水下目標融合識別技術研究現狀與展望
2013-09-19 03:14:04夏慶升1劉義海2
水下無人系統學報 2013年3期
夏慶升1, 劉義海2
?
水下目標融合識別技術研究現狀與展望
夏慶升, 劉義海
(1. 海裝重慶局, 重慶, 401120; 2. 西北工業大學航海學院, 陜西西安, 710072)
回顧了近年來國內外關于信息融合功能模型結構的研究現狀, 針對水下目標融合識別系統重點分析了具有數據、特征和決策3個融合層次的目標融合識別模型, 給出了各融合層次幾種常用的典型算法, 即基于概率理論、數據分類理論以及人工智能理論的算法, 分析了各種算法的優缺點和應用約束。最后對水下基于多傳感器的目標融合識別系統的發展動向、存在的問題和解決這些問題的思路進行了展望。
目標識別; 信息融合; 多傳感器系統; 融合算法
0 引言
多傳感器信息融合識別系統(target fusion recognition system, TFRS)可以充分利用與系統功能關聯的多個傳感器資源, 將多傳感器關于目標屬性的描述性數據進行融合推理, 并獲得比任一單傳感器更具體、更精確的目標識別內涵, 得到各行業領域的廣泛研究和應用。融合識別技術可以獲得的優勢包括: 增強系統的環境適應性, 提高決策的自適應性和魯棒性; 某個或某幾個傳感器失效或測不準時, 可以采取剔除的方式, 保持系統仍能正常運行, 提高系統的可靠性; 可以發揮各自的優點, 取長補短, 提高獲取信息的準確性和全面性, 降低信息的不確定性和測量范圍的局限性等。
現有的水下裝備識別系統大多數是利用艦船物理場信息, 通過掛載的針對該物理場信息的傳感系統獲得目標特征信息, 完成目標識別。然而, 實際情況是, 海洋中存在的不同艦船物理場信號受各種因素的影響, 呈現一定的不穩定性, 表現為觀測物理場信號受海洋信道的時-空-頻變動態性、非線性和非高斯性, 混響以及環境噪聲等干擾和多徑效應。另外, 系統所搭載的各種傳感器自身只能感知目標信息的一部分特性, 加上海戰中雙方采取的多種電子對抗技術, 導致傳感器在感知過程中存在不確定因素, 系統獲取數據不精確、不完整和不可靠。上述諸種因素會導致僅靠單一傳感器的水下目標識別系統因識別率低、魯棒性差、可靠性不高而不能滿足新形勢下海戰目標識別的要求。因此, 將上述的具有眾多性能優點的信息融合技術應用于水下裝備的自動目標識別系統, 以期獲得更優的決策結果就自然提到日程上來。
當前, 對于水中智能裝備系統的目標融合識別問題的研究主要有美國的Naval Research Laboratory、Sona Lyst incorporated, 法國的Alcatel、Thompson-CSF, 德國的FGAN、Humbolt University, 以及英國、瑞士、荷蘭等國家的相關研究機構。我國的許多大學和研究所的專家也開始從事這方面的研究, 但基本上還處于跟蹤國外階段, 主要集中在以下幾點: 水下不確定性信息的匯集、配準和關聯, 水下信息融合結構和層次的定義優化, 信息融合算法有效性、魯棒性、自適應性以及融合性能的評價等各個方面。本文基于作者近期的科研工作, 結合國內外最新研究現狀, 試圖給出水下裝備的融合目標識別技術在融合識別模型結構和融合算法的一個統一研究框架, 并初步分析各信息融合層次及各種融合算法優勢和應用約束, 并對目標融合識別存在的問題給出自己的一些意見和建議。
1 水下目標融合識別的模型結構
信息融合的模型設計是從融合過程出發描述信息融合包括的主要功能、數據庫, 以及信息融合系統各組成部分之間相互作用的過程, 是融合任務的概念式表述。目前, 很多學者從不同的角度提出了融合系統的一般功能模型, 較為典型的有Gainey和Blasch的PEMS回路模型, 美國JDL組的JDL模型, Bedworth的Omnibus模型(OODA環)以及Dasarathy的3級融合模型等。從處理過程上看, 可以概括地認為信息融合是一個從數據、特征到決策, 由底層到高層的多源信息處理、交互及融合過程, 然而, 針對不同的應用場景和任務, 融合的偏重點又存在差別。
針對水下目標探測和識別任務, 將信息融合技術擴展為“數據—特征—識別”這一最為常見的目標分類處理過程, 并擴展傳感器優化管理、環境信息評價等模塊(如: 智能融合模型等), 得到基于多傳感器與多信源的水下目標融合分類模型。圖1給出了基于多傳感器融合識別的一般功能模型。
從圖中可以看出, 水下目標融合識別的模型結構按信息抽象的程度被分為3個融合級別: 數據級融合、特征級融合、決策級融合。數據級融合通常用于裝備平臺內部對來自同等量級、同質傳感器的原始數據進行融合, 例如對多個分布式聲、磁、水壓傳感器獲取的艦船同類型物理場數據的融合, 以獲取較高的接收信號信噪比。在進行數據級融合時, 通常采用基于統計估值理論的算法, 包含非遞歸類和遞歸迭代類2種。非遞歸類算法常見的有加權平均算法和最小均方估值算法等, 遞歸迭代類算法常見的有卡爾曼濾波算法和擴展的卡爾曼濾波算法。另外, 對于成像聲納等多傳感器的數據類融合, 主元分析法、小波分頻帶融合法等新算法也被廣泛采用。對于水下裝備平臺的融合識別系統而言, 數據級融合可以保持盡可能多的艦船物理場數據的細微信息, 是一種最優的融合識別。然而, 數據級融合方法存在的局限性也是十分明顯的, 其處理的傳感器數據量太大, 對于裝備平臺的數字處理器要求較高; 對傳感器網絡而言數據通信量很大, 而實際情況是水下通信能力有限。這些對于水下目標的融合識別系統來說都是比較難滿足的。特征級融合屬于中間層次的融合, 各傳感器觀測一個目標并完成特征提取(如: 聲傳感器從艦船聲場信號提取艦船噪聲的功率譜、聲壓級、通過特性譜等聲場特征, 電場傳感器從艦船電場信息獲取的艦船的基頻、場強變化率等電場特征量), 然后再對這些特征向量進行綜合分析和處理, 并基于所獲得的融合特征向量來產生對目標身份的估計。通常, 特征級的融合分為各傳感器特征集的統一化和標準化處理, 特征壓縮、拼接, 以及特征匹配等。在特征級融合時, 通常采用基于數據分類處理理論的算法, 包含基于支持向量機的特征分類方法、聚類分析類方法、K-均值分類、Kohonen特征自組織算法、學習向量量化(learning vector quantization, LVQ)算法等。對于融合識別系統而言, 特征級融合的優點在于實現了客觀的信息壓縮, 減輕了平臺內中央單元的負擔, 并且在融合的結構模型上一般多采用分散式的融合結構, 而且可以采用有效的電源管理方案達到節省電能的作用。但由于其損失了一部分有用信息, 使得融合性能有所降低, 對于要求高識別率的自主目標識別系統來說并不是理想選擇。決策級融合要求每個傳感器都是一個獨立的數據處理單元(專家系統), 并完成對采集信息的變換以便獲得其對目標的獨立身份估計, 融合中心對來自每個傳感器的屬性分類進行融合得到最終決策。在決策層常采用的融合算法有Bayes推斷、專家系統、D-S證據推理、模糊集理論等。決策級融合數據損失量最大, 因而相對來說精度最低, 但其具有通信量小, 抗干擾能力強, 對傳感器依賴小, 融合中心處理代價低等優點, 而這些優點又都是水聲網絡里急切需要的。表1給出了上述3級融合處理結構各自的優缺點對比。
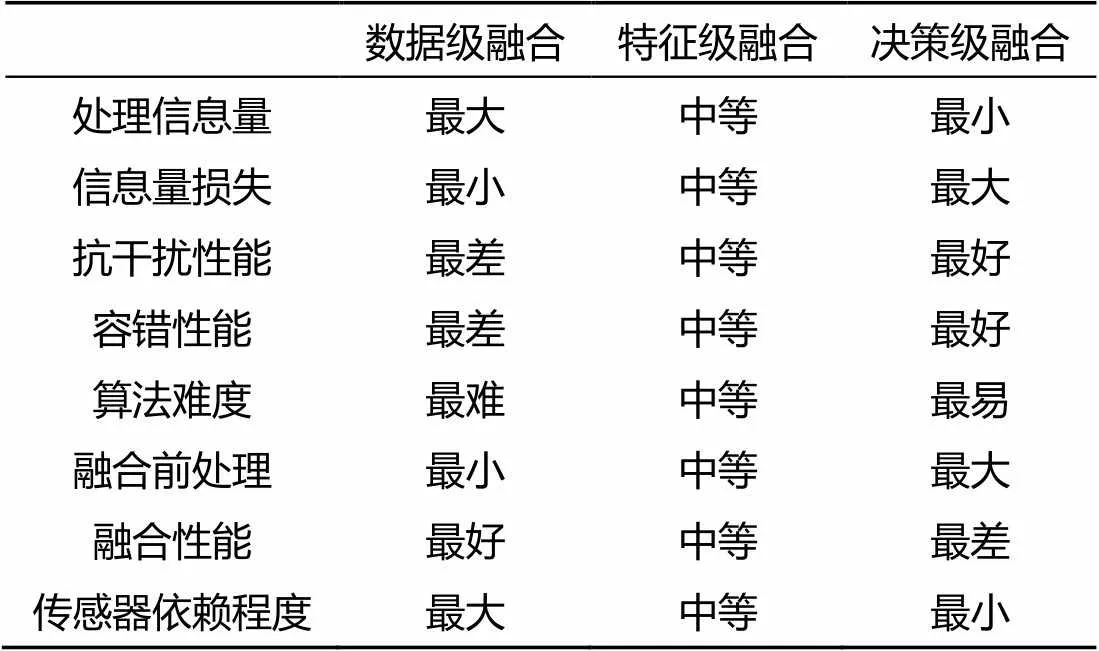
表1 融合層次及優缺點對比
從上述分析可得, 利用水下艦船目標多源物理場信息的融合目標識別平臺, 包含3級結構(數據級、特征級、決策級)的融合識別功能模型應該是開放的。該功能模型應該結合實際應用背景、任務的不同, 系統硬件配置的不同, 以及相應融合層次的優缺點來選擇系統重點傾向的融合層級, 舍棄對系統代價過高的融合層級, 進而得到一個面向實際情況的實用性融合功能結構模型。
2 信息融合的幾種典型算法
確定的融合系統功能模型還需要在各融合層次中選擇合適的融合算法, 才能獲取最優的融合結果。信息融合算法將所有的輸入數據在一個公共空間內得以有效描述, 同時對這些數據進行適當的綜合, 最后以適當的形式輸出和表現。算法的選擇和研究不取決于信息融合的任務和結果, 而是取決于要融合信息的形式即信息流。多傳感器信息融合算法通常源于對概率理論、數據分類理論以及人工智能理論的拓展。
2.1 基于概率估值理論的融合方法
常用的與概率估值有關的方法有卡爾曼濾波, 貝葉斯方法, 統計決策理論等。
1) 卡爾曼濾波法
該算法假定系統可以用一個線性模型描述, 且系統噪聲與傳感器測量噪聲均符合高斯分布的白噪聲模型, 則卡爾曼濾波將為融合數據提供統計意義下的最優估計。卡爾曼濾波對多傳感器的觀測進行融合處理, 既可以獲得當前狀態的估計, 又可以預報系統未來的狀態。卡爾曼濾波方法是一種建立在估計目標模型基礎上的融合方法。
2) Bayes算法
該算法應用于目標屬性融合的基本原理: 給定某假設的先驗似然估計, 隨著觀測數據的到來, Bayes方法可以更新該假設的似然函數。Bayes多傳感器融合推理基于Bayes 理論, 首先假定各傳感器為Bayes估計器, 將各個單獨物體的關聯概率分布合成一個聯合的后驗概率分布函數, 最后通過選擇具有最大聯合后驗概率的決策提供多傳感器信息的最終融合值。然而, Bayes推理存在一些缺點: 定義先驗概率函數非常困難, 定義決策函數閾值的主觀性太強, 且當有多個可能的假設和多個條件相關時, 算法計算量較大。
圖2給出了基于Bayes理論的水下艦船多傳感器信息融合識別算法示意圖。
3) 統計決策理論
該算法主要面向水聲傳感器網絡對目標的檢測識別問題, 在已知各本地聲傳感器檢測和虛警概率時, 融合中心節點所能獲取的融合各本地決策的最優方法是似然比檢驗(likelihood ratio test, LRT)。基于分布式統計理論的計數規則檢驗(counting rule test, CRT)方法是上述方法在實際應用中檢測和虛警概率難獲得情況下的一種拓展。該方法對各個本地傳感器符合二項式分布的決策結果進行等權值求和, 不需要各傳感器探測概率和虛警概率, 理論上CRT的融合結果近似LRT方法, 是一種次最優的方法。然而, 當局部傳感器所處環境惡劣, 且艦船目標輻射噪聲覆蓋區域有限時, CRT方法會因接收全局虛警而導致效果迅速下滑。掃描統計檢驗(scan statistic test, SST)方法通過在傳感器網絡覆蓋的區域將區域離散化處理, 然后在各個離散區域內繼續采用CRT準則, 融合中心對各離散域內的報告結果進行基于CRT的二次融合, 試驗結果表明, 當該離散區域窗近似和目標輻射噪聲信號的區域匹配時, 該方法可以克服CRT準則受虛警概率嚴重影響的缺陷, 是分布式統計決策理論的最新算法。
2.2 基于不精確推理類方法
基于不精確推理類融合的典型算法有: D-S證據理論、模糊邏輯和人工神經網絡。
1) D-S證據理論
D-S證據理論基于2個最基本的思想: ①識別框架的劃分及對應的信任程度分配; ②D-S融合規則融合各傳感器關于框架元素信度分配值, 獲得融合后對目標信度的重新分配。目前對D-S證據理論的討論主要集中在以下幾個問題: ① D-S證據理論往往不適用于處理高度沖突的證據, 會得出有悖于常理的結論。②針對含有不等可信度信息的證據, 一般先采用折扣處理的D-S規則, 問題是: a.折扣規則將折扣的信度分配給全集, 增加了不確定性, 不利于決策; b.證據的可信度和權威性是2個不同的概念, 如果考慮證據的重要性或權威性等這類相對度量指標, 打折扣的辦法將不再適用。③沖突管理問題。沖突產生的原因可概括為兩大類型: 一是辨識框架不完備, 即有新的元素出現; 二是證據或傳感器未能正確反映觀測目標, 例如: a.由于傳感器的時變效應、環境變化或者敵方干擾, 導致輸出信息不穩定、不可靠; b.證據源的辨識能力有限。④先驗信息存在時, 如何將不同種類的先驗信息融入到推理和決策框架, 從而真正實現多源異類異構信息的融合, 也是框架建模時需要考慮的問題。
2) 模糊推理理論
模糊概念由美國控制論專家Zadeh教授于1965年提出, 用于表示某一事件“似乎屬于”的程度。基于模糊理論而首先發展起來的一種融合識別方法是決策模板法。該方法用訓練樣本關于同類目標決策分布圖的平均值作為該類目標的決策模板, 將決策模板和樣本的決策分布圖看作模糊子集。對一待識別樣本, 融合識別就是計算其決策分布圖與各類目標決策模板之間的相似度, 將其判為相似度(或包含級)最大的那個類別。另外, 基于模糊理論發展起來的模糊聚類分析算法常用于實現特征層融合的最優特征選擇。
3) 人工神經網絡
該算法根據當前系統所接收到樣本的相似性, 動態改變網絡權值分布, 同時可采用神經網絡特定的學習算法來獲取知識, 確定目標的分類標準。神經網絡多傳感器信息融合的實現分3個重要步驟: ①根據智能系統要求及傳感器信息融合的形式, 選擇其拓撲結構; ②各傳感器的輸入信息綜合處理為一總體輸入函數, 并將此函數映射定義為相關單元的映射函數, 通過神經網絡與環境的交互作用把環境的統計規律反映到網絡本身結構; ③對傳感器輸出信息進行學習、理解, 確定權值的分配, 完成知識獲取信息融合, 進而對輸入模式做出解釋, 將輸入數據向量轉換成高層邏輯(符號)概念。基于神經網絡的傳感器信息融合具有統一的內部知識表示形式, 通過學習算法可將網絡獲得的傳感器信息進行融合, 獲得相應網絡的參數, 并且可將知識規則轉換成數字形式, 便于建立知識庫; 利用外部環境的信息, 便于實現知識自動獲取及并行聯想推理; 能夠將不確定環境的復雜關系, 經過學習推理, 融合為系統能理解的準確信號; 由于神經網絡具有大規模并行處理信息能力, 使得系統信息處理速度很快。神經網絡的優越性和強大的非線性處理能力, 能夠很好地滿足多傳感器數據融合技術的要求。神經網絡具有較強的容錯性和自組織、自學習、自適應能力, 能夠實現復雜的映射。
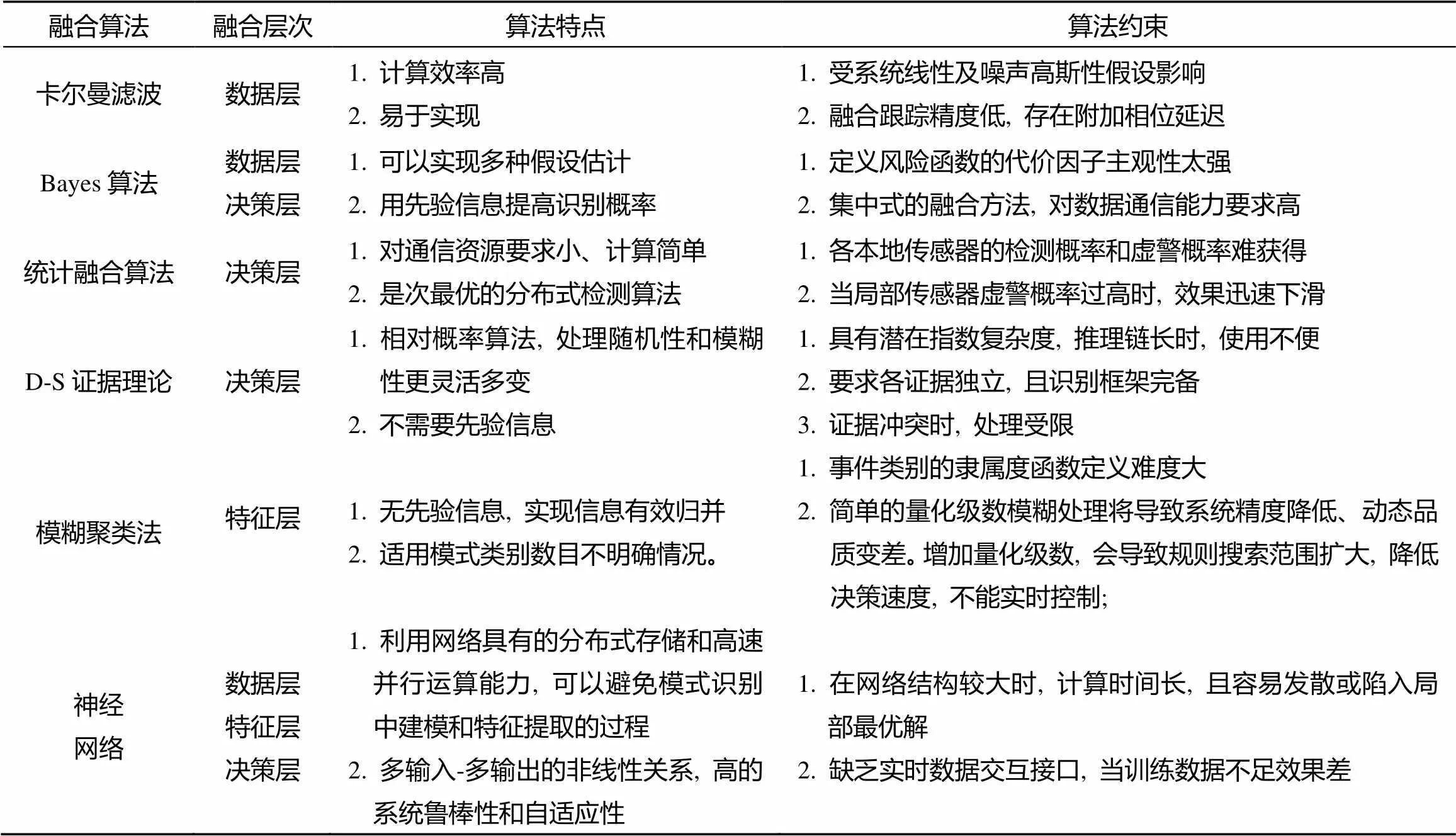
表2 常用信息融合算法的特點及約束
2.3 其他方法
除了上述典型的算法, 在信息融合技術研究中還有許多其他的方法, 代表性的有以下幾種: Fisher判別分析法、主成分分析法、粗糙集理論、近似網格濾波法(approximate grid-based method)、小波分層圖像融合法、粒子濾波法、基于馬爾可夫的隱馬爾可夫建模(hidden Markov model, HMM)和雙馬爾可夫鏈(pairwise Markov chains, PMC)模型法, 基于熵規范的方法, JSM方法(John Stuart Mill algorithm)等。
上述眾多的信息融合算法, 其性能各具特色。表2給出了常用信息融合模型的集中算法的特點以及各自的應用約束。
3 水下目標融合識別研究中的問題及設想
3.1 水下多傳感器網絡的結構設計
水下多傳感器目標融合識別系統的模型結構設計應結合實際水文背景, 考慮各水下節點間水聲信號傳輸速率小, 信號傳輸時延大, 傳輸誤碼率高, 傳輸所用的帶寬有限, 多徑, 衰落及多普勒頻移干擾嚴重等因素的影響, 研究各傳感器節點合理的布放方式, 并將網絡的拓撲結構模型設計和信息處理的功能模型設計結合起來。此外, 在信息融合系統的設計中, 為了保證系統的精確度、實時性以及降低成本, 應該根據理論模型和測試數據范圍適當選擇合適的傳感器組, 要考慮局部動態環境的影響及其對策, 并將最終的融合結果用于網絡的反饋管理。圖3給出了一種信息處理功能模型和傳感器拓撲結構模型相結合的水下多傳感器網絡設想。
3.2 信息融合的算法選擇
對于目標的探測和識別這一領域的信息融合, 人們常注重某一功能或結構或算法的研究, 卻忽視了它們之間內在的聯系與溝通, 缺乏整體合理的設計理念, 對于大型的信息融合系統往往導致研究范疇模糊, 缺乏統一的系統設計工程和規范, 不利于信息融合系統的穩健性與容錯性。針對此, 可以研究特定模型體系的各推理理論的組合方法, 結合多種算法的優勢, 克服單一算法的不足。另外, 可以針對某一特定算法的不足和限制進行新算法的設計, 目前大量的新型算法開始應用于目標的融合識別, 例如: LVQ算法, Dezert Smarandache Theory(DSMT)算法等。對于實際應用中存在的訓練數據不足情況, 可以考慮混合模式識別技術。另外, 如果把模式分類器與一個自動推理環節相結合, 根據具體任務或實際環境來解釋得到的結果, 也有可能克服由于缺乏訓練數據帶來的問題。
3.3 有效的融合效果評價模型設計
究竟一個融合系統功能結構或算法執行效能如何, 對系統成功的概率貢獻大小如何, 需要對信息融合策略的評估進行研究。通常, 融合系統的評估要對系統設計—實施—使用效果進行全過程評估, 要建立實用的評估體系, 包括指標體系和算法體系, 這些都非常依賴于具體問題的要求和現代數學的發展。對于融合識別這種典型的分層融合系統, 評價其性能的方法包括量測融合與狀態向量融合。其中量測融合盡管是最優的, 然而其計算代價太大; 而狀態向量融合算法較為節省計算機資源, 但是由于該方法根據公共先驗估計或是公共過程噪聲來進行關聯, 因此它并不是最優的, 且這些方法在對真實系統進行評估的時候卻仍然存在著難題。近年, 基于現代計算機技術和虛擬現實技術等現代仿真技術建立起來的仿真系統, 可以完成對整個融合過程蒙特卡洛的統計仿真試驗, 然后對試驗結果的分析和比較也是一種有效的系統評估途徑。
4 結束語
信息融合技術可以使水下智能武器系統具有自學習能力、自適應能力、自組織能力和容錯能力, 可以使系統快速完成對各種途徑的不同信息有效的融合處理, 提高對目標的解釋和描述能力。本文立足于水下無人值守作戰平臺的目標探測和識別, 對多傳感器網絡的信息融合模型、融合算法、發展動向、存在的問題和解決這些問題的思路給出了系統的綜述。盡管信息融合技術已經滲透到研究的各個領域, 并取得了重大的進步, 然而, 目前在理論上尚未形成統一的框架, 而在實際系統設計上則缺乏有效的指導原則, 系統全過程的評估方法研究更是成效甚微, 很多問題還有待解決。
[1] 楊雷. 弱小目標檢測與多傳感器數據融合跟蹤技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2007.
[2] Veeravalli V V, Varshney P K. Distributed Inference in Wireless Sensor Networks[J]. Philosophical Transactions of Royal Society, 2012, 370(1958): 100-117.
[3] 王祁. 傳感器信息處理及應用[M]. 北京: 科學出版社, 2012.
[4] 蒲書縉. 復雜環境下目標識別的智能數據融合技術研究 [D]. 哈爾濱: 哈爾濱工業大學, 2006.
[5] Gainet J, Blasch E. Development of Emergent Processing Loops as A System of Systems Concept[C]//Proceedings of AeroSense Conference, 1999: 186-195.
[6] Hall D L, McMullen S A. Mathematical Techniques in Multisensor Data Fusion[M]. USA: Artech House, 2004.
[7] Bedworth M. Probability Moderation for Multilevel Information Processing[R]. Personal Communication, 1992.
[8] Bedworth M, Obrien J.The Omnibus Model: A New Model of Data Fusion[J].IEEE Aerospace and Electronic Systems Magazine, 2000, 5(4): 30-36.
[9] Paradis S, Roy J. An Architecture and a Facility for the Integration of All Levels of Data Fusion[C]//Proceedings of International Conference on Information Fusion. France: Paris, 2000: 278-384.
[10] 仲崇權, 張立勇, 楊素英, 等. 基于最小二乘原理的多傳感器加權融合算法[J]. 儀器儀表學報, 2003, 25(4): 427- 430.Zhong Chong-quan, Zhang Li-yong, Yang Su-ying, et al. A Weighted Fusion Algorithm of Multi-sensor Based on the Principle of Least Squares[J]. Chinese Journal of Scientific Instrument, 2003, 25(4): 427-430.
[11] Yue J, Yang R, Huan R. Pixel Level Fusion for Multiple SAR Images Using PCA and Wavelet Transform[C]//Proceedings International Conference on Radar, 2006: 1-4.
[12] Venkatalakshmi K, Shalinie S M. Classification of Multi- spectral Images Using Support Vector Machines Based on PSO and K-means Clustering[C]//Proceedings International Conference on Intelligent Sensing and Information Processing, 2005: 127-133.
[13] Dixon S J, Brereton R G.. Comparison of Performance of Five Common Classifiers Represented as Boundary Methods: Euclidean Distance to Centroids, Linear Discriminant Analysis, Quadratic Discriminant Analysis, Learning Vector Quantization and Support Vector Machines, as Dependent on Data Structure[J]. Chemometrics and Intelligent Laboratory Systems, 2009, 95(1): 1-17.
[14] Luo R C, Su K L. A Review of High-level Multi-sensor Fusion: Approaches and Applications[C]//Proceedings International Conference on Multisensor Fusion and Integration for Intelligent Systems, 1999: 25-31.
[15] Bracio B R, Horn W, Moller D P F. Sensor Fusion in Biomedical Systems[C]//Proceedings of the 19th Annual International Conference on Engineering in Medicine Biology Society, 1997: 1387-1390.
[16] Widjaja F, Shee C Y, Latt W T, et al. Kalman Filtering of Accelerometer and Electromyography (EMG) Data in Pathological Tremor Sensing System[C]//Proceedings of IEEE International Conference on Robotics and Automation, 2008: 3250- 3255.
[17] Pan H, Mcmichael D, Lendjel M. Inference Algorithms in Bayesian Networks and The Probanet System[J]. Digital Signal Processing, 1998, 8(4): 231-243.
[18] Veeravalli V V, Varshney P K. Distributed Inference in Wireless Sensor Networks[J]. Philosophical Transactions of Royal Society. 2012, 370(1958): 100-117.
[19] 楊風暴, 王肖霞. D-S證據理論的沖突證據合成方法[M]. 北京: 國防工業出版社, 2010.
[20] Murofusi T, Sugeno M. Fuzzy T-conorm Integral with Respect to Fuzzy Measures: Generalization of Sugeno Integral and Choquet Integral[J]. Fuzzy sets and Systems, 1991, 42(1): 57-71.
[21] 彭力. 信息融合關鍵技術及其應用[M]. 北京: 冶金工業出版社, 2010.
[22] Smarandache F, Dezert J. Advances and Applications of DSmT for Information Fusion [M]. USA: American Research Press, 2009.
(責任編輯: 陳 曦)
Review of Fusion Recognition Technology for Underwater Target
XIA Qing-sheng, LIU Yi-hai
(1. Representative Bureau in Chongqing, Naval Armament Department, Chongqing 401120, China; 2.College of Marine Engineering, Northwestern Polytechnical University, Xi′an 710075, China)
Information fusion techniques, which can help to effectively reduce or eliminate the measuring uncertainty of distributed sensors′ signal and fuse more comprehensive original vessel radiated signals, have been widely used in various military and civilian fields, and have attracted more concerns in the world. In this paper, the existing most accepted function models of the fusion systems are summarized, and a three-level (data-feature-decision) underwater automatic target recognition (ATR) system model is proposed. Subsequently, several commonly used fusion algorithms based on the probability theory, the data classification theory, and the artificial intelligence theory are presented, and their advantages, disadvantages and application constraints are analyzed. Moreover, the development trend of the underwater target fusion recognition system based on multi-sensor system, the existing problems, and the solutions to these problems are all discussed.
target recognition; information fusion; multi-sensor system; fusion algorithm
TP212
A
1673-1948(2013)03-0234-07
2013-03-13;
2012-05-06.
夏慶升(1966-), 男, 高級工程師, 長期從事水中兵器監造工作.
猜你喜歡
當代陜西(2022年5期)2022-04-19 12:10:18
今日農業(2021年19期)2022-01-12 06:16:36
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
中老年保健(2021年11期)2021-08-22 03:15:44
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
現代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
