基于中繼浮標實現水下運動目標大范圍監測方法研究*
2013-10-16 08:06:32劉百峰
艦船電子工程 2013年2期
劉百峰 羅 坤 趙 珩
(91388部隊94分隊 湛江 524022)
1 引言
目前,能用于水下潛艇位置監測的長基線水聲定位系統有兩種[1~3],分別是浮標式和潛標式水聲定位系統。浮標式水聲定位系統的測量浮標需要錨系于海底,對潛艇的安全機動及拖曳式聲納的安全使用造成影響。而潛標式水聲定位系統由于工藝水平及海洋噪聲影響了聲的傳播距離,使得監測船對潛標的管理有效距離大大降低,無法滿足在水下目標進行大范圍對抗時母船對其監測。本文提出了一種基于監測浮標中繼配合潛標的技術,使得在監測母船水聲作用距離之外的潛標,其聲學信號由監測浮標接收后經無線電轉發,監測母船通過監測浮標接收轉發的聲學信號實現對遠距離潛標的信號監測,從而達到擴大監測區域的目的,可有效提高潛標式水聲定位系統監測范圍。
2 浮標式長基線監測系統
浮標式長基線監測系統由船載跟蹤顯控分系統(或稱為基站)、海上浮標分系統和無線通信鏈系統等三部分組成。浮標分系統中還裝有差分GPS接收機[4~5],對浮標進行精確定位。浮標通過水聲測量水下目標的運動參數并將DGPS系統進行連續監測的浮標位置信息通過無線通信鏈匯總到基站計算機,基站將接收的參數發送到計算機,通過計算軟件解算出目標的相關信息并顯示測量參數。基站與浮標兩分系統間的數據通信任務通過無線通信鏈系統完成。
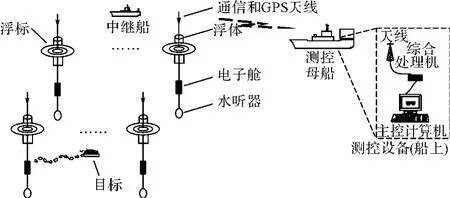
圖1 浮標式長基線監測系統原理圖
3 潛標式長基線監測系統
3.1 系統組成及功能
潛標式水聲定位系統由海底潛標陣、艇載分系統組成[6]。其中海底潛標陣在校準后通過配合艇載分系統、共同完成潛艇的水下位置監測。
3.2 工作原理
海底布放N個潛標組成測量陣,潛艇在測量陣內航行,艇載分系統在同步鐘觸發下周期性發射詢問聲信號,潛標基陣接收后發射應答聲信號,監測母船在同步鐘觸發下周期性接收應答聲信號(見圖2),測定“潛艇—潛標—監測母船”之間的聲傳播時延(Ti),監測母船的位置可由其自身的DGPS確定,各潛標的位置在測量陣布放完畢后校準確定[7]。

可求得潛艇發射位置到各潛標的空間距離(ri),以此建立方程組:

式中,(xt,yt,zt)是第t時刻潛艇的空間位置;(xi,yi,zi)是第i個潛標的空間位置;(xf,yf,zf)是監測母船的空間位置;ri為潛艇到潛標i之間的空間距離;Ti為潛艇到潛標i到監測浮標之間的聲傳播時延;C為平均聲速。
由于x,y的坐標差值遠大于z的坐標差值,因此,z方向的誤差對系統的定位誤差影響較小,可視z坐標為已知數值在解算前預先裝訂,那么,取3組方程就可以解得潛艇準確位置,如果有歷史信息作為參考,取2組方程也可以解得潛艇準確位置,這樣,可大大提高系統定位成功率。
由于水聲換能器傳播距離有限,這就需要在不放水下陣元時充分考慮到節點的通信通暢,覆蓋范圍越大,所需節點數就越多,在進行陣形設計時,必須保證各潛標與上級測距平臺測距儀通信正常,如圖2所示的6個潛標和測量母船便可構成滿足一個簡單的跟蹤陣,測量母船能實現對陣元狀態控制、導航和定位等所有功能[8]。但是,在對潛艇進行大范圍監測導航時,考慮到安全性能,測量母船不能過于接近陣區。同時,由于跟蹤區域需求過大導致母船的上的水聲換能器作用范圍不能覆蓋所有潛標,就需要中繼站這么一個節點能與母船一樣遙控潛標,并能接收潛標的應答信號完成測距。同時可把測量結果和自身狀態信息實時傳送給母船,能進行自定位,對此引入了帶有接收機的無線電遙控浮標。
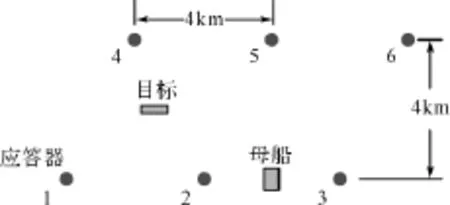
圖2 潛標式水聲定位系統監測原理圖
4 無線監測浮標中繼的監測方法
4.1 無線監測浮標中繼的監測方法原理
由于無線電通信距離一般在10km以上,這就使得無線電遙控浮標作用距離能在原來的水聲基礎上增加了一個無線電的距離。使得大范圍導航陣成為可能[9],因此,利用浮標和潛標配合,以浮標作為中繼站可構建范圍足夠大的跟蹤陣,但是考慮到海上情況的復雜性,及浮標通信的實際需求及系統容量有限,使得在陣型設計是仍然要受到許多的束縛。如圖3所示。
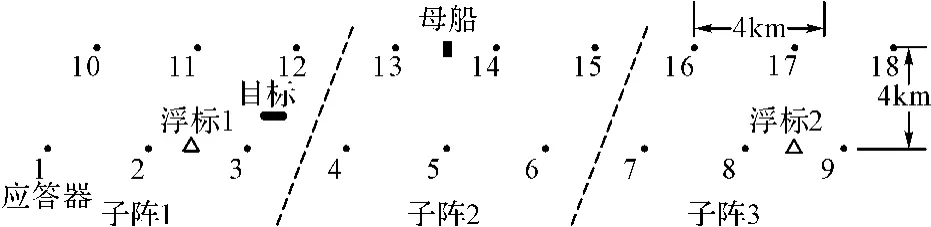
圖3 監測浮標中繼原理圖
根據中繼浮標中無線電通訊距離影響及與測量母船的配合最佳配置,可以將導航陣劃分為三個部分。根據水聲傳播距離限制,每個浮標和監測母船只能控制6潛標。
4.2 監測浮標通信設計
根據監測母船上的基站、浮標及潛標的通信方式,將無線電遙控基站設為一級節點,接收浮標上傳的水聲數據。浮標或船載測距儀稱為二級節點,負責上傳測量數據及下傳測控指令;潛標設為三級節點,實現測控功能。
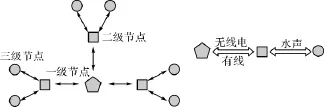
圖4 長基線系統節點分配原理圖
5 中繼浮標精度分析
對監測精度造成影響的聲速測量誤差、測時誤差、陣元誤差和GPS誤差四種因素,對傳統監測方式和通過中繼實現的監測方式進行精度的仿真分析。設定測陣誤差為5m,DGPS定位誤差為1m,分別對測時誤差為1ms和2ms,聲速誤差為3m/s和5m/s的情況做以下數據統計分析:
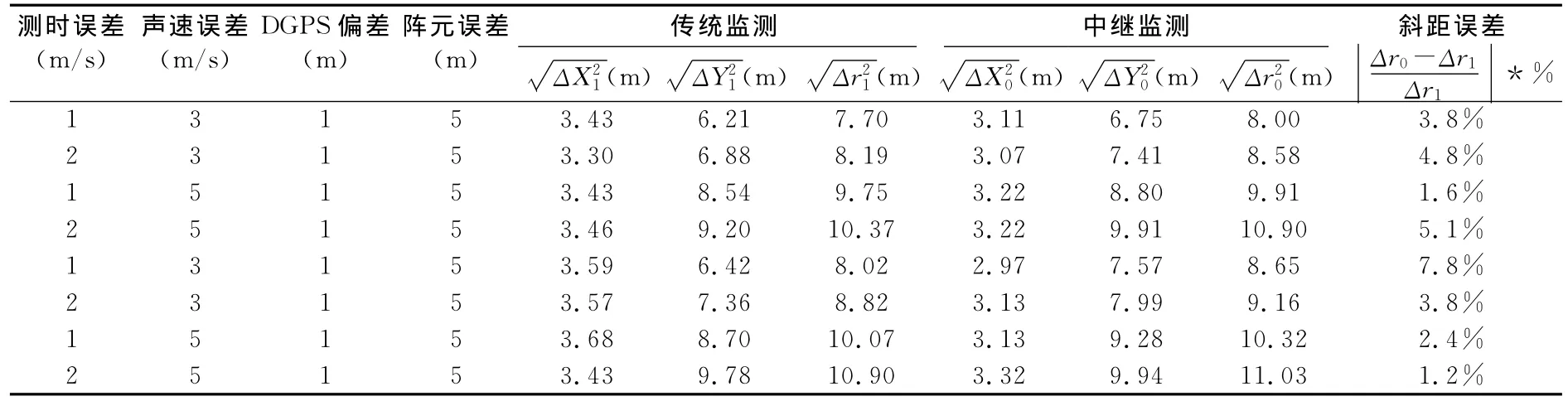
表1 誤差作用對比分析表
由表1中兩種監測方式的精度數據對比可以看出,中繼監測方式的精度與傳統監測方式的精度相當[9],各誤差對監測精度影響的變化趨勢呈現線性關系。由表中數據可以得出在DGPS誤差不超過±1m、各陣元測陣誤差不超過±5m、測時誤差不超過±2m/s、聲速測量誤差控制在0.3%左右的情況下,兩種監測方式的精度都在10m左右。由此可見,通過潛標中繼的接力技術能夠保障監測精度基本不受影響的前提下,將監測的范圍進一步擴大。
6 海上驗證
如圖5所示,在海底布放8個潛標,級聯成雙倍的測量區域,監測區邊沿布放1個監測浮標,測量船位于監測區一角虛線的潛標,另外一艘測量船作為被測目標模擬潛艇在陣內航行。采用傳統監測方式時,存在監測盲區(圖5中的網格狀部分),當潛艇航行在該區域時,監測船就無法對其進行定位。為提高監測范圍,將添加了監測浮標,通過監測浮標管理的潛標,可以大大提高對潛艇的監測范圍。

圖5 海上驗證試驗態勢圖
圖6為海上驗證試驗定位結果,布放了6個水下潛標和一個無線監測浮標。監測浮標位于測量陣下側,監測浮標測量的目標航跡位于測量陣右側盲區內,在試驗中,監測浮標管理的47#與53#潛標與48#潛標、42#潛標聯合對水下目標進行定位,實現測量盲區內的目標定位功能。可見,采用潛標中繼的信號接力方式,能增大其測量范圍。
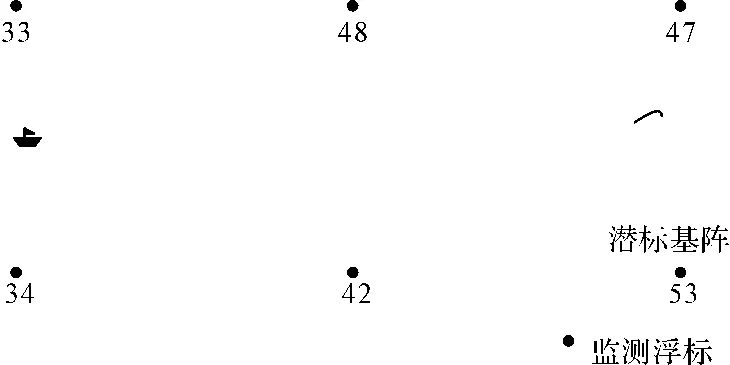
圖6 中繼浮標的目標監測航跡圖
7 結語
基于潛標式水聲定位系統實現的水下潛艇位置監測,對潛艇的安全機動影響最小。結合無線監測浮標中繼的信號接力技術,可有效提高水下潛艇的監測區域,對實現大范圍監測具有重要的意義,但是此技術對監測浮標的可靠性、及無線電的傳輸距離要求較高。
[1]李啟虎.水聲學研究進展[J].聲學學報,2001,26(4):295-301.
[2]李守軍,包根生,吳水根.水聲定位技術的發展現狀與展望[J].海洋技術,2005,24(1):131-135.
[3]Kussat,N.H.,Chadwell,C.D.,Zimmerman,R.Absolute positioning of an autonomous underwater vehicle using GPS and acoustic measurements[J].IEEE Journal of Oceanic Engineering,2005,30(1):153-164.
[4]陳子,許楓.GPS時鐘同步在水下定位系統中的應用[M].微計算機應用,2008,29(8):86-89.
[5]蔡艷輝,楊新紅.差分GPS水下定位系統的解析法分析[J].大地測量與地球動力學,2008,28(6):101-106.
[6]劉林泉,水聲綜合測控系統關鍵技術研究[D].哈爾濱工程大學博士學位論文,2008:85-96.
[7]王澤民,羅建國,陳琴仙,等.水下高精度立體定位導航系統[J].聲學與電子工程,2005,(2):1-3.
[8]黃韋達.長基線定位導航系統浮標水聲軟件設計[D].哈爾濱工程大學碩士論文,2008:85-96.
[9]趙珩.長基線系統絕對測陣的精度分析[J].水中兵器靶場,2010,(3):49-55.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
