基于受流軌特性的磁浮列車定位方法研究*
2013-09-25 07:24:28劉國清張昆侖靖永志
城市軌道交通研究 2013年9期
劉國清 張昆侖 靖永志
(磁浮技術(shù)與磁浮列車教育部重點(diǎn)實(shí)驗(yàn)室,610031,成都∥第一作者,助理研究員)
磁浮列車定位系統(tǒng)能夠?yàn)榱熊囎詣?dòng)防護(hù)(ATP)子系統(tǒng)、自動(dòng)運(yùn)行(ATO)子系統(tǒng)、自動(dòng)監(jiān)控(ATS)子系統(tǒng)提供準(zhǔn)確的位置信息。其定位方法的精度和可靠性是確定列車安全防護(hù)距離的重要因素,對軌道交通系統(tǒng)的效率、閉塞控制的方式、列車運(yùn)行控制系統(tǒng)的兼容性和生命周期費(fèi)用等都具有重要的影響[1]。因此,深入研究列車定位方法,對于推動(dòng)列車運(yùn)行控制系統(tǒng)的研究和軌道交通系統(tǒng)的發(fā)展具有重要的意義。目前,應(yīng)用于列車定位系統(tǒng)的技術(shù)有多種,如光電感應(yīng)定位測速、微波定位測速、接近傳感器定位測速、交叉感應(yīng)回線定位測速、GPS(全球定位系統(tǒng))定位技術(shù)等[2-5]。在這些檢測方式中,有的地面設(shè)備需要帶電工作,易受到外界環(huán)境的影響,且增加了維護(hù)成本;有的檢測物體的位置具有間斷性,是非連續(xù)性的檢測方式;有的結(jié)構(gòu)復(fù)雜,可靠性差;有的設(shè)備昂貴,成本高。
本文通過研究磁浮列車供電系統(tǒng)中受流軌的特性,提出并分析了一種新型的用于磁浮列車的定位方法[7],闡述了該定位方法的原理以及派生出的3種拓?fù)浣Y(jié)構(gòu),并利用現(xiàn)有10m磁浮模型車系統(tǒng)對基于該方法實(shí)現(xiàn)的定位裝置進(jìn)行了試驗(yàn)驗(yàn)證。試驗(yàn)表明:該定位方法簡單易行,可以避免在線路沿線鋪設(shè)大量的測量裝置;其測量系統(tǒng)完全具備室內(nèi)放置的條件,成本低廉、可靠性高、易于維護(hù),且位置測量值具有連續(xù)性。
1 磁浮列車受流軌
受流軌供電也稱第三軌供電。其概念由德國西門子公司于1879年提出,并迅速得到了發(fā)展。目前,軌道交通例如地鐵、輕軌、有軌電車和磁浮列車等均采用了受流軌技術(shù)[7]。磁浮列車通常采用側(cè)向受流方式和DC 1 500V供電制,其受流裝置通常安裝在懸浮架底部,接入±DC 1 500V兩條受流軌分別安裝在線路基礎(chǔ)的兩側(cè),磁浮車受流靴在彈簧力作用下,通過與受流軌機(jī)械滑動(dòng)接觸,實(shí)現(xiàn)列車供電(如圖1所示)。
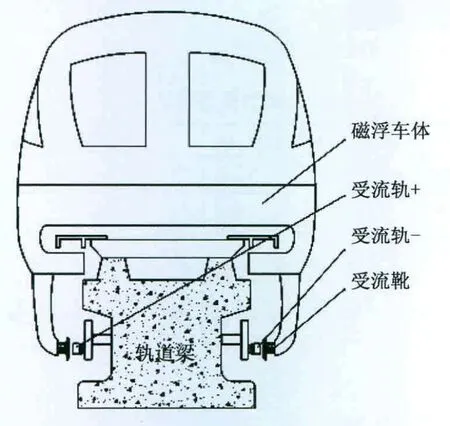
圖1 磁浮列車受流示意圖
2 基于受流軌特性的列車定位原理
受流軌采用鋁合金和不銹鋼材料經(jīng)復(fù)合加工而成。其特點(diǎn)是截面單一,材質(zhì)分布均勻。常規(guī)的磁浮列車由線路兩端的兩個(gè)變電站供電[9]。現(xiàn)將磁浮列車當(dāng)作負(fù)載RT,忽略各段受流軌間的接觸電阻。設(shè)線路總長為L,列車所處位置距線路兩端的距離分別為L1和L2,受流軌材料的電阻率為ρ,受流軌截面積為A,利用電壓、電流測量裝置,可以獲得受流軌兩端的電壓U1和U2,以及流過受流軌的電流i1和i2,如圖2所示。

圖2 基于受流軌特性的列車定位方法原理圖
確定了L1或L2的值,便可實(shí)現(xiàn)對列車的定位。圖2所示的列車定位方法的數(shù)學(xué)模型可表示為:


其中,RL1、RL2分別是長度為L1和L2的受流軌對應(yīng)的電阻值,由受流軌的材料和截面積決定,其表達(dá)式為:
由于磁浮列車在懸浮過程中其懸浮電流是不斷變化的,對應(yīng)的負(fù)載RT也不是一個(gè)常量。所以,需在列車上布置一電壓測量裝置實(shí)時(shí)檢測列車兩側(cè)受流靴之間的電壓值UF,并通過無線通信的方式送入定位系統(tǒng)。該電壓值與列車負(fù)載的關(guān)系為:

利用電壓、電流測量裝置獲得的值,可計(jì)算出列車所處位置對應(yīng)的受流軌的電阻值,進(jìn)而確定列車的位置。由式(1)、(2)和(3)可以看出,利用一種或數(shù)種電壓、電流測量裝置的搭配,即可實(shí)現(xiàn)對列車的定位。
在獲得列車的位置信息后,只需將該位置數(shù)據(jù)實(shí)時(shí)地送入數(shù)據(jù)處理器件,如單片機(jī)、DSP(數(shù)字信號(hào)處理器)、FPGA(現(xiàn)場可編程邏輯門陣列)、PC機(jī)、工控機(jī)等。利用速度-位移公式即可得出列車的運(yùn)行速度。

式中:
v——列車運(yùn)行速度;
ΔT——采樣的時(shí)間間隔;
ΔL——采樣時(shí)間間隔內(nèi)的位置變化量。
基于受流軌特性的列車定位系統(tǒng)的結(jié)構(gòu)框圖如圖3所示。

圖3 列車定位系統(tǒng)結(jié)構(gòu)框圖
3 不同拓?fù)浣Y(jié)構(gòu)的測速定位方法
3.1 雙端測量法
由式(1)和(2)相減可以消去列車負(fù)載,得到:

由式(8)和式(3)可以確定列車位置。其定位方法的拓?fù)浣Y(jié)構(gòu)如圖4所示。
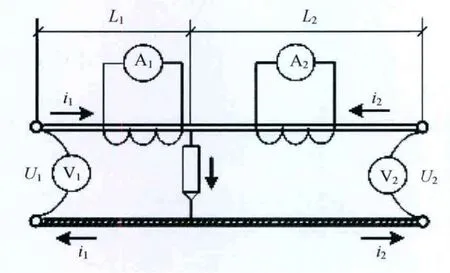
圖4 雙端測量法拓?fù)鋱D
采用這種方法可以將電壓、電流測量裝置放置于室內(nèi),沿線路鋪設(shè)一條專門的通信線纜,或利用無線傳輸?shù)姆绞綄y量數(shù)據(jù)送入數(shù)據(jù)處理裝置。
3.2 單端測量法
利用式(1)和(3)可以實(shí)現(xiàn)列車定位。其定位方法的拓?fù)浣Y(jié)構(gòu)如圖5所示。
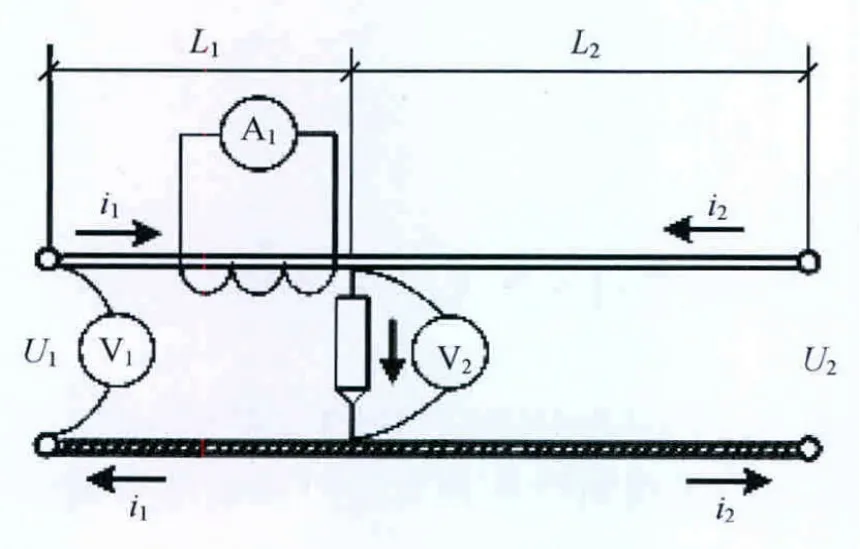
圖5 單端測量法拓?fù)鋱D
采用這種方法可以將一組電壓、電流測量裝置放置于室內(nèi),將另一電壓測量裝置布置在列車上,必須利用無線通信的方式將測量值送入數(shù)據(jù)處理裝置。
利用式(2)和(3)也可以實(shí)現(xiàn)列車定位,與上述雙端測量法、單端測量法唯一的區(qū)別只是測量裝置放置地點(diǎn)的不同。
4 在10m長磁浮線上模型車的試驗(yàn)驗(yàn)證
4.1 列車定位裝置的實(shí)現(xiàn)
利用現(xiàn)有10m長磁浮線上模型車系統(tǒng),對基于該原理的列車定位裝置進(jìn)行試驗(yàn)驗(yàn)證。該模型車受流軌的參數(shù)如表1所示。

表1 模型車受流軌參數(shù)
由于工作電流不大(DC 48V,20A),該磁浮模型車沒有設(shè)專門的變電站供電,而是采用1 000W的開關(guān)電源。電源接入受流軌的方式是兩端接入,如圖6所示。
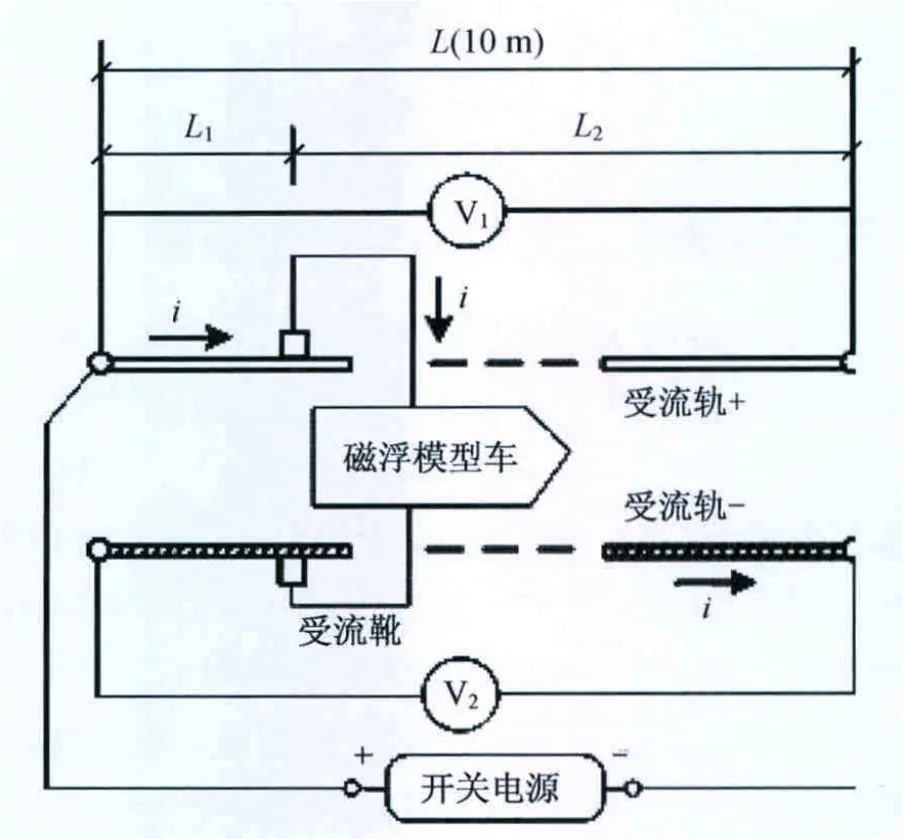
圖6 10m長磁浮線上模型車定位裝置原理圖
開關(guān)電源的正負(fù)極分別接在兩側(cè)受流軌的兩端,利用先前建立數(shù)學(xué)模型的方法可以得出:

從式(9)可得出:對于磁浮模型車系統(tǒng)來說,只需要測量其兩側(cè)受流軌端部的電壓值便可確定列車位置。采用兩通道以上12位的A/D(模/數(shù))采樣芯片(MAX1312)采集電壓值,并利用 DSP(TMS320F2812)進(jìn)行數(shù)據(jù)處理,制備出一套定位裝置。
4.2 試驗(yàn)方法和結(jié)果
在模型車軌道上每隔0.5m設(shè)立一位置標(biāo)志,將磁浮模型車浮起后,手動(dòng)推動(dòng)模型車前進(jìn),將其準(zhǔn)確停靠在每個(gè)標(biāo)志位,并利用定位裝置對處于每個(gè)位置標(biāo)志的模型車進(jìn)行位置測量,最后將定位裝置得到的位置信息和位置標(biāo)志進(jìn)行比對。試驗(yàn)結(jié)果如表2所示。

表2 定位試驗(yàn)結(jié)果
由表2可以得出,磁浮模型車在10m長軌道上運(yùn)行時(shí),利用該定位裝置可以較精確地測量出列車的位置。
5 結(jié)語
利用受流軌的電阻率特性和材料的一致性,可以得到一種新的用于磁浮列車的定位方法,利用該方法實(shí)現(xiàn)的測量裝置可放置在室內(nèi),并具有成本低廉、易于維護(hù)的特點(diǎn)。利用該方法可以得到幾種不同拓?fù)浣Y(jié)構(gòu)的定位模型。這幾種模型各有自己的優(yōu)缺點(diǎn),可根據(jù)實(shí)際的需要選擇定位模型。
利用該方法實(shí)現(xiàn)的定位裝置,其模型試驗(yàn)的測量精度小于5%。如果需要更高的定位測量精度,則需要對受流軌的材料和截面形狀的一致性提出更高的精度要求,并需采用更高精度的電壓和電流測量裝置。通過在磁浮模型車系統(tǒng)上的試驗(yàn)表明,該定位方式是可行的。
本文提出的方法用在具有整段受流軌的線路上較為合適,而在實(shí)際的軌道交通線路中,由于受流軌間存在接縫,會(huì)引出接觸電阻的問題,目前正利用查表法嘗試解決這一問題。目前的難點(diǎn)在于如何實(shí)現(xiàn)較高的位置測量精度。但無論如何,該方法還是具備一定的應(yīng)用價(jià)值,可作為現(xiàn)有磁浮列車定位技術(shù)的一種補(bǔ)充。
[1]張湘,連級(jí)三,張昆侖.磁浮列車機(jī)械制動(dòng)系統(tǒng)的自適應(yīng)控制研究[J].鐵道學(xué)報(bào),2002,24(3):18.
[2]郭小舟,王瀅,王式雄.高速磁懸浮列車定位測速系統(tǒng)[J].西南交通大學(xué)學(xué)報(bào):自然科學(xué)版,2004,39(4):455.
[3]龍志強(qiáng),李曉龍,周文武,等.磁懸浮列車的定位和測速技術(shù)研究[J].國防科技大學(xué)學(xué)報(bào),2003,25(4):83.
[4]楊建勇,連級(jí)三.基于軌間電纜的磁懸浮列車定位測速[J].機(jī)車電傳動(dòng),2001(1):30.
[5]戴春輝,薛松,龍志強(qiáng).基于長定子齒槽的磁浮列車測速定位傳感器信號(hào)處理[J].傳感技術(shù)學(xué)報(bào),2009,22(6):823.
[6]劉國清.一種受流裝置的定位方法:中國,200910222254.7[P].2011-06-15.
[7]胡基士,潘慧龍.磁浮列車受流器設(shè)計(jì)依據(jù)分析[J].西南交通大學(xué)學(xué)報(bào):自然科學(xué)版,2000,35(2):171.
[8]吳祥明.磁浮列車[M].上海:上海科學(xué)技術(shù)出版社,2003:192.
猜你喜歡
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2020年6期)2020-07-25 02:31:36
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
意林原創(chuàng)版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21