基于退偏效應(yīng)的尾流激光探測與尋跡方法
2013-09-19 05:54:18晶1航1王培南2
水下無人系統(tǒng)學(xué)報 2013年6期
田 晶1, 陳 航1, 王培南2
?
基于退偏效應(yīng)的尾流激光探測與尋跡方法
田 晶, 陳 航, 王培南
(1. 西北工業(yè)大學(xué)航海學(xué)院, 陜西西安, 710072; 2. 西安電子科技大學(xué)技術(shù)物理學(xué)院, 陜西西安, 710071)
利用不同尺度氣泡與海水介質(zhì)對激光散射后退偏狀態(tài)的差異性進(jìn)行尾流檢測并實(shí)現(xiàn)尾流尋跡。仿效聲尾流導(dǎo)引的模式, 通過尾流中不同密度、尺寸氣泡群與海水水體的分辨達(dá)到對尾流邊緣區(qū)域的識別。試驗(yàn)結(jié)果表明, 本文的方法能夠有層次地分辨不同密度、尺度氣泡散射體和海水介質(zhì)的回波信號, 并反映出氣泡密度對散射光退偏效應(yīng)的敏感性。試驗(yàn)結(jié)果具有一定的規(guī)律性, 表明該方法可以實(shí)現(xiàn)探測器對進(jìn)出尾流的甄別。
尾流; 退偏效應(yīng); 激光探測; 尋跡
0 引言
當(dāng)今尾流制導(dǎo)已成為現(xiàn)代反艦的重要方法, 其中如何提高尾流檢測靈敏度, 優(yōu)化尾流導(dǎo)引彈道已成為提高尾流制導(dǎo)性能的關(guān)鍵技術(shù)。尾流信號檢測靈敏度越高, 魚雷在更遠(yuǎn)的距離上捕獲到和跟蹤上目標(biāo)艦船尾流從而發(fā)現(xiàn)目標(biāo)的概率就越高。近年來, 激光尾流探測技術(shù)由于其檢測靈敏度高, 穩(wěn)定性好, 以及較強(qiáng)的反隱身能力被越來越重視。傳統(tǒng)的基于光散射強(qiáng)度進(jìn)行尾流探測的方法, 如距離選通法、窄帶濾波法等, 由于易受到環(huán)境背景光和水體散射的干擾, 對進(jìn)一步提高尾流探測的靈敏度和可靠性產(chǎn)生了一定的影響。而一種基于散射光退偏效應(yīng)的尾流激光探測方式, 由于在傳統(tǒng)強(qiáng)度探測方式的基礎(chǔ)上增加了偏振信息量, 能夠有效區(qū)分海水散射光以及環(huán)境背光對探測信號的干擾, 可獲得更高的尾流探測精度。目前, 這種方法的效果已在實(shí)驗(yàn)室條件下得到了證實(shí), 并得到了學(xué)術(shù)界的肯定。
遠(yuǎn)距離尾流中的氣泡密度低, 主要是150 μm以下的小尺度氣泡群, 在這種條件下的尾流聲探測非常困難, 而基于光散射強(qiáng)度的尾流探測方法又因受到水體自身散射的嚴(yán)重干擾而不能很好辨識尾流舷別信息的難題。利用退偏效應(yīng)的尾流激光探測方法能夠在一定程度上解決上述問題。有關(guān)小尺度、低密度氣泡群的探測已在相關(guān)文獻(xiàn)中闡述, 本文著重分析退偏效應(yīng)的尾流激光尋跡方法, 通過尾流中不同密度氣泡群、海水水體的分辨達(dá)到對尾流邊緣區(qū)域的識別。
1 尾流激光探測模型
1.1 尾流模型
尾流通常被認(rèn)為是從艦船尾端開始成錐形擴(kuò)散分布的, 在艦尾初的寬度約為艦寬的一半。在最初一段距離內(nèi)錐形擴(kuò)散角在30~60之間, 艦船類型對該角度的影響較小。尾流擴(kuò)散超過到一定距離時, 該擴(kuò)散角急劇減小, 一般可認(rèn)為擴(kuò)散角以1的角度向外擴(kuò)展, 此時的寬度約為艦艇寬度的2.5倍; 超過L距離后以確定速度向兩邊擴(kuò)散; 當(dāng)繼續(xù)擴(kuò)散較長一段時間后只有小氣泡在尾流中存活數(shù)小時形成遠(yuǎn)距離尾流, 尾流邊緣已經(jīng)較難辨識。圖1為近距離尾流幾何模型頂視圖和側(cè)視圖, 圖中為有效尾流長度,H為尾流最大厚度,h為艦船吃水深度。
1.2 激光探測器布置方式
可以在雷體剖面上布置3個探測器同時進(jìn)行尾流氣泡的探測, 利用氣泡密度對散射光退偏效應(yīng)的敏感性, 判斷雷體是否處于尾流邊緣, 從而進(jìn)行彈道調(diào)整。圖2(a)所示為探測器在魚雷頭部的布置示意圖, 在雷體剖面的左、中、右方各設(shè)置一組激光探測器, 激光器放在如圖2(a)3個方向上, 左右2個探測器的光學(xué)軸線相對于垂直向上的軸線保持一定的角度, 形成指向3個方向的檢測通道。
(a) 探測器的布置方式
(b) 光尾流探測方式
圖2 尾流探測模型
Fig. 2 Schematic of wake detection model
當(dāng)探測器進(jìn)入尾流并處于尾流區(qū)的下方時, 左右2個探測器以及中間探測器皆能接收到尾流信號, 當(dāng)魚雷左入尾流時, 則左面的基陣首先檢測到回波信號; 當(dāng)魚雷右入尾流時, 則右面的基陣首先檢測到回波信號; 當(dāng)魚雷位于尾流中時則3個基陣,,都能檢測到尾流信號; 當(dāng)魚雷位于尾流中心時, 則中間基陣接收到的信號強(qiáng)度最大, 兩邊基陣,接收到的信號近似相等; 當(dāng)魚雷位于近距離尾流區(qū)域中心時,這種判別方法依舊適用, 并且兩邊基陣接收到的信號也近似相等, 但是與中間基陣接收到的信號與兩邊基陣接收到的信號強(qiáng)度差距減小。
2 試驗(yàn)及結(jié)果分析
為證明本激光探測器布陣方式的可行性, 進(jìn)行了試驗(yàn)平臺搭建, 圖3是模擬尾流氣泡群激光散射強(qiáng)度和退偏探測試驗(yàn)系統(tǒng)平臺。系統(tǒng)光源為脈沖激光器(波長532 nm)輸出某一方向占優(yōu)勢的線偏振激光, 功率約10 mW。氣泡尺度根據(jù)需要利用氣泡發(fā)生器可控制在10~150mm(模擬遠(yuǎn)距離尾流特征, 遠(yuǎn)距離尾流主要由小氣泡組成)以及主要?dú)馀莩叨葹榇笥?50mm(模擬近距離尾流特征)的氣泡群。在接收信號位置放上測偏裝置, 主要接收散射后回波信號的偏振光, 激光通過水槽時, 其中一部分激光會被水體和氣泡幕反射回來, 試驗(yàn)令激光檢測裝置距氣泡發(fā)生器的中心距離分別為=11 cm,=38 cm,=58 cm, 每次激光在這些位置探測時以相同的接收偏振狀態(tài)進(jìn)行接收等, 目的是在入射光強(qiáng)及氣泡發(fā)生器氣壓相同的條件下對距尾流中心不同位置(不同密度)的氣泡群尾流進(jìn)行識別。
試驗(yàn)共分3組, 在入射光強(qiáng)相同, 距氣泡發(fā)生器中心位置不同等前提下, 試驗(yàn)1測量了激光通過微小氣泡水域(氣泡尺度10~150mm)的散射光在同一偏振態(tài)下散射強(qiáng)度(見圖4); 試驗(yàn)2測量了激光通過大氣泡氣群(氣泡尺度>150mm)的散射光在同一偏振態(tài)下散射強(qiáng)度(見圖5); 試驗(yàn)3測量了激光通過近距離尾流、遠(yuǎn)距離尾流散射后接收的某偏振光分量(見圖6)。每一組試驗(yàn)都與各自相同條件下的靜水散射光偏振分量進(jìn)行對比, 從而確定是否可以成功區(qū)分目標(biāo)信號與水體散射信號, 驗(yàn)證此種布陣方法的可行性。
1) 由圖4可知, 對于遠(yuǎn)距離尾流(微小氣泡群10~150mm)入射激光越靠近尾流氣泡群中心,其發(fā)射激光對應(yīng)的接收基陣所接收到的偏振分量光強(qiáng)越強(qiáng), 距尾流氣泡群中心越遠(yuǎn)(如為38 cm, 58 cm時), 偏振激光強(qiáng)度越弱。
2) 由圖5可知, 對于近距離尾流(主要大氣泡)入射激光越靠近尾流中心, 對應(yīng)基陣接收到的偏振分量光強(qiáng)越強(qiáng), 距尾流中心越遠(yuǎn)(如為38 cm, 58cm), 接收到的激光強(qiáng)度越弱, 光強(qiáng)遞減幅度較微小氣泡群(10~150mm)強(qiáng)。
3) 由圖6可知, 對于大氣泡尾流以及微小氣泡尾流在距離尾流中心相同位置如11cm時, 在同一接收狀態(tài)下, 接收到的某方向偏振光強(qiáng)有所不同, 大氣泡光強(qiáng)較強(qiáng), 小氣泡光強(qiáng)較弱。
4) 每一組試驗(yàn)結(jié)果都與各自相同條件下靜水偏振分量散射強(qiáng)度做了對比, 從圖4~圖6中所標(biāo)注的靜水曲線信號可見, 靜水條件下水體回波信號強(qiáng)度在這種測試方法下總是最弱, 與有尾流(氣泡)的水域退偏回波信號強(qiáng)度差別較大。
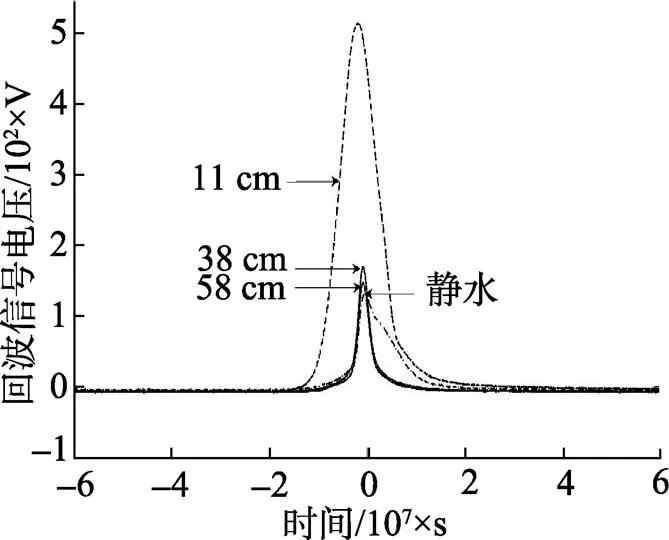
圖5通過大氣泡氣群的散射光在同一偏振態(tài)下散射強(qiáng)度
綜上分析可知, 試驗(yàn)驗(yàn)證了本設(shè)計的可行性, 由于尾流氣泡群中心氣泡密度較大, 尾流邊緣密度較小呈正態(tài)分布, 因此, 試驗(yàn)室模擬了真實(shí)尾流的分布狀況, 并在不同密度氣泡的位置(11 cm, 38 cm, 58 cm)分別放置了相同入射光強(qiáng)的激光器和相同型號的探測器, 在相同入射光強(qiáng)下測得不同位置、不同大小氣泡群所得到的激光散射后在同一偏振態(tài)下偏振分量強(qiáng)度不同, 具有明顯的規(guī)律性, 顯示無氣泡(靜水)條件下回波信號強(qiáng)度最弱。試驗(yàn)驗(yàn)證了本方法的可行性。
3 結(jié)束語
本文在采用偏振光探測尾流研究的基礎(chǔ)上提出了一種基于退偏效應(yīng)的尾流激光探測與尋跡方法, 在某個接收的偏振狀態(tài)下, 可以清晰的區(qū)別尾流的舷別信息, 利用這一信息可以對魚雷激光尾流自導(dǎo)的尋跡和跟蹤彈道進(jìn)行優(yōu)化, 從而有效降低水體自身散射干擾。試驗(yàn)證明, 該方法既能檢測遠(yuǎn)距離尾流又能檢測近距離尾流, 解決了聲探測方法對遠(yuǎn)距離尾流檢測困難的難題, 又克服了傳統(tǒng)光尾流探測受水體自身散射等干擾嚴(yán)重的情況。可以看出,艦船尾流退偏探測與尋跡具有良好的應(yīng)用前景, 將大大提高艦船尾流的探測距離和導(dǎo)引精度。
[1] Fournier G R, Bonnier D, Forand J L, et a1.Range-gated Underwater Laser Imaging System[J]. Optical Engineering, 1993, 32(9): 2185-2190.
[2] 劉繼芳, 雷衛(wèi)寧, 冀邦杰. 光檢測尾流特征中抑制背景干擾的方法[J]. 魚雷技術(shù), 2007, 15(2): 25-27. Liu Ji-fang, Lei Wei-ning, Ji Bang-jie .Restraint Method of Background Interference for Detection of Light Wakes [J]. Torpedo Technology, 2007, 15(2): 25-27.
[3] Tian Jing, Chen Hang, Qu Xiao-xi. Study on Far-Field Scatter of Ship Wake for Micro-Bubbles Based on CST[C] //Applied Mechanics and Materials. Switzerland: Trans Tech Publications, 2012: 226-228, 2042-2045.
[4] 田晶, 陳航, 許望洋. 艦船尾流微氣泡光偏振特性分析[J]. 西北工業(yè)大學(xué)學(xué)報, 2013, 31(1): 129-132. Tian Jing, Chen Hang, Xu Wang-yang. Some Useful Results for Detecting Ship Wake Obtained from Depolarization of Light Scattered from Mcro-Bubbles[J]. Journal of Northwestern Polytechnical University, 2013, 31(1): 129- 132.
[5] 陳航, 田晶, 戚茜. 一種基于退偏效應(yīng)的激光尾流信號檢測方法[J]. 光電子×激光, 2013, 24(8): 1563-1568.
Chen Hang, Tian Jing, Qi Qian. A Detection Method on Laser Ship Wake Guidance Signal Based on Depolarization[J]. Journal of Optoelectronics Laser, 2013, 24(8): 1563-1568.
[6] 孫春生, 張曉暉, 朱東華. 氣泡數(shù)密度對尾流光束衰減測量的影響[J]. 光子學(xué)報, 2009, 38(6): 1515-1517. Sun Chun-sheng, Zhang Xiao-hui, Zhu Dong-hua. Influence of Bubbles Number Density on Measurement of Beam Attenuation in Ship Wakes[J]. Acta Photonica Si- nica, 2009, 38(6): 1515-1517.
[7] Gimmestad G G. Reexamination of Depolarization in Lidar Measurements[J]. Appled Optics, 2008, 47(21): 3795- 3798.
[8] 張字文. 魚雷彈道與彈道設(shè)計[M]. 西安: 西北工業(yè)大學(xué)出版社, 1999: 382-399.
[9] 李騰龍, 何俊華, 謝正茂,等. 尾流氣泡參數(shù)測量系統(tǒng)的光學(xué)設(shè)計[J]. 紅外與激光工程, 2012, 41(9): 2469- 2471. Li Teng-long, He Jun-hua, Xie Zheng-mao, et al. Optical Design of Wake Bubbles Measurement System[J]. Infrared and Laser Engineering, 2012, 41(9): 2469-2471.
[10] 朱東華, 張曉暉, 顧建農(nóng). 艦船尾流及其氣泡數(shù)密度分布的數(shù)值計算[J], 2011, 32(3): 316-318.Zhu Dong-hua, Zhang Xiao-hui, Gu Jian-nong.merical Calculation of Ship Wake and Its Bubble Number Density Distribution[J]. 2011, 32(3): 316-318.
(責(zé)任編輯: 楊力軍)
Tracing and Laser Detecting Ship Wake Based on Depolarization Effect
TIAN Jing, CHEN Hang, WANG Pei-nan
(1. College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710072, China; 2. School of Technical Physics, Xidian University, Xi′an 710071, China)
The purpose of this paper is to find a method for accurately detecting and tracing ship wake by making use of the difference of depolarization states due to laser scattering of bubbles with different scale and seawater. Imitating acoustic wake guidance mode, ship wake edge region is recognized through identification of the bubbles with different density and scale from sea water. Experiment results show that this method clearly distinguishes these echo signals, and displays the sensitiveness of bubble density to depolarization effect of scattered light. These results show certain regularity, which infers that this method can be used to accurately and clearly distinguish ship wake.
ship wake; depolarization effect; laser detection; tracing
TJ630.34; TN247
A
1673-1948(2013)06-0414-04
2013-04-10;
2013-05-23.
西北工業(yè)大學(xué)研究生創(chuàng)業(yè)種子基金(Z2012002).
田 晶(1986-), 女, 在讀博士, 研究方向?yàn)楣馕擦鲗?dǎo)航與制導(dǎo)技術(shù)研究.
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
