新型微型管道機器人結構設計及其運動可行性分析
2013-11-19 09:27:18朱永梅孫小艷
江蘇科技大學學報(自然科學版) 2013年4期
關鍵詞:設計
朱永梅, 孫小艷, 張 超
(江蘇科技大學 機械工程學院,江蘇 鎮江 212003)
微型管道作為一種特殊的運輸工具無論是在日常生活還是生產中都得到廣泛地應用,然而受管道使用可靠性以及管道壽命等因素的影響,管道事故變得越來越常見.基于此,微型管道機器人應運而生.目前,現有的微型管道機器人形式各式各樣,按其行走方式可以分為:輪式(包括直進輪式和螺旋輪式)、足式、履帶式、張緊式以及蠕動式[1-4]等.
國內外關于微型管道機器人都有相關研究,例如,文獻[5]根據蚯蚓生物學的運動機理研制了結構簡單的微小管道機器人,該機器人采用步進電機驅動,控制簡單;文獻[6]設計了一種無纜管道機器人,該機器人由發電部分、支撐輪組件和導向機構三大部分組成,采用高速51單片機AT89S52配合可編程器件(CPLD)EPM7128來進行控制,但此機器人僅限于進行遠距離的運行作業;文獻[7]設計了蠕動式的微小管道機器人,機器人由微型的直流電動機和微型行星齒輪減速器組合驅動,總體上實現了微型化(φ13 mm×200 mm),但設計的支撐結構不夠靈活,控制性能較差;文獻[8-9]研制了一種仿尺蠖微小管道機器人,機器人的移動速度隨氣壓值和管道直徑的增大而增大,在直徑為16 mm的管道內通入氣體的氣壓為2.0 Pa時其速度最大可達50 mm/s.盡管國內外關于微型管道機器人都有一些研究,但是微型管道機器人的設計研究尚未走向成熟,還存在各自的缺陷,并不能適應一定范圍或類型的管道.因而,進一步對微型管道機器人進行研究開發勢在必行.文中設計了一種微型步進電機驅動的蠕動-張緊式微型管道機器人,綜合了蠕動和張緊這兩種機器人的優良性能,能夠平穩的運行于管徑范圍為25~40 mm的管道.
1 微型管道機器人總體方案設計
根據具體的設計參數以及實現機器人在復雜管道內行走等設計要求,設計的微型管道機器人主要由三部分組成:前箝位(張緊)機構、后箝位機構以及連續蠕動驅動體(圖1).
前后箝位機構為對稱機構,主要有步進電動機、絲杠螺母、3個對稱分布的張緊輪、越障彈簧以及由連桿組成的呈120o分布的支撐腿,整體呈傘狀結構.該部分能夠滿足微型管道機器人實現基本行走的條件,即形封閉和力封閉(輪腿實現了與管壁的3點支撐),同時它還能實現越障以及適應一定管徑變化等功能.
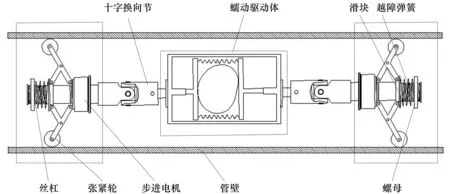
圖1 微型管道機器人方案Fig.1 Micro in-pipe robot sheme figure
中間部分為連續蠕動驅動體,該蠕動機構與以往的機械蠕動機構不同.以往所設計的蠕動機構一般為電機帶動絲杠螺母分步實現前后箝位機構的前進和后退,蠕動進度異常緩慢.該微型管道機器人的蠕動機構能夠實現連續驅動,提高了機器人的運行效率.十字換向節的使用保證了機器人能夠順利地通過彎道,大大提高了機器人的適應能力.
微型管道機器人的運動原理為:前后箝位機構在步進電機帶動絲杠螺母的作用下使得各自的3條支撐腿張緊,從而保證3個對稱分布的輪子與管壁有一定的附著力,待前后箝位機構張緊后(即與管壁產生約束作用),中間部分的蠕動驅動體開始工作,帶動機器人整體連續向前或向后行走.
2 微型管道機器人結構設計
2.1 蠕動驅動體的設計
為保證機器人有一定的牽引力和運行速度,設計了兩種蠕動移動機構.第1種機構(圖2a))為利用彈簧力作用的力鎖合凸輪結構,同時利用了平底凸輪機構受力好、潤滑好并且傳動速度大等優點;第2種機構(圖2b)為形鎖合的簡單等寬凸輪結構,該機構貫穿了以簡單、設計方便的結構來實現復雜運動的總體設計思想.凸輪結構簡單、緊湊、設計方便,而且只要設計合理適當的凸輪輪廓曲線,便能夠獲得需要的從動件運動規律.所以以上兩種機構都能夠保證機器人實現一定規律的運動,并且實現機器人總體結構的簡單化和緊湊化.
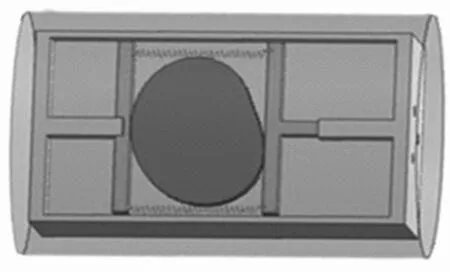
a) 基于力鎖合凸輪的蠕動體結構
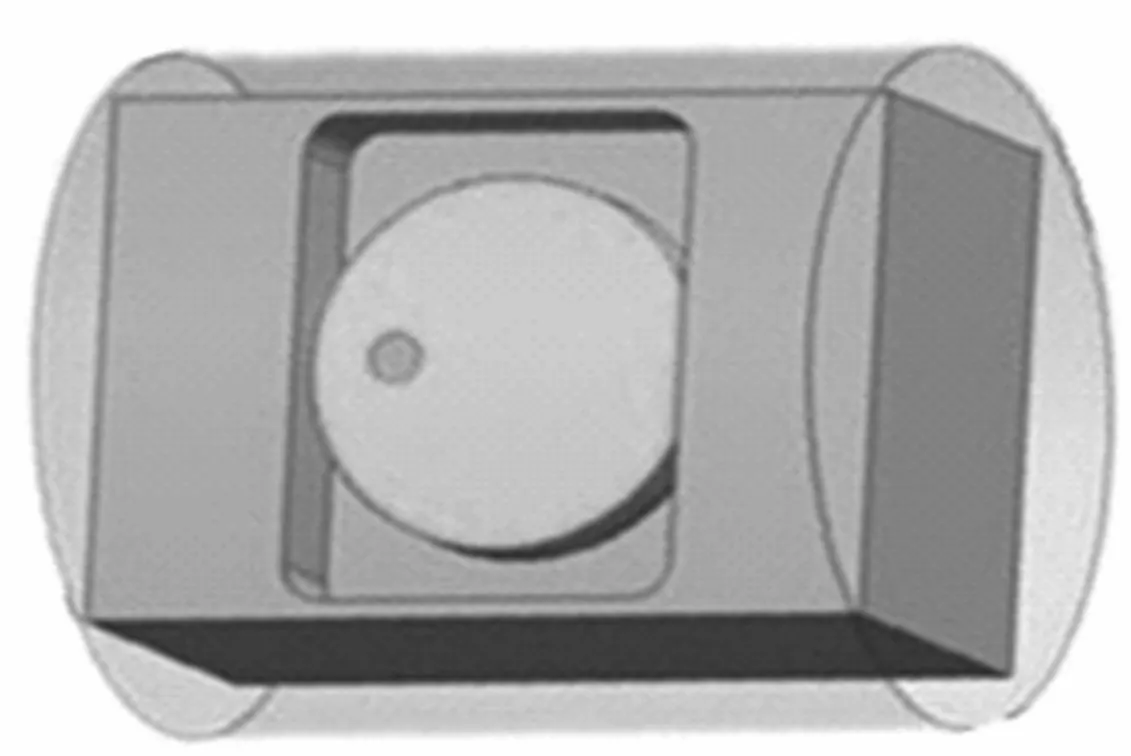
b) 基于形鎖合凸輪的蠕動體結構
2.2 力鎖合凸輪結構的設計
1)推桿運動規律的選擇
多項式函數具有連續性,且其導數仍為多項式,因而采用多項式運動規律,容易獲得高階連續性,所以從動件采用多項式運動規律來設計凸輪的結構.根據初始條件得到推桿的運動規律為:
根據上式得到推桿的運動規律曲線如圖3.
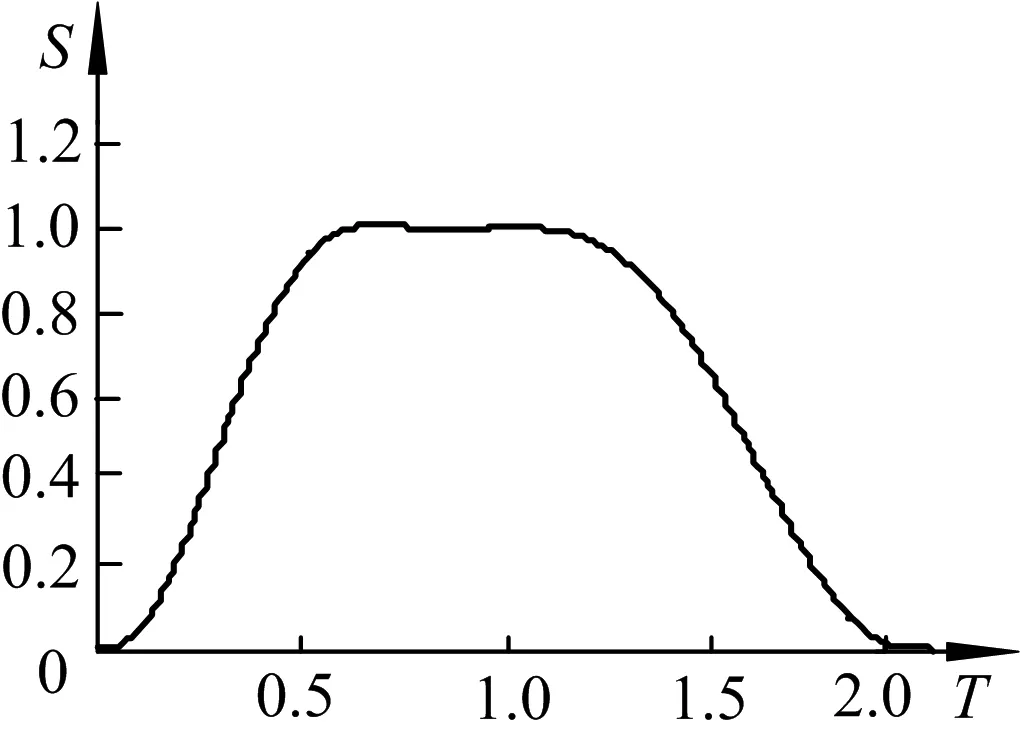
a) 無量次化運動規律曲線
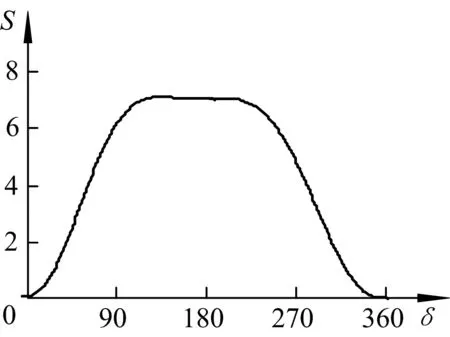
b) 運動規律曲線
為清晰地分析該種運動規律的性能,繪制其SVAJ曲線(圖4).
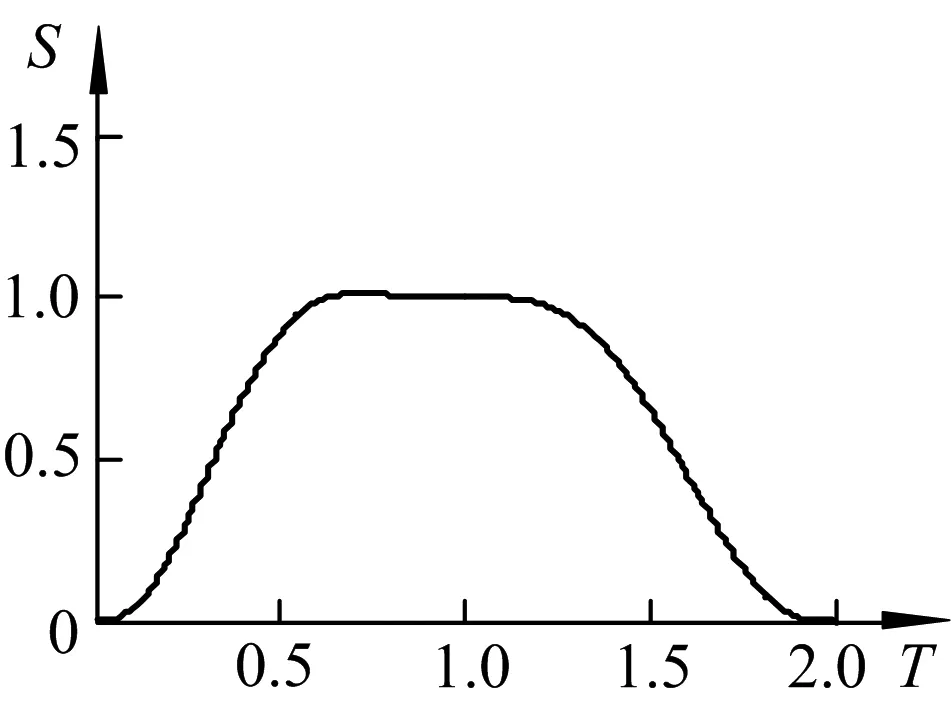
a) 位移曲線

b) 速度曲線
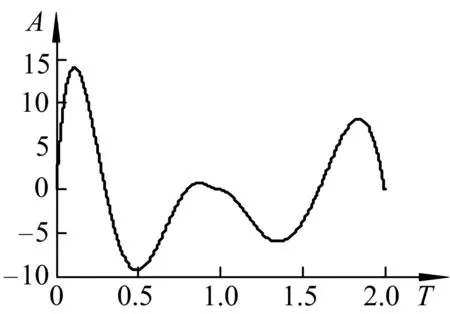
c) 加速度曲線
d) 躍度曲線
2) 凸輪輪廓線的設計
凸輪輪廓線的設計采用ADAMS/VIEW提供的應用相對軌跡曲線生成實體的方法來進行.先采用30×30×3的板來代替凸輪,并在代凸輪上施加一旋轉副,在推桿上定義一滑移副.為得到凸輪輪廓曲線,分別在滑移副和旋轉副上施加如圖5所示的驅動,并定義相應的函數.
在進行一次運行仿真后,通過Creat Trace Spline菜單項得到凸輪的輪廓曲線如圖5b).
以上即為力鎖合凸輪機構的設計.形鎖合凸輪機構的設計大同小異,但是形鎖合凸輪在運作過程中存在橫越沖擊現象,會增大振動,影響定位精度,又偏心輪在作業過程中會有很大的甩動,影響機器人的運動穩定性,同時形鎖合顧名思義,其驅動性能會受到其幾何形狀的影響,不利于機器人的微小化,所以這里采用第1種機構也就是力鎖合機構來作為驅動.
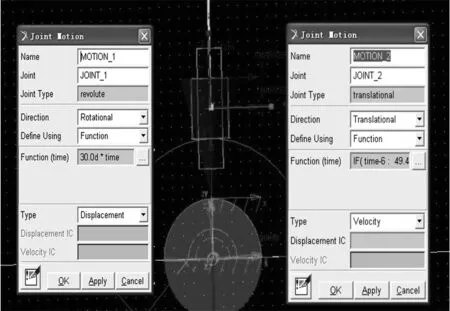
a) 驅動函數的定義
b) 凸輪輪廓線
2.3 箝位機構的設計
箝位機構的結構原理圖如6,為使微型管道機器人實現在封閉狹窄空間里靈活可靠行走,該部分的設計應滿足以下設計要求:①滿足尺寸限制的要求;②靈活可靠的啟停;③能夠越過一定的障礙;④具有一定的穩定性.
根據管徑要求為25~40 mm,來設計3條支撐輪腿的尺寸為:a=c=8 mm,b=5 mm,r=3 mm.同時為滿足尺寸限制的要求,該部分所設計的步進電機、螺母以及滑塊的尺寸也不能夠太大.
為使管道機器人穩定行走,設計呈120°分布的3條支撐腿,即保證了微型管道機器人與管壁之間實現了3點支撐.由于受步進電機步距角以及細分等因素的影響,管道機器人徑向的調節精度并不是很高,如當機器人遇到小的障礙時,僅僅在絲杠螺母的調節下不能保證輪腳與管壁的有效張緊,這時設計了越障彈簧,從而實現微型管道機器人的有效越障和平穩運行.
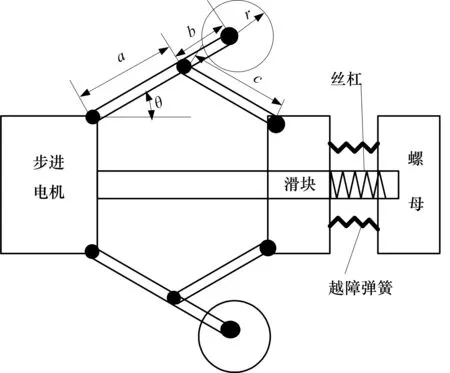
圖6 箝位機構原理Fig.6 Ground-clamp institution principle diagram
3 動力學分析及虛擬樣機仿真
3.1 動力學建模
微型管道機器人系統可以分為3個子系統,下面對其主要作用的蠕動驅動子系統進行動力學分析,對系統進行構件質量集中化處理,得到動力學模型(圖7).其中:k為彈簧的剛度系數,k0為凸輪與推桿的接觸剛度,k1為推桿的拉伸剛度,k2為推桿與機架的接觸剛度,m11,m12為推桿等效質量,m11+m12=m1為推桿的質量,m2為機架質量,S為凸輪對推桿產生的理論位移.
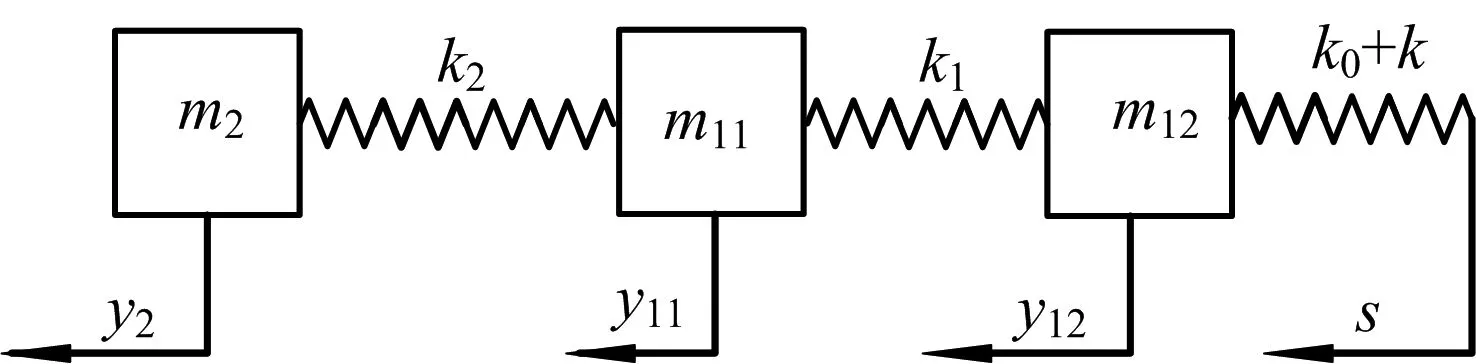
圖7 蠕動驅動子系統的動力學模型Fig.7 Peristalsis subsystem dynamic model
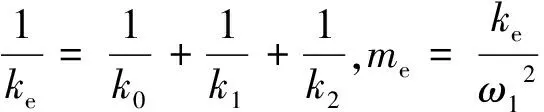
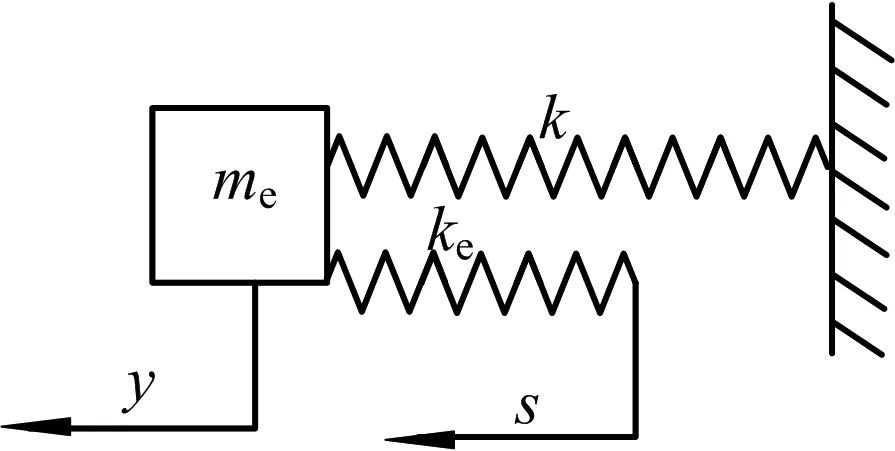
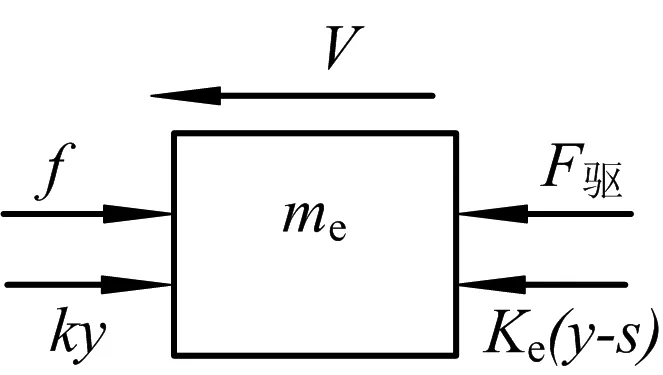
圖8 等效單自由度動力學模型Fig.8 Equivalent single-degree-of-fredom dynamic model
根據模型建立動力學方程
3.2 虛擬樣機仿真
3.2.1 幾何建模
在進行運動分析計算之前,首先利用UG對微型管道機器人進行三維建模以及裝配,最終得到如圖9所示的三維模型.

圖9 機器人三維模型Fig.9 Robot 3D model
將UG建立的prt文件導出為.x-t類型文件,即parasolid實體模型,然后將其導入ADAMS進行總體的運動學及動力學分析.
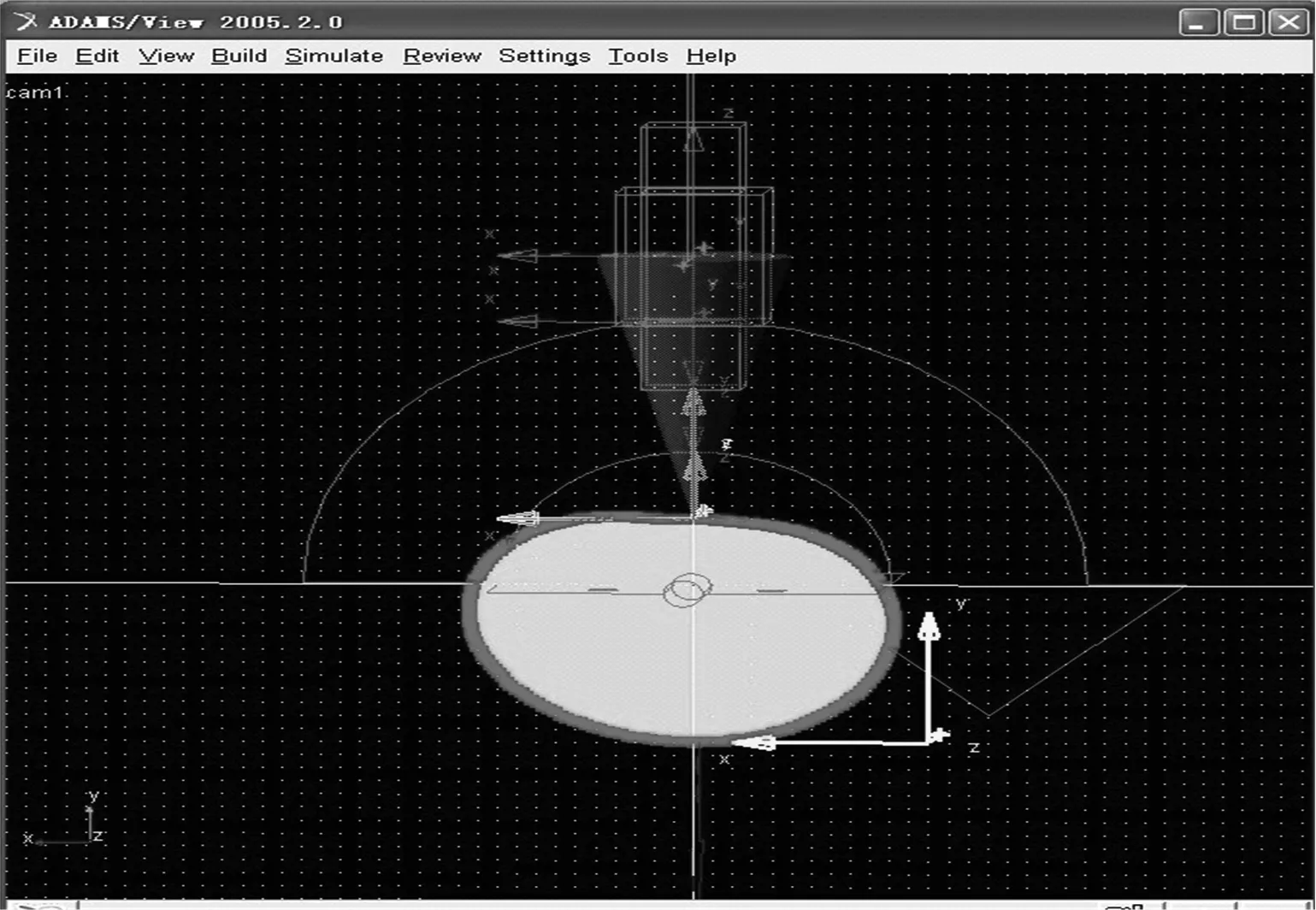
3.2.2 編輯構件
對于從三維軟件導入ADAMS的幾何模型,需要編輯構件的屬性和構成構件元素的屬性,如顏色、位置、名稱和材料屬性等.尤其是材料屬性,否則在計算仿真的過程就會出現錯誤的信息.這里定義中間架,凸輪以及推桿為耐磨質量較輕的硅鋁合金,由于其不屬于ADAMS的標準材料庫,需要自定義其彈性模量為6.89E+004、泊松比為0.33、密度為2.8E-006,同理定義6個輪子為橡膠材料(彈性模量為7.8,泊松比為0.47,密度為9.3E-007),其它的均定義為標準材料庫中的剛材料.同時修改模型的外觀以及名稱最終得到管道機器人在ADAMS環境中的姿態(圖10).
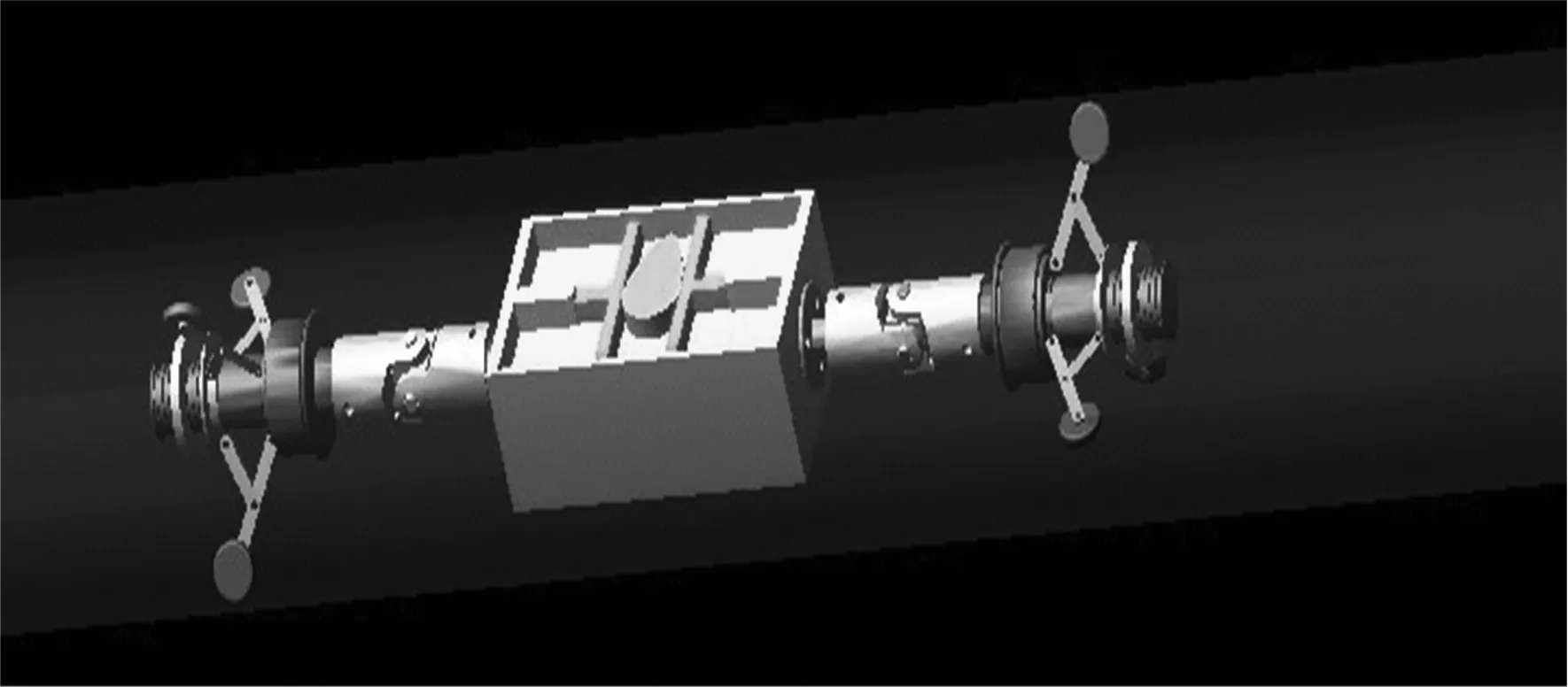
圖10 機器人的虛擬樣機設計Fig.10 Robot virtual prototype design
3.2.3 約束建模
為模擬系統的真實運動情況,根據實際情況抽象出相應的滑移副、螺旋副、旋轉副等運動副,同時為使系統運動起來在運動副上添加了驅動和載荷,以及在構件間施加了載荷.對微型管道機器人系統添加了11個滑移副,9個旋轉福,2個螺旋副;施加了3個旋轉電機驅動,4對接觸載荷以及2個彈簧來進行虛擬樣機仿真.
3.2.4 結果分析
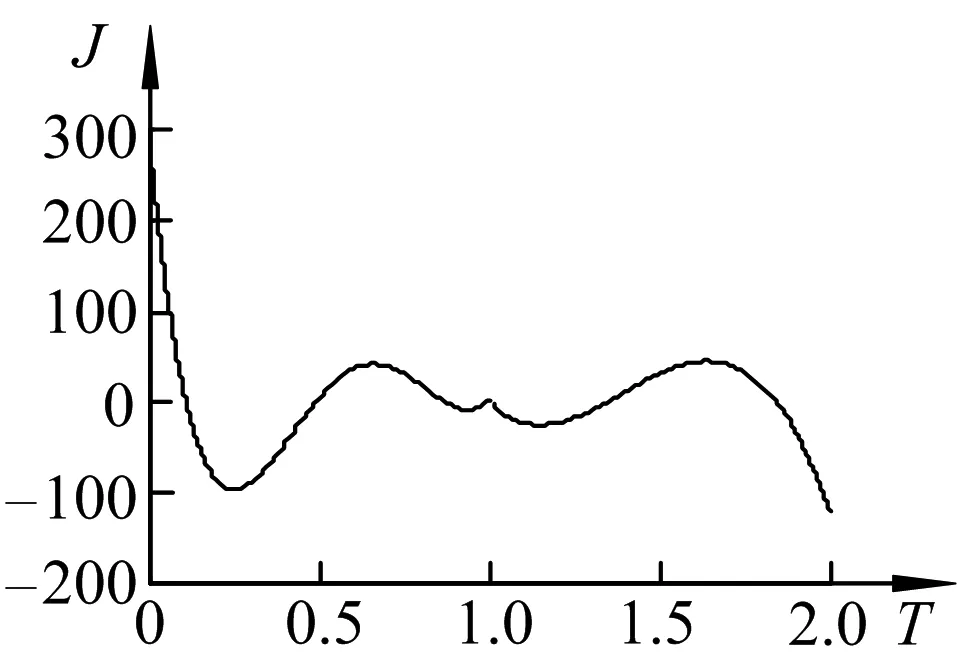
經過仿真分析計算,得到如圖11的結果.
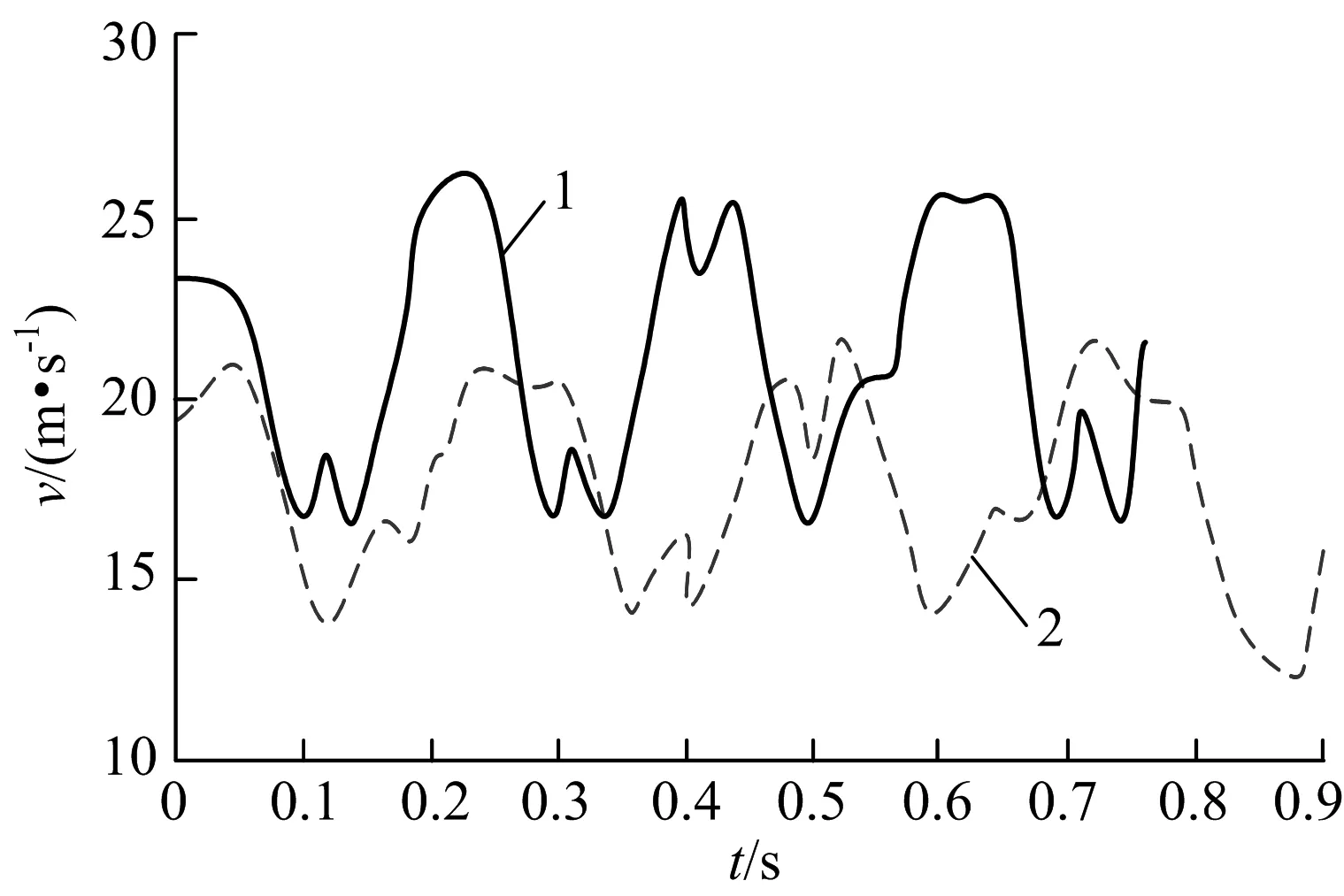
圖11 運動學分析曲線Fig.11 Kinematics analysis cure
圖中曲線1代表電機轉速為1 200 r/m時微型管道機器人運動仿真結果,微型管道機器人的速度最大可以達到27.2 mm·s-1.通過仿真分析可以看出最后機器人整體的運動規律基本上接近多項式運動規律,即避免了剛性沖擊和柔性沖擊,實現了機器人的穩定可靠行走.曲線2為電機轉速為900 r/m時的運動仿真結果,明顯在該驅動下其速度要小的多,整體運動性能不如在高速驅動下的好.通過在兩種初始條件下的仿真以及對最后仿真結果的分析,機器人在個別運動周期內(如曲線1的0.4~0.5 s時間周期)會出現微小的速度波動,這將導致運動副中動壓力的增加,降低機械的壽命、工作質量和效率.所以為提高其運動性能,有必要對其進行提高和優化.
4 結論
通過對國內外相關文獻的研究,綜合分析現有微型管道機器人的研究現狀,文中設計了一種新型的結構簡單的蠕動-張緊式微型管道機器人.首先,確定了機器人的總體方案,主要由3個部分組成,并對其主要的結構進行了設計,尤其是起重要作用的凸輪部分的設計,為獲得良好的運動性能采用了多次多項式運動規律;最后,對機器人進行了動力學分析和虛擬樣機仿真,驗證了其運動可行性.最終設計的管道機器人能夠運行于管徑為25~40 mm,曲率半徑小于115 mm的管道內,最大速度可達到27.2 mm/s.
[1] 徐從啟,解旭輝,戴一帆,等.微小管道機器人適應不同管徑的3種調節機構的力學分析[J].機械科學與技術,2008,27(10):1145-1148.
Xu Congqi,Xie Xuhui,Dai Yifan,et al.Dynamic analysis of three regulating mechanisms for a micr in-pipe robot adaptable to different pipe diameters[J].MechanicalScienceandTechnologyforAerospaceEngineering, 2008,27(10):1145-1148. (in Chinese)
[2] 官長斌,陳娟.一種新型蠕動式管道機器人結構設計[C]//第五屆全國流體傳動與控制學術會議論文集.2008,10:398-402.
[3] Zhao Yuxia,He Guangping,Gao Dewen,et al.Micro in-pipe robot mechanical structure design of shape memory alloy driving[C]//Proceedingsofthe2009IEEEIternationalConferfenceonRoboticsandBiomimetics.USA:IEEE,2009:360-365.
[4] 李偉,于連國,王妍瑋. ADAMS在虛擬樣機仿真分析中的應用[J].機電產品開發與創新,2010,23(3):96-97.
Li Wei, Yu Lianguo,Wang Yanwei. New box-type dryer design based on ADAMS[J].Development&InnovationofMachinery&ElectricalProducts, 2010,23(3):96-97. (in Chinese)
[5] 左建勇,顏國正.用于腸道檢查的微小型蠕動機器人[J].上海交通大學學報,2004,38(8):1310-1313.
Zuo Jianyong, Yan Guozheng. A miniature creeping robot for intestinal inspection[J].JournalofShanghaiJiaotongUniversity,2004,38(8):1310-1313.(in Chinese)
[6] 黃明偉.新型無纜管道機器人的初探[D].廣東廣州:廣東工業大學,2006:12-13,23-24.
[7] 王宏剛.微小管道機器人結構設計及動力學分析[D].長沙:國防科技大學,2007:46-47.
[8] Jinwan Lim,Hyunjun Park,Sunmoo Moon,et al.Pneumatic robot based on inchworm motion for small diameter pipe inspection[C]∥Proceedingsofthe2007IEEEInternationalConferenceonRoboticsandBiominmetica.USA:IEEE,2007:330-335.
[9] Jinwan Lim,Hyunjun Park,Jaemin An,et al.One pneumatic line based inchworm-like micro robot for half-inch pipe inspection[J].Mechatronics,2008,18:315-322.
[10] Yuichi Nakazato,Yukihiro Sonobe,Shigeki Toyama,et al.Development of an in-pipe micro mobile robot using periatalsis motion[J].JournalofMechanicalScienceandTechnology,2010,24:51-54.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04