AT89S52的交流異步電機變頻調速系統(tǒng)
2013-10-10 01:56:42董家璽常甲興王曉明
單片機與嵌入式系統(tǒng)應用 2013年6期
董家璽,常甲興,王曉明
(遼寧工業(yè)大學 機械工程與自動化學院,錦州121001)
引 言
目前交流異步電動機的調速已經(jīng)廣泛應用于數(shù)控機床、風機、泵類等設備的動力源或運動源,并起到節(jié)約電能、提高效率等良好效果。因此,交流異步電動機調速技術是現(xiàn)代自動控制專業(yè)技術人員必須掌握的知識。
1 交流異步電動機變頻調速原理
根據(jù)電機學理論,交流異步電動機的轉速可表示為:

式中:n為電動機轉數(shù);p為電動機磁極對數(shù);f為電源頻率;s為轉差率。由上式可知,影響電動機轉速的因素有:轉差率、磁極對數(shù)、電源頻率。其中,改變電源頻率來實現(xiàn)交流異步電動機調速的方法是最理想的,這就是所謂的變頻調速。
2 系統(tǒng)的硬件設計
整個控制系統(tǒng)由兩部分組成,即控制電路和驅動電路。控制電路以AT89S52為控制核心,配以三相SPWM信號發(fā)生和控制集成芯片SA4828。驅動電路是以PS21564為核心的智能功率模塊(Intelligent Power Module,IPM)。硬件接口電路如圖1所示。
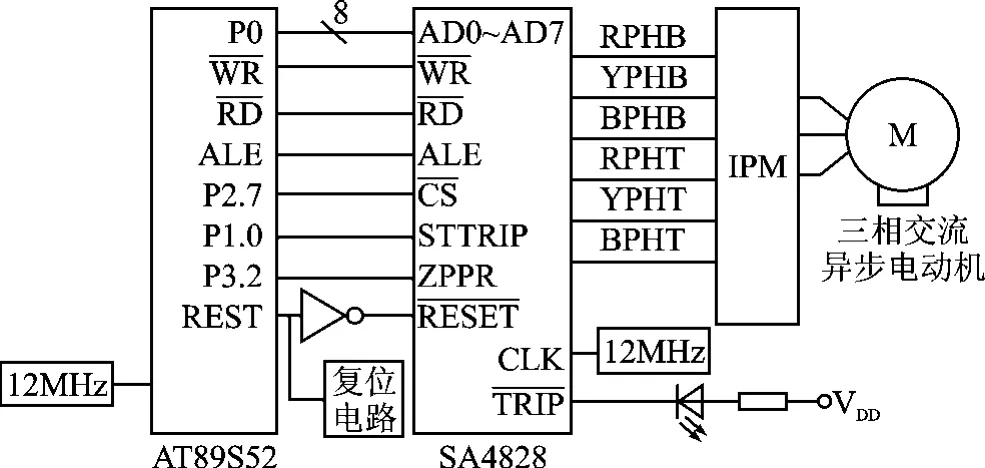
圖1 硬件接口電路
2.1 SA4828專用運動控制芯片
SA4828工作原理:來自AT89S52的數(shù)據(jù)通過總線控制和譯碼器進入初始化寄存器或控制寄存器。它們對相控邏輯電路進行控制。外部時鐘輸入經(jīng)分頻器分成設定的頻率,并生成三角形載波,三角形載波與所選定的片內ROM中的調制波形進行比較,自動生成SPWM輸出脈沖。通過脈沖刪除電路,刪去比較窄的脈沖,因為這樣的脈沖不起任何作用,只會增加開關的損耗。通過脈沖延時電路生成死區(qū),保證任何橋臂上的兩個開關不會在狀態(tài)轉換期間短路。看門狗定時器用來防止程序的跑飛,當時間條件滿足時快速封閉輸出,極大地減輕了單片機的負擔。
片內ROM存有三種可供選擇的波形,如圖2所示。分別為純正弦波形、增強型波形和高效型波形。每一種波形各1536個采樣值。增強型波形又稱三次諧波,它可以使輸出功率提高20%,三相諧波相互抵消,防止電動機發(fā)熱。高效型波形又稱死區(qū)帶三次諧波,它是進一步優(yōu)化的三次諧波,可以減少逆變開關的損耗,提高功率利用率。
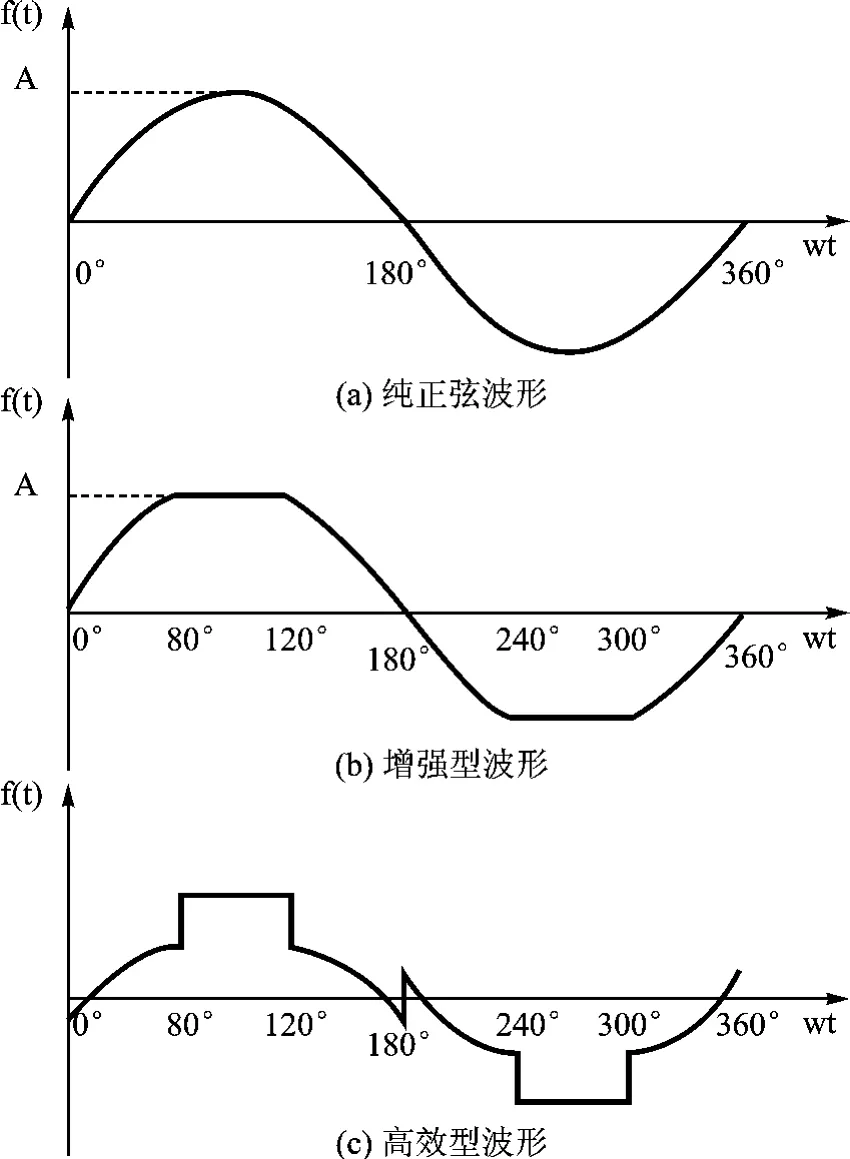
圖2 片內ROM存有的三種波形
SA4828主要具有以下特點:
①具有增強型微處理器接口,可與更多的單片機兼容;
② 將調制波頻率的分辨率提高到16位;
③ 由于采用了可由用戶選擇的三相幅值獨立控制方式,因而使得三相逆變可用于任意不對稱負載;
④ 有三種可供選擇的輸出波形,適用于多種應用場合;
⑤ 可提供軟件復位功能;
⑥內置看門狗定時器以加強監(jiān)控,從而提高了可靠性。
2.2 智能功率模塊PS21564
PS21564采用第5代IGBT技術,6單元三相輸出結構如圖3所示,內置優(yōu)化后的柵極驅動技術和保護電路,以超小型的體積,輸出功率強勁的三相波。圖中U、V和W為逆變橋的輸出,它們?yōu)橄嗖?20°來自SA4828的高壓SPWM波。逆變橋由兩組(3個上橋臂IGBT,3個下橋臂IGBT)構成,每一時刻總有3只逆變管導通,另外3只逆變管關斷,并且上下橋臂的3對一一對應,逆變管不能同時導通。PS21564具有短路、欠壓、過熱保護功能,一旦發(fā)生故障,內部的6個逆變管就會同時關斷,同時發(fā)出故障信號到主控制器單片機,單片機控制SA4828停止發(fā)送SPWM波,并向保護中斷引腳發(fā)出中斷請求。
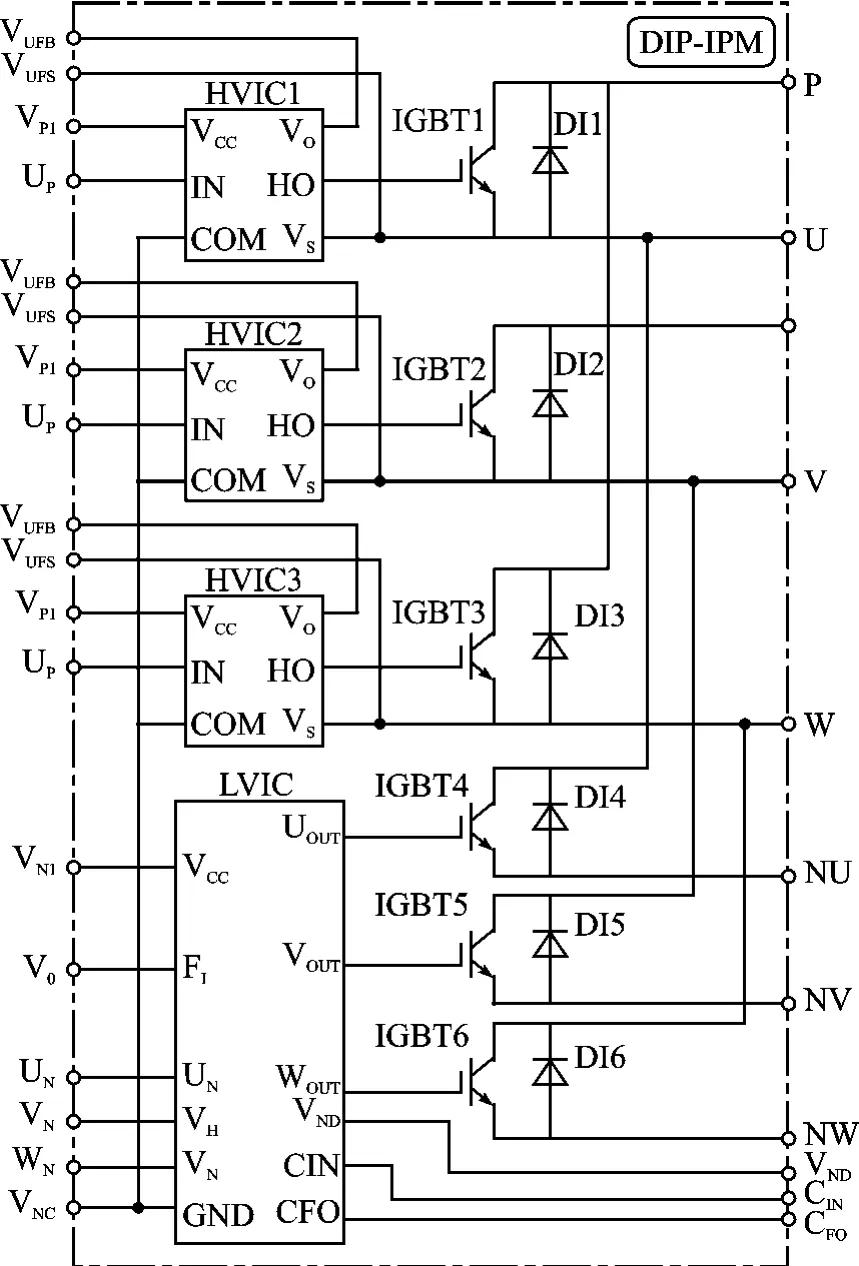
圖3 PS21564的6單元三相輸出結構圖
2.3 光耦隔離
由于SA4828數(shù)據(jù)處理器輸出的是高速PWM脈沖信號,且智能功率模塊PS21564對SPWM脈沖的規(guī)則性要求很高,需要反應速度較快的光耦,普通的P521光耦無法滿足速度要求,故設計中采用的是一款專用的IPM驅動芯片HCPL4504。HCPL4504是美國安捷倫公司專為IPM等功率器件設計的高速光電隔離接口芯片,瞬間共模比為15kV/μs,內部集成高靈敏度光傳感器,可以準確、快速地反映信號變化狀況。
同時,為了防止SA4828數(shù)據(jù)處理器和智能功率模塊PS21564的相互影響以及高壓輸出的人身危險,建議使用HCPL4504的光耦隔離。圖4所示為IPM的上橋臂隔離。圖5所示為IPM的下橋臂隔離。
3 系統(tǒng)的軟件設計
單片機將數(shù)據(jù)送入SA4828芯片內的兩個寄存器(初始化寄存器和控制寄存器)。初始化寄存器用于設定與交流電動機有關的基本參數(shù),這些參數(shù)要在SPWM輸出端允許輸出前設定,系統(tǒng)工作以后不允許改變。
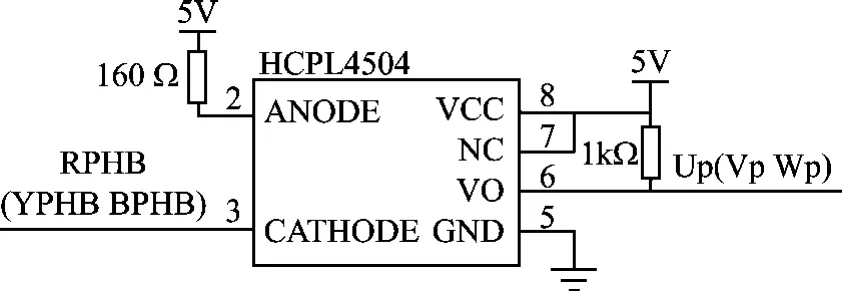
圖4 IPM上橋臂輸入電路圖
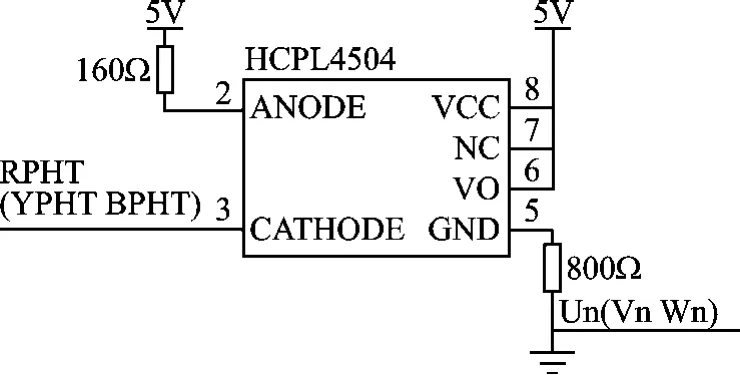
圖5 IPM下橋臂輸入電路圖
3.1 主程序設計
單片機首先初始化SA4828,打開中斷系統(tǒng)。傳送控制參數(shù)后,若SA4828允許輸出,則單片機向其發(fā)出SPWM的控制信號,驅動及隔離電路開始工作。在運動過程中,單片機不斷地處理反饋信號,及時地對SPWM波進行調整,來滿足系統(tǒng)的需要,如圖6所示。
3.2 調速子程序
SA4828寄存器列陣包含8個8位寄存器R0~R5和R14、R15。其中,R0~R5用來暫存來自單片機的數(shù)據(jù),這些數(shù)據(jù)可能是初始化數(shù)據(jù),或者是控制數(shù)據(jù);而R14、R15是2個虛擬寄存器,物理上不存在。當向R14寫操作時,實際是將R0~R5中存放的48位數(shù)據(jù)送入初始化寄存器。當向R15寫操作時,是將R0~R5中存放的48位數(shù)據(jù)送入控制寄存器,如表1所列。控制寄存器在工作過程中控制輸出脈寬調制波的狀態(tài),從而進一步控制交流電動機的運行狀態(tài)。通常在工作時,該寄存器的內容常被改寫,以實現(xiàn)對交流電動機的速度進行控制。調速子程序如圖7所示。

表1 各寄存器地址
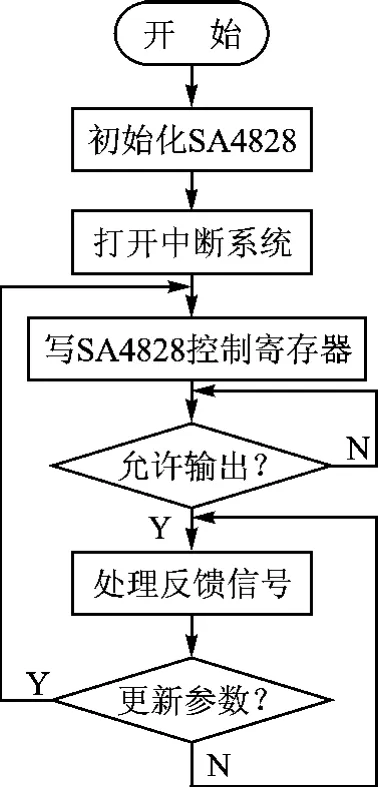
圖6 系統(tǒng)主程序流程
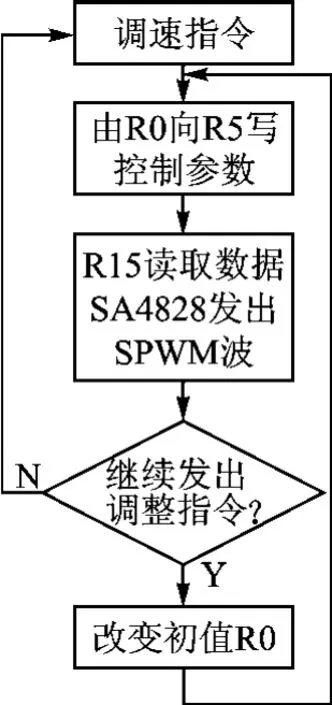
圖7 調速子程序
3.3 中斷子程序
中斷處理程序針對都是需要立即處理的情況和突發(fā)事件,例如過流、欠壓、外部故障等情況。一旦故障發(fā)生,SA4828的SETTRIP端口就會立即啟動故障保護程序,封鎖SPWM波的發(fā)送,同時將TRIP端口置0并且向單片機發(fā)出開中斷申請。中斷保護子程序如圖8所示。
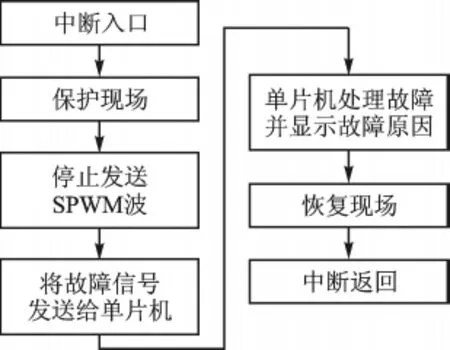
圖8 中斷子程序
4 實驗結果
上電后,系統(tǒng)運行頻率為10Hz時SPWM波形如圖9所示。系統(tǒng)運行頻率為45Hz時,SPWM波形如圖10所示。
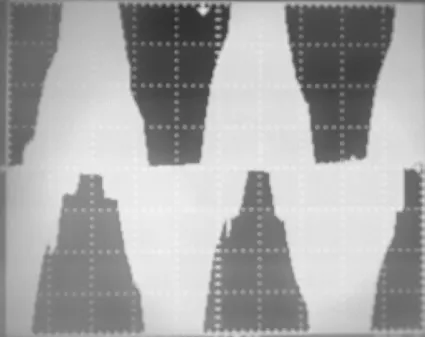
圖9 10Hz時SPWM的波形
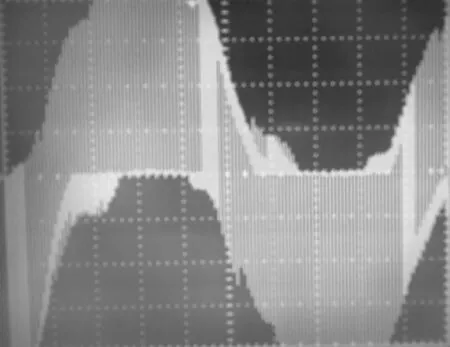
圖10 45Hz時SPWM的波形
結 語
該系統(tǒng)具有成本低廉、動態(tài)響應快、控制精度高等優(yōu)點。實驗證明,本系統(tǒng)還有良好的抗干擾能力,對電機調速系統(tǒng)的設計和應用也具有指導意義。
[1]王曉明.電動機的單片機控制[M].北京:北京航空航天大學出版社,2002.
[2]王曉明.電動機的DSP控制——TI公司的DSP應用[M].北京:北京航空航天大學出版社,2004.
[3]王曉明.電動機的ADSP控制——ADI公司 ADSP應用[M].北京:北京航空航天大學出版社,2010.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
今日農(nóng)業(yè)(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海峽姐妹(2020年8期)2020-08-25 09:30:18
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45