一種空間3DOF并聯柔索驅動機器人仿真研究
2013-10-17 13:29:34韓莉莉許軍輝朱邦河
制造業自動化 2013年23期
關鍵詞:模型
韓莉莉,許軍輝,寧 祎,朱邦河
HAN Li-li,XU Jun-hui,NING Yi,ZHU Bang-he
(河南工業大學,鄭州 450007)
0 引言
空間機器人受工作環境的限制,對重量和構形比較敏感。同時,空間作業要求機器人在動作和工作空間上具有一定的柔性,傳統的機器人一般通過桿傳動,使機器人的重量較大,工作空間柔性不足。柔索驅動機器人的出現,為解決這一問題提供了有效手段。它用柔索代替傳統并聯機器人的連桿,從而在很大程度上降低了機器人的重量,并增加了在構型上的柔性。自20世紀 80 年代以來,柔索驅動并聯機器人一直是眾多學者關注的研究熱點之一。國內外已開展了多項關于柔索驅動的研究,并取得了一定的進展。
柔索驅動建模的難點在于柔索的建模。SHIANG等把柔索看做無質量的直線單元對三自由度索系并聯機器人進行了數值仿真[1],PHAM等利用數值仿真與數學分析相結合的方式研究了三自由度柔索驅動機器人[2]。到目前為止,柔索驅動的動力學建模還沒有形成一套完全令人滿意的方法。本文利用ADAMS通過仿真實驗建立了柔索模型和空間三自由度柔索驅動并聯機器人動力學模型,并利用數學分析和軟件仿真相結合的方法驗證了該模型的穩定性和合理性,提高了效率,簡化了計算。本文所建立的柔索驅動機器人數學模型在柔索建模方法上具有一定的通用性,為進一步研究柔索驅動并聯機器人動力學優化及控制奠定了基礎。
1 運動學與動力學分析
1.1 建立模型
并聯柔索機器人一般由驅動器、柔索傳動系統和執行機構組成。它用柔索代替傳統并聯機器人的連桿,從而在很大程度上降低了操作臂重量。由于柔索只能沿其軸向承受拉力,不能承受壓力,所以n根柔索并不能實現n個自由度位置的完全約束,至少需要n + 1條才能實現位置的完全約束,多出的1條或者多條用來保證機構中所有驅動柔索處于張緊狀態。
本文研究的空間三自由度柔索驅動并聯機器人,采用四根柔索驅動,其結構模型示意圖如圖1所示,從圖1中可知其結構參數共有四個,分別設為:
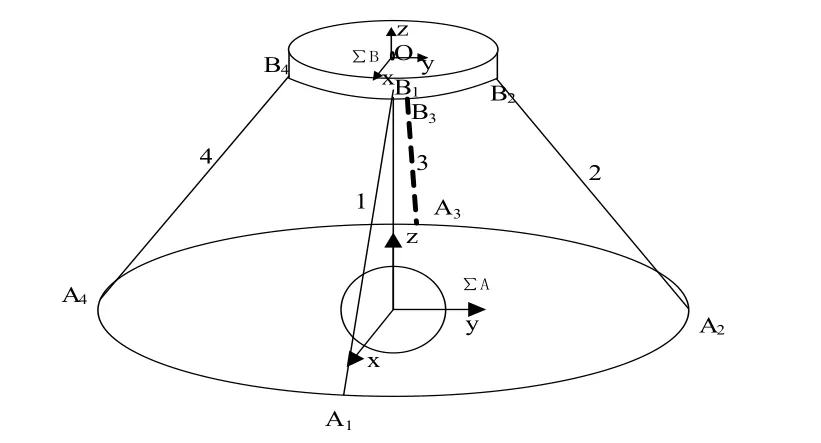
圖1 三自由度球關節模型示意圖
1)球關節支撐中心到動平臺的高度為h;
2)底座固定平臺的半徑為R;
3)運動平臺的半徑為r;
4)鋼絲繩與底座固定平臺和運動平臺的聯接點分別為Ai,Bi,i∈{1,2,3,4}。
1.2 靜力學與運動學分析
在進行仿真之前,首先要解決的是運動學正解問題[3,4]。本文研究對象為三自由度柔索驅動并聯機器人(如圖1所示),由4根柔索驅動。柔索的兩端分別連接在動平臺和底座上的點Bi和Ai(i=1,2,3,4)處。∑A和∑B分別為固聯在底座的基坐標系和動平臺的動坐標系。為了簡化計算,做如下假設∶
1)柔索與動平臺和底座的連接為理想球鉸;
2)除柔索之外,其他部件均為理想剛性;
3)柔索為線彈性。
操作臂的位置和姿態可以定義為齊次變換矩陣:
式中:R∈ R3×3和P∈ R3×1分別表示動坐標系相對基坐標系的旋轉變換矩陣和動坐標系坐標原點在基坐標系中的位置矢量。姿態矩陣則是具有9個元素的方向余弦矩陣,因此可用3個獨立變量來表示姿態矩陣。這三個變量分別取繞基坐標三個軸的轉角。則可以得到運動平臺相對于轉動前的姿態變換矩陣,如式(1)所示:

其中,R(X,a),R(Y',b)和R(Z'',g)分別是繞X,Y',Z''軸的基本旋轉變換矩陣,ca=cosa,sa=sin a。同理可以得到其他旋轉順序的旋轉矩陣。
這里設動平臺中心位置坐標為 c[ X,Y,Z],那么就可以將動平臺中的位姿表示為:

根據以上分析,下面推導其逆運動學方程,其逆運動學方程是指在已知機械臂末端位姿的條件下求解各驅動繩索的長度。
繩索的長度矢量用Li表示,則:

其中ai和bi分別表示第i(i=1,2,3,4)根柔索在∑A和∑B中連接點的矢量表示:
繩索的長度:

對式(3)求導可得到柔索的速度:


1.3 動力學分析
動平臺的位置可以通過歐拉方向角來唯一確定,令 x=[a,b,g]T根據拉格朗日方程建立系統的動力學方程:

其中,t=[t1,t2,t3,t4]T為柔索的張力矢量。JT系統的雅可比矩陣:

式(7)中riA和rBi分別為第i根柔索在坐標系∑A和∑B中的矢徑表示:

其中sa=sina ,ca=cosa。
2 仿真及結果分析
2.1 柔索可靠性分析
由于系統中加入了柔索,柔索只能受拉力而不能受壓力、彈性變形和非線性力學特性,使得并聯柔索機器人的建模變得相對困難。所以柔索模型的正確性在仿真中至關重要,本文基于ADAMS利用有限分割法把柔索看作是有限個有質量的小圓柱,通過bushing力連接來建立柔索模型。首先,我們要對一根鋼絲繩進行模擬仿真實驗,來確定柔索模型的相關參數。對于單根鋼絲繩的動力學仿真模型,其阻尼比主要受以下三個方面的影響[5~7]:
1)鋼絲繩的自由擺動姿態接近實際仿真情況,來確定阻尼比的值;
2)當鋼絲繩受力彎曲時,另一端連接到基底的受力應為0(鋼絲繩只能承受拉力,不能承受壓力);
3)在拉力的作用下,鋼絲繩的伸長量應與實際伸長量接近。
鋼絲繩模型的參數如下:有100段半徑為1mm長度為10mm的圓柱組成。其參數設置如下圖:
系統重力加速度為9.8N/kg,下面我們對這單根鋼絲繩進行仿真來證明這種方法建立的鋼絲繩模型是符合實際情況的。
仿真1:讓鋼絲繩在重力作用下自由擺動。仿真時間為5s,仿真步數為1000。鋼絲繩只在重力作用下的自由擺動姿態接近實際情況。
仿真2:把鋼絲繩的一端固定,另一端用滑動副連接并施加100m/s的速度,方向朝向固定端,在仿真剛開始,由于存在鋼絲繩的拉力,固定端受力為0.9761N,但是隨著鋼絲繩的彎曲固定端的受力迅速衰減至0,這接近實際情況。其受力變化如圖2所示。
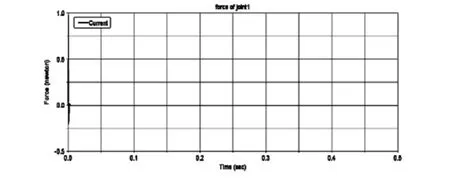
圖2 固定端受力變化
仿真3:在鋼絲繩的一端沿Y軸負方向施加一個1000N的力,來觀察鋼絲繩在Y軸方向上長度變化如圖3所示,長度為2001.667mm,其伸長量為1.667mm。而通過理論計算鋼絲繩的伸長量為1.6mm,鋼絲繩在X軸和Z軸的伸長量幾乎為0。其仿真誤差為4%,在許可范圍之內。
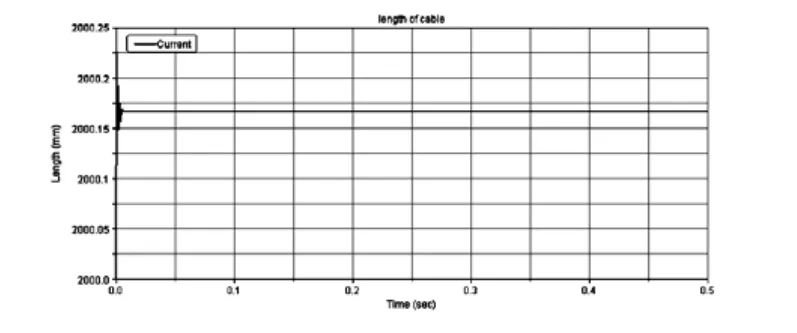
圖3 在Y軸施加力后柔索的長度變化
經實驗驗證得到ADAMS中柔索模型bushing力的剛度和阻尼比分別為59346和1。
2.2 模型驗證
如圖1所示三自由度柔索并聯驅動機器人的相關參數如下:R=500mm,r=100mm,h=1000mm畫出三自由度球關節的三維運動學模型,結合上述分析,通過編制cmd程序來建立鋼絲繩模型[8]。該機構的三維模型如圖4所示。
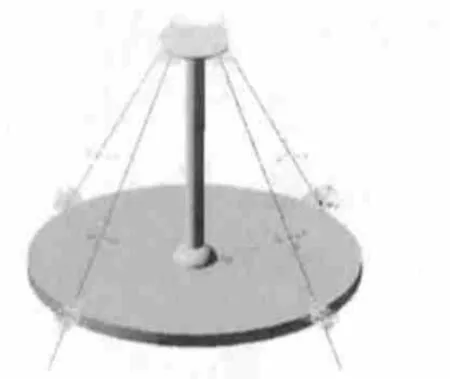
圖4 三自由度柔索并聯驅動機器人三維模型
因為鋼絲繩不能夠承受壓力,所以這里的平移副和球鉸副的摩擦力設置為零,同時,每根鋼絲繩上施加預緊力τ(方向沿鋼絲繩),以保證鋼絲繩始終處于張緊狀態。對上述三自由度并聯柔索驅動機器人,在各驅動繩上施加相應的控制力,可使運動平臺在相應的控制力作用下,到達指定位置。以此來驗證模型的合理性和正確性。
動平臺中心運動軌跡:

根據動力學分析,可以計算出動平臺在沿軌跡運動過程中的速度變化、繩長的變化和力的變化,然后將所計算的力的數據以sp1ine的形式導入到adams中,來控制動平臺運動,通過仿真可以得到動平臺位置變化曲線圖5和柔索長度變化曲線圖6。仿真時間為5s,step=1000。由圖5可知,動平臺上端中心的運動曲線與數學分析所得的值在x,y,z軸方向的最大誤差分別為0.328mm、0.632mm、1.056mm,最大誤差小于1%。仿真結果與數學計算結果基本一致,進一步驗證了所建模型的合理性。
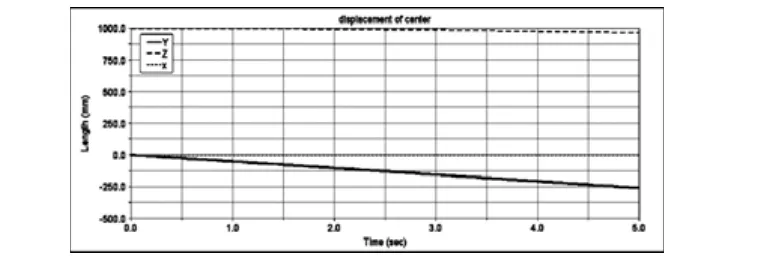
圖5 動平臺中心的位移
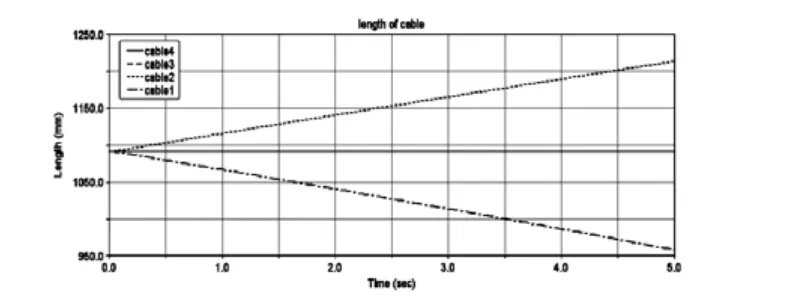
圖6 四根繩索的長度變化
從圖6的仿真曲線中可以看出,在運動過程中,繩索2的伸長量最大,繩長變化從1081.6769mm到1197.3076mm;繩索1的收縮量最大,繩長變化從1081.6769mm到955.6774mm;繩索3、4長度幾乎沒有變化。這種情況與運動軌跡的描述是一致的。仿真結果表明,該機構在沿預定軌跡運動時,整體運動平滑和穩定,所建模型合理、有效。
3 結束語
本文設計了一種空間三自由度柔索驅動并聯機器人模型,并用數學分析和軟件仿真方法對其進行了研究,結論如下:
1)把柔索看作是有限個有質量的小圓柱通過bushing力連接,建立柔索的動力學模型,結果表明,該柔索模型與實際情況。比較接近。該方法具有一定的通用性,為空間三自由度柔索驅動并聯機器人的控制奠定了基礎,并為其他柔索驅動系統的動力學模型的仿真提供了理論參考。
2)通過數學分析和ADAMS軟件仿真相結合的方法來研究柔索問題,具有一定的有效性;
3)該機構整體結構較為簡單、重量輕、實用性強、便于組裝和維護、能夠產生較大的工作空間,同時其運動學計算簡單,易得出顯式表達式,從而易于實時控制。適用于空間作業。
[1] SHANG W J. CANNON D,GORMAN J. Dynamic ana1ysis of the cab1e array robotic crane[C]//Proc,of IEEE Int.Conf. on Robotics and Automation,May 10-15,1999,Detroit,Michigan,USA.Michigan;IEEE,1999∶2495-2500.
[2] PHMA C B,YEO S H,YANG G L,et a1.Force-c1osure workspace ana1ysis of cab1e-driven para11e1 machanisms[J].Mechansim and Machine Theory,2006,41(1)∶53-69.
[3] S Kawamura,H Kino,C Won. High-speed manipu1ation by using para11e1 wire-driven robots. Robotica,2000,18(1)∶13-21.
[4] Maeda K.,Tadokoro S.,Takamori T. On design of a redundant wire- driven para11e1 robot WARP manipu1ator.Proceedings of the 1999 IEEE internationa1 conference on robotics & automation,1999∶895-900.
[5] 周煒,易建軍,鄭建榮.ADAMS軟件中繩索類物體的一種建模方法[J].現代制造工程,2004,5∶38-39.
[6] 袁志剛,臧鐵剛.基于ADAMS平臺的鋼索系列物體建模環境的研究[M].制造業信息化,2007∶82-84.
[7] 晉民杰,劉華偉,裴培,馮振華.基于 ADAMS 宏程序的礦井提升機鋼絲繩建模研究[J].礦山機械2011,39(12).
[8] 劉紅軍,趙帥,魏英姿.一種剛柔結合并聯機構及其動力學分析.制造業自動化,2009,12∶166-168.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
