其原理是利用激光/毫米波雷達(dá)、攝像頭等傳感器對(duì)相同車道內(nèi)前方目標(biāo)進(jìn)行檢測(cè),通過(guò)電控系統(tǒng)自主地對(duì)發(fā)動(dòng)機(jī)及制動(dòng)系統(tǒng)的聯(lián)合控制實(shí)現(xiàn)安全車距保持功能[1,2]。ACC有助于緩解駕駛員的駕駛疲勞感,現(xiàn)已經(jīng)越來(lái)越多被應(yīng)用于國(guó)內(nèi)外中高檔轎車上。
在ACC系統(tǒng)開(kāi)發(fā)過(guò)程中,涉及的關(guān)鍵技術(shù)主要包括:①車輛狀態(tài)測(cè)量(輪速、質(zhì)心加速度、橫擺角速度等);②目標(biāo)檢測(cè)與跟蹤(基于雷達(dá)或攝像頭的目標(biāo)檢測(cè)與跟蹤);③ACC核心控制算法的開(kāi)發(fā);④發(fā)動(dòng)機(jī)、制動(dòng)系統(tǒng)的通訊與控制等。利用CAE軟件輔助開(kāi)發(fā)與設(shè)計(jì)能顯著提高ACC裝置開(kāi)發(fā)效率,尤其在ACC核心控制算法開(kāi)發(fā)過(guò)程中,CAE軟件輔助開(kāi)發(fā)具有結(jié)果直觀、開(kāi)發(fā)周期短、成本低廉等顯著優(yōu)勢(shì)。
CarSim是一種專業(yè)的車輛動(dòng)力學(xué)仿真軟件,能準(zhǔn)確模擬車輛對(duì)駕駛員操作行為、空氣動(dòng)力學(xué)以及路面激勵(lì)的響應(yīng)。在車輛操縱穩(wěn)定性、平順性、燃料經(jīng)濟(jì)性、動(dòng)力性等領(lǐng)域有廣泛應(yīng)用[3]。其優(yōu)勢(shì)體現(xiàn)在能方便的模擬各種復(fù)雜路面幾何形式及峰值附著特性、模擬復(fù)雜的駕駛員操作行為和試驗(yàn)工況、通過(guò)簡(jiǎn)單的系統(tǒng)定義輸出復(fù)雜的多剛體機(jī)械結(jié)構(gòu)動(dòng)力學(xué)模型等。其強(qiáng)大的可擴(kuò)展性及豐富的接口使其能方便的與 Matlab/Simulink、dSpace、Labview 等軟件進(jìn)行聯(lián)合仿真,用于各種高級(jí)功能開(kāi)發(fā),尤其在車輛電控系統(tǒng)的開(kāi)發(fā)模擬方面具有顯著優(yōu)勢(shì)。同時(shí)CarSim軟件存在一定局限性,主要體現(xiàn)在:某些部件具有顯著幾何非線性特性及材料非線性特性,需要借FEM方法進(jìn)行剛?cè)狁詈嫌?jì)算才能獲得較理想的計(jì)算值,CarSim在處理此類部件上顯得手段較單一。
結(jié)合現(xiàn)有條件,擬采用CarSim與Simulink聯(lián)合仿真的方式進(jìn)行ACC控制器開(kāi)發(fā),并將成功開(kāi)發(fā)的ACC控制器移植到試驗(yàn)樣車,以完成原理樣機(jī)的試驗(yàn)。其具體開(kāi)發(fā)流程可以描述為:
(1)在CarSim和Simulink環(huán)境下進(jìn)行基于試驗(yàn)的參數(shù)化建模,并完成試驗(yàn)對(duì)標(biāo);
(2)在CarSim與Simulink的集成環(huán)境下進(jìn)行ACC控制器開(kāi)發(fā)調(diào)試;
(3)將ACC控制器移植到樣車嵌入式電控系統(tǒng),并完成實(shí)車試驗(yàn)。
1 基于CarSim和Simulink的建模與試驗(yàn)對(duì)標(biāo)
為了保持CarSim的模型特性與物理樣車的一致性,在建模過(guò)程中需盡可能準(zhǔn)確的模擬物理樣車各部件的特性,試驗(yàn)樣車主要參數(shù)見(jiàn)表1、表2。在CarSim中能便捷地按車輛結(jié)構(gòu)參數(shù)建立模型,同時(shí)也能在模板中建立車輛發(fā)動(dòng)機(jī)、變速箱、轉(zhuǎn)向器等特性;對(duì)于CarSim沒(méi)有專門定義的部件則需要在Simulink中定義,如節(jié)氣門開(kāi)度特性、制動(dòng)輪缸電磁閥特性等[2]。
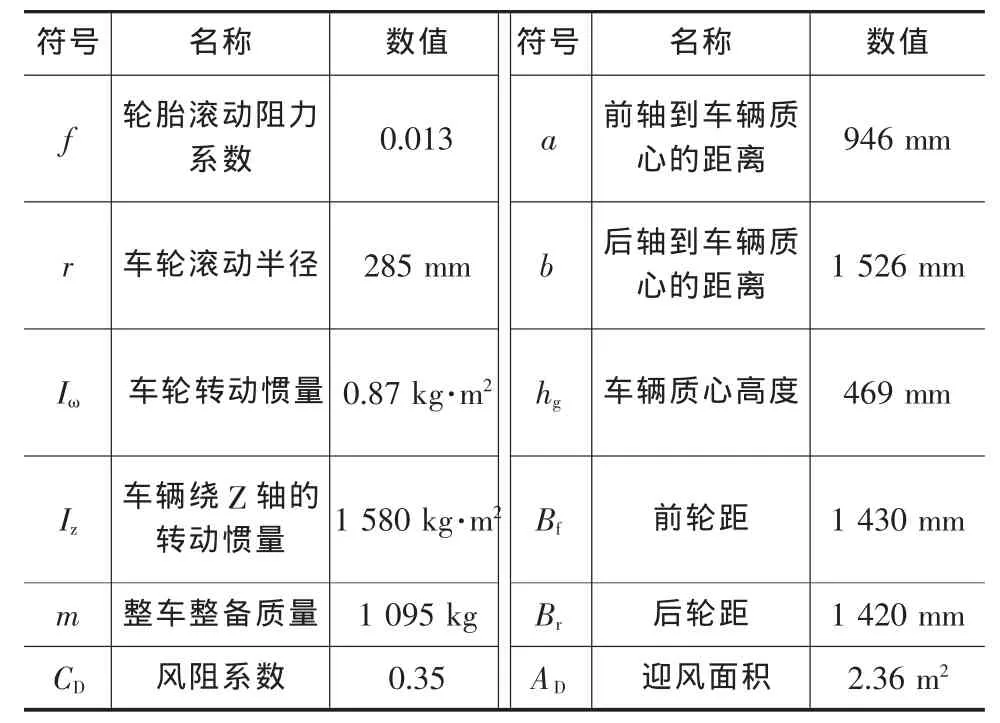
表1 試驗(yàn)樣車主要參數(shù)
試驗(yàn)樣車在CarSim中建立的發(fā)動(dòng)機(jī)特性曲線及動(dòng)力因數(shù)曲線見(jiàn)圖1、圖2。

表2 試驗(yàn)樣車變速箱及主減速器傳動(dòng)比
將已經(jīng)建立好的模型與試驗(yàn)進(jìn)行對(duì)標(biāo)。考慮到ACC工作主要涉及直線加速、滑行、減速等工況,分別利用上述工況的試驗(yàn)數(shù)據(jù)與相同工況下的仿真數(shù)據(jù)進(jìn)行比對(duì),結(jié)果見(jiàn)圖3~圖6。
圖3~圖6中仿真與實(shí)車試驗(yàn)的結(jié)果對(duì)比表明,在加速、制動(dòng)以及滑行狀態(tài)下,CarSim模型均能較精確的反映試驗(yàn)樣車的性能,符合ACC控制器開(kāi)發(fā)要求。
2 ACC控制策略及控制器開(kāi)發(fā)
當(dāng)主車道內(nèi)存在目標(biāo)車輛時(shí),ACC車輛通過(guò)傳感器檢測(cè)前方主車道目標(biāo)的車距與相對(duì)車速,并依據(jù)自身車速計(jì)算出安全車距[4]。ACC車輛通過(guò)控制發(fā)動(dòng)機(jī)節(jié)氣門開(kāi)度與主動(dòng)調(diào)節(jié)制動(dòng)輪缸壓力實(shí)現(xiàn)對(duì)車速的調(diào)節(jié)。本文選取的車輛安全車距為:
式中:ddes為安全車距,m;Vtar為目標(biāo)車輛縱向速度,m/s;Tset為駕駛員設(shè)定的時(shí)間,s;d0為距離變量,m,一般依路面類型選取。
以ddes作為車距控制目標(biāo)設(shè)計(jì)ACC控制器。實(shí)際車距與安全車距偏差如式(2)所示:
式中:ed為實(shí)際車距與安全車距偏差,m;dreal為實(shí)際車距,m;其它參數(shù)意義同上。
定義實(shí)際車距與安全車距偏差變化率為:
車輛ACC控制器結(jié)構(gòu)見(jiàn)圖7。
考慮到控制程序的可移植性,采取模糊控制策略作為 ACC控制手段[5](見(jiàn)圖 8):以實(shí)際車距與安全車距的偏差ed以及偏差變化率作為輸入,并確定車距偏差ed論域?yàn)椋?30 m,30 m],車距偏差變化率論域?yàn)椋?15 m/s,15 m/s]。以車輛期望加速度作為模糊輸出,且期望加速度區(qū)間為論域?yàn)椋?0.6 m/s2,0.6 m/s2]。
利用控制器得到的期望加速度數(shù)據(jù),進(jìn)行發(fā)動(dòng)機(jī)節(jié)氣門控制或制動(dòng)系統(tǒng)主動(dòng)壓力調(diào)節(jié)控制,其方法可以簡(jiǎn)述為:當(dāng)期望加速度高于某一閾值時(shí),采取控制節(jié)氣門開(kāi)度的方式進(jìn)行速度調(diào)控;當(dāng)期望加速度處于某兩閾值之間時(shí),通過(guò)使發(fā)動(dòng)機(jī)保持怠速開(kāi)度進(jìn)行控制;當(dāng)期望加速度低于某一閾值時(shí),保持發(fā)動(dòng)機(jī)怠速開(kāi)度,同時(shí)對(duì)制動(dòng)系統(tǒng)進(jìn)行主動(dòng)壓力調(diào)節(jié),使制動(dòng)器輪缸內(nèi)產(chǎn)生一定壓力,以實(shí)現(xiàn)減速控制[2~6]。
3 ACC控制仿真結(jié)果及初步實(shí)車試驗(yàn)結(jié)果
利用上一節(jié)開(kāi)發(fā)的ACC控制器進(jìn)行CarSim/Simulink聯(lián)合仿真,仿真工況描述如下:ACC車輛以90 km/h的初始速度在良好附著平直路面行駛,雷達(dá)檢測(cè)到主車道正前方60 m處存在車速約80 km/h的目標(biāo)車輛。在CarSim中設(shè)置目標(biāo)車輛為4×2后驅(qū)GT車,其發(fā)動(dòng)機(jī)功率300 kW。由于初始車距大于安全車距,且ACC車輛速度略高于目標(biāo)車輛速度,控制器調(diào)節(jié)發(fā)動(dòng)機(jī)節(jié)氣門首先使實(shí)際車距與安全車距接近,同時(shí)使ACC車輛車速與目標(biāo)車輛車速一致。此后車輛進(jìn)入穩(wěn)定的ACC控制,保持相對(duì)車距在安全車距附近,同時(shí)保持ACC車輛車速與目標(biāo)車速基本相同。圖9與圖10對(duì)比結(jié)果顯示,ACC仿真控制器控制效果良好。
將ACC模糊控制器移植入自主研發(fā)的ACC電控系統(tǒng)并進(jìn)行ACC實(shí)車試驗(yàn),初步試驗(yàn)結(jié)果如圖11與圖12所示。試驗(yàn)中利用Delphi ESR毫米波雷達(dá)檢測(cè)目標(biāo)車輛與ACC主車的相對(duì)速度、相對(duì)距離及方位角,并依據(jù)自主開(kāi)發(fā)的目標(biāo)識(shí)別及跟蹤算法對(duì)目標(biāo)車輛實(shí)施跟蹤[2]。ACC控制器根據(jù)實(shí)測(cè)計(jì)算得到的相對(duì)距離變化率及相對(duì)速度變化率利用從仿真控制器中移植得到的控制算法進(jìn)行期望加速度計(jì)算,并利用電子節(jié)氣門開(kāi)度控制和制動(dòng)輪缸主動(dòng)建壓及壓力調(diào)節(jié)技術(shù)分別實(shí)現(xiàn)車輛的加速及減速控制。
實(shí)車試驗(yàn)結(jié)果表明:
(1)ACC車輛能準(zhǔn)確檢測(cè)并跟蹤車道內(nèi)目標(biāo);
(2)ACC車輛能依據(jù)目標(biāo)車輛運(yùn)動(dòng)變化自主地實(shí)現(xiàn)車速調(diào)節(jié)并保持安全車距;
(3)現(xiàn)有算法并不完善,在目標(biāo)車輛出現(xiàn)急加速或急減速時(shí)控制器存在一定程度的滯后與超調(diào),需要進(jìn)一步完善。
4 結(jié)論
本文利用CarSim/Simulink聯(lián)合仿真的方法建立了某試驗(yàn)樣車的車輛動(dòng)力學(xué)仿真模型并通過(guò)試驗(yàn)對(duì)標(biāo)驗(yàn)證了模型與樣車的一致性;基于仿真模型在聯(lián)合仿真環(huán)境下設(shè)計(jì)并開(kāi)發(fā)了ACC控制器并進(jìn)行了車輛自適應(yīng)巡航仿真試驗(yàn);將仿真控制器移植到自主研發(fā)的車輛ACC電控系統(tǒng)并進(jìn)行實(shí)車試驗(yàn)并實(shí)現(xiàn)了基本功能。
[1]Xiao Lingyun,Gao Feng.A comprehensive review of the development of adaptive cruise control systems[J].Vehicle System Dynamics, 2010,48(10):1167-1192.
[2]李徑亮.車輛 ABS/ASR/ACC 集成技術(shù)研究[D].北京:北京理工大學(xué),2012.
[3]吳利軍,劉昭度,何瑋.汽車ACC跟隨控制策略研究[J].汽車工程, 2005,27(5):514-515.
[4]Daniele Corona and Bart De Schutter.Adaptive Cruise Control for a SMART Car:A Comparison Benchmark for MPC-PWA Control Methods [J].IEEE Transactions on Control Systems Technology,2008,16(2).
[5]Li Jingliang,Liu Zhaodu.Design of ACC controller based on double level mamdani reasoning [J].Proceedings of the 2009 WRI Global Congress on Intelligent Systems,GCIS 2009,2009,2:233-237.
[6]馬岳峰,劉昭度,吳利軍,等.基于ABS的ABS/ASR集成液壓系統(tǒng)設(shè)計(jì)[J].液壓與氣動(dòng),2004(6): 27-29.
[7]李徑亮,劉昭度.基于MCU的車輛ACC電控系統(tǒng)設(shè)計(jì)[J].微計(jì)算機(jī)信息,2009,25(10-2):1-3.