基于速度預(yù)估控制的電驅(qū)動(dòng)系統(tǒng)動(dòng)態(tài)測(cè)試
2013-11-22 07:51:24劉忠途宗志堅(jiān)
微特電機(jī) 2013年9期
劉忠途,劉 亢,宗志堅(jiān)
(中山大學(xué),廣東廣州510006)
0 引 言
電動(dòng)汽車(chē)是未來(lái)汽車(chē)行業(yè)的發(fā)展方向[1],電力驅(qū)動(dòng)及其控制技術(shù)是目前電動(dòng)汽車(chē)研究的三項(xiàng)關(guān)鍵技術(shù)之一[2-3],驅(qū)動(dòng)系統(tǒng)的性能直接影響了汽車(chē)動(dòng)力性的優(yōu)劣,因此需要在電動(dòng)汽車(chē)設(shè)計(jì)之初對(duì)電驅(qū)動(dòng)系統(tǒng)進(jìn)行選型與測(cè)試。
傳統(tǒng)的電驅(qū)動(dòng)測(cè)試采用穩(wěn)態(tài)測(cè)試方法[4]。假定汽車(chē)按照循環(huán)工況行駛,通過(guò)汽車(chē)各部件模型參數(shù)離線(xiàn)計(jì)算出汽車(chē)所受負(fù)載與電機(jī)軸系的轉(zhuǎn)速響應(yīng),以此作為測(cè)試系統(tǒng)的轉(zhuǎn)矩與轉(zhuǎn)速輸入,此方法能夠?qū)﹄婒?qū)動(dòng)系統(tǒng)進(jìn)行性能與安全性測(cè)試,但存在以下不足:(1)屬于準(zhǔn)靜態(tài)的仿真,對(duì)驅(qū)動(dòng)系統(tǒng)的瞬態(tài)變化過(guò)程不予考慮;(2)理性化,測(cè)試前提是假定能夠達(dá)到工況的要求,無(wú)法對(duì)加速、制動(dòng)時(shí)驅(qū)動(dòng)系統(tǒng)的性能進(jìn)行測(cè)試;(3)未考慮駕駛員的行駛意圖。這些缺點(diǎn)使得穩(wěn)態(tài)測(cè)試已不能滿(mǎn)足電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)的研制與開(kāi)發(fā),無(wú)論是動(dòng)力學(xué)、經(jīng)濟(jì)性研究都要求對(duì)驅(qū)動(dòng)系統(tǒng)進(jìn)行動(dòng)態(tài)的測(cè)試,以模擬驅(qū)動(dòng)系統(tǒng)真實(shí)的運(yùn)行情況。
交流電力測(cè)功機(jī)與高性能的模塊化控制儀器平臺(tái)出現(xiàn)將動(dòng)態(tài)測(cè)試變?yōu)榭赡埽ㄟ^(guò)高速現(xiàn)場(chǎng)總線(xiàn)同步驅(qū)動(dòng)電機(jī)與電力測(cè)功機(jī)的控制,利用電慣量模擬技術(shù)真實(shí)再現(xiàn)汽車(chē)的運(yùn)動(dòng)過(guò)程[5-7]。為了提高動(dòng)態(tài)跟蹤精度,對(duì)測(cè)試系統(tǒng)進(jìn)行了速度預(yù)估控制,利用反饋調(diào)節(jié)減小了系統(tǒng)中存在的非線(xiàn)性擾動(dòng),獲得了良好的效果。
1 電驅(qū)動(dòng)測(cè)試系統(tǒng)構(gòu)成
測(cè)試系統(tǒng)主要由電動(dòng)汽車(chē)用驅(qū)動(dòng)電機(jī)及控制器、交流電力測(cè)功機(jī)、汽車(chē)仿真模型、電磁轉(zhuǎn)矩觀(guān)測(cè)器、轉(zhuǎn)速預(yù)估模塊、轉(zhuǎn)速傳感器、傳動(dòng)軸等組成,系統(tǒng)結(jié)構(gòu)如圖1 所示。
駕駛員根據(jù)車(chē)輛行駛狀況發(fā)出驅(qū)動(dòng)指令Tref及制動(dòng)指令TL,控制電驅(qū)動(dòng)系統(tǒng)提供動(dòng)力Ttq,交流測(cè)功機(jī)則為驅(qū)動(dòng)電機(jī)模擬行駛阻力與制動(dòng)力。工作過(guò)程中,將采集到的轉(zhuǎn)速信號(hào)ωr、電磁轉(zhuǎn)矩觀(guān)測(cè)器通過(guò)采集電機(jī)電流信號(hào)Id、Iq及磁鏈ψf觀(guān)測(cè)到的電磁轉(zhuǎn)矩輸入至汽車(chē)仿真模型,實(shí)時(shí)計(jì)算汽車(chē)的行駛阻力,以求得此狀態(tài)汽車(chē)的加速特性,經(jīng)速度預(yù)估控制測(cè)功機(jī)輸出負(fù)載轉(zhuǎn)矩Tload使得系統(tǒng)轉(zhuǎn)速變化與期望轉(zhuǎn)速一致。

圖1 測(cè)試系統(tǒng)結(jié)構(gòu)圖
由于測(cè)試系統(tǒng)的轉(zhuǎn)動(dòng)慣量遠(yuǎn)小于汽車(chē)的等效轉(zhuǎn)動(dòng)慣量,傳動(dòng)軸的轉(zhuǎn)速會(huì)在負(fù)載轉(zhuǎn)矩的作用下迅速下降,傳統(tǒng)的試驗(yàn)臺(tái)通常采用機(jī)械慣性飛輪組模擬汽車(chē)的等效轉(zhuǎn)動(dòng)慣量,這種技術(shù)比較成熟,但也有一些缺點(diǎn),需要精確對(duì)汽車(chē)慣量進(jìn)行折算、質(zhì)量固定使得適用車(chē)型較少、噪聲振動(dòng)大且拆卸復(fù)雜。而采用電模擬的試驗(yàn)臺(tái)則取消了機(jī)械慣性飛輪,通過(guò)控制負(fù)載電機(jī)的輸出轉(zhuǎn)矩以補(bǔ)償臺(tái)架系統(tǒng)慣量與汽車(chē)慣量的差別,使得在動(dòng)態(tài)過(guò)程中傳動(dòng)軸的轉(zhuǎn)速變化與機(jī)械模擬系統(tǒng)基本一致。
2 電慣量模擬原理
電動(dòng)汽車(chē)克服行駛阻力運(yùn)行時(shí),驅(qū)動(dòng)電機(jī)提供驅(qū)動(dòng)力,經(jīng)由傳動(dòng)系傳輸至車(chē)輪,在進(jìn)行慣量模擬時(shí),要求電慣量系統(tǒng)的速度必須與真實(shí)汽車(chē)運(yùn)行的速度曲線(xiàn)保持一致;而且由于汽車(chē)慣量與測(cè)試系統(tǒng)相差很大,相同的驅(qū)動(dòng)力會(huì)造成不同的加速度響應(yīng),因此電慣量測(cè)試系統(tǒng)必須和真實(shí)汽車(chē)運(yùn)行的加速特性一致,這樣才能準(zhǔn)確地模擬電動(dòng)汽車(chē)的行駛過(guò)程。
汽車(chē)折算到電機(jī)轉(zhuǎn)軸上的等效轉(zhuǎn)動(dòng)慣量為Jvehicle,由動(dòng)量矩定理可將汽車(chē)運(yùn)動(dòng)方程表示:

對(duì)于永磁同步電機(jī)驅(qū)動(dòng)的電動(dòng)汽車(chē):

式中:Te為驅(qū)動(dòng)電機(jī)輸出的電磁轉(zhuǎn)矩,p、ψf、Ld、Lq分別為永磁同步電機(jī)的極對(duì)數(shù)、永磁體磁鏈、d 軸與q 軸電感,則Te可通過(guò)對(duì)d 軸與q 軸電流Id、Iq的采集來(lái)觀(guān)測(cè);Tload為驅(qū)動(dòng)電機(jī)輸出軸受到的負(fù)載轉(zhuǎn)矩,由汽車(chē)行駛阻力矩與制動(dòng)力矩決定;αvehicle為驅(qū)動(dòng)電機(jī)輸出軸的角加速度,數(shù)值上等于輸出軸角速度ωvehicle對(duì)時(shí)間的微分。
忽略粘滯摩擦力,對(duì)于臺(tái)架測(cè)試系統(tǒng):

式中:TL為被測(cè)驅(qū)動(dòng)電機(jī)輸出軸受到的負(fù)載轉(zhuǎn)矩,由測(cè)功機(jī)提供;α 與ω 為傳動(dòng)軸的角加速度與角速度。根據(jù)電慣量模擬的原理,需要使測(cè)試系統(tǒng)同真實(shí)汽車(chē)具有相同的速度與加速度,由式(1)、式(3)可得:
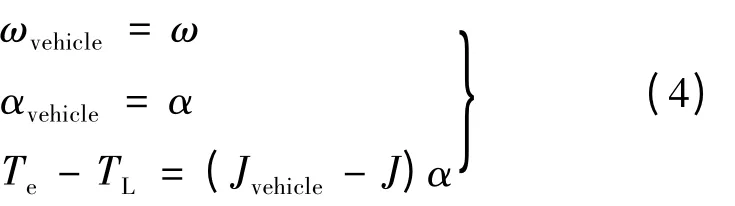
測(cè)功機(jī)提供額外的轉(zhuǎn)矩:Ts= Jsα = (Jvehicle-J)α 用于補(bǔ)償真實(shí)汽車(chē)同測(cè)試系統(tǒng)慣量差Js的影響。
3 速度預(yù)估控制
交流電機(jī)存在著高階、多變量、非線(xiàn)性的特點(diǎn),其精確的數(shù)學(xué)模型難以建立,而測(cè)試臺(tái)架中也存在著許多干擾(如電磁干擾、非線(xiàn)性摩擦等)對(duì)負(fù)載轉(zhuǎn)矩產(chǎn)生影響,單純通過(guò)電慣量的換算進(jìn)行補(bǔ)償往往不能達(dá)到很好的模擬精度。而對(duì)測(cè)功機(jī)進(jìn)行速度預(yù)估控制,利用臺(tái)架轉(zhuǎn)速的反饋對(duì)測(cè)功機(jī)的轉(zhuǎn)矩輸出Ts進(jìn)行調(diào)節(jié),使其同時(shí)對(duì)慣量與系統(tǒng)干擾進(jìn)行補(bǔ)償,高速的控制指令周期使得測(cè)試系統(tǒng)的轉(zhuǎn)速與加速度能夠快速跟隨汽車(chē)模型的要求。
3.1 前向仿真結(jié)構(gòu)
無(wú)風(fēng)天氣、正常道路上的汽車(chē)行駛方程式:

式中:Ttq為驅(qū)動(dòng)力矩;ig為變速器傳動(dòng)比;i0為主減速器傳動(dòng)比;ηT為系統(tǒng)效率;r 為輪胎半徑;G 為車(chē)重;f 為滾動(dòng)阻力系統(tǒng);α 為坡度;A 為迎風(fēng)面積;CD為空氣阻力系數(shù);δm為旋轉(zhuǎn)質(zhì)量換算系數(shù);uα為行駛車(chē)速。
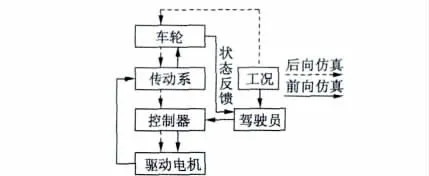
圖2 電動(dòng)汽車(chē)仿真結(jié)構(gòu)
按照控制信號(hào)與能量流傳遞路線(xiàn)的不同,可將電動(dòng)汽車(chē)仿真結(jié)構(gòu)劃分為后向與前向兩種[8],如圖2 所示。后向仿真建立于穩(wěn)態(tài)的基礎(chǔ)上,假定車(chē)輪轉(zhuǎn)速與加速度與工況保持一致,計(jì)算出動(dòng)力部件應(yīng)提供的轉(zhuǎn)矩作為指令信號(hào)輸入控制器,控制器控制驅(qū)動(dòng)電機(jī)實(shí)現(xiàn)控制過(guò)程,此過(guò)程與現(xiàn)實(shí)不符合;而前向仿真引入了駕駛員模型,根據(jù)工況需求與仿真反饋的偏差實(shí)時(shí)調(diào)整油門(mén)踏板與制動(dòng)踏板開(kāi)度,驅(qū)動(dòng)電機(jī)輸出電磁轉(zhuǎn)矩經(jīng)由傳動(dòng)系驅(qū)動(dòng)車(chē)輪行進(jìn),能量流與實(shí)車(chē)的傳遞路線(xiàn)完全相同。因此,前向仿真結(jié)構(gòu)更適用于動(dòng)態(tài)工況實(shí)驗(yàn)平臺(tái)的建立,能夠真實(shí)反映電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)在工況運(yùn)行過(guò)程中的各種動(dòng)態(tài)變化。
本文采用前向仿真結(jié)構(gòu),駕駛員通過(guò)判斷控制驅(qū)動(dòng)力經(jīng)由真實(shí)的電驅(qū)動(dòng)系統(tǒng)經(jīng)傳動(dòng)系(ig為變速器傳動(dòng)比,i0為主減速器傳動(dòng)比)傳輸至車(chē)輪模型,克服風(fēng)阻、路阻、坡阻等行駛阻力,根據(jù)汽車(chē)行駛方程式求得其運(yùn)行情況;通過(guò)對(duì)變化的驅(qū)動(dòng)力輸入與臺(tái)架轉(zhuǎn)速觀(guān)測(cè)對(duì)汽車(chē)動(dòng)力模型進(jìn)行實(shí)時(shí)更新,保持模型動(dòng)態(tài)的變化與實(shí)車(chē)相一致。
3.2 預(yù)估控制原理
在車(chē)輛的基本參數(shù)已知的前提下,根據(jù)式(5)及當(dāng)前時(shí)刻車(chē)速可求得汽車(chē)此時(shí)的加速能力,即加速度:

對(duì)于足夠小的測(cè)試系統(tǒng)的指令周期ΔT,可近似認(rèn)為汽車(chē)在指令周期內(nèi)進(jìn)行勻加速或勻減速運(yùn)動(dòng):

下一時(shí)刻的車(chē)速可由當(dāng)前時(shí)刻由汽車(chē)模型計(jì)算出的加速度與當(dāng)前時(shí)刻的車(chē)速進(jìn)行預(yù)估:

將u(k + 1)對(duì)應(yīng)的轉(zhuǎn)速ω(k + 1)作為指令輸入,在指令周期內(nèi)根據(jù)轉(zhuǎn)速反饋對(duì)負(fù)載電機(jī)輸出轉(zhuǎn)矩進(jìn)行PID 調(diào)節(jié),以補(bǔ)償慣量差Js及系統(tǒng)中的干擾,使得下一時(shí)刻的真實(shí)轉(zhuǎn)速ω(k + 1)= ω(k + 1),在此指令周期內(nèi)的真實(shí)加速度也與汽車(chē)模型相同,其結(jié)果的精確度取決于控制的指令周期與測(cè)功機(jī)的動(dòng)態(tài)響應(yīng)時(shí)間。其控制原理如圖3 所示。
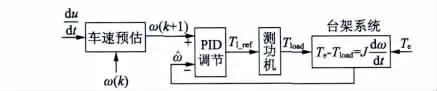
圖3 車(chē)速預(yù)估控制原理
4 試驗(yàn)與分析
為對(duì)控制策略進(jìn)行驗(yàn)證,本文以中山大學(xué)自主開(kāi)發(fā)電動(dòng)汽車(chē)ECUV 為例,在臺(tái)架系統(tǒng)上對(duì)其真實(shí)的電驅(qū)動(dòng)系統(tǒng)進(jìn)行測(cè)試,基本參數(shù)如表1 所示。車(chē)輛模型、駕駛員模型與控制算法運(yùn)行于PXIe8133 實(shí)時(shí)控制器中;踏板信號(hào)通過(guò)PXI8513 高速CAN 總線(xiàn)發(fā)送至驅(qū)動(dòng)電機(jī)控制器;75 kW 交流測(cè)功機(jī)由ABB ACS800 變頻器控制,其控制策略為直接轉(zhuǎn)矩控制,保證了轉(zhuǎn)矩的快速響應(yīng),變頻器使用RS-485 總線(xiàn)與實(shí)時(shí)控制器進(jìn)行通訊;所有控制指令、數(shù)據(jù)采集通過(guò)實(shí)時(shí)控制器進(jìn)行定時(shí)與同步。

表1 車(chē)輛基本參數(shù)
由于ECUV 為城市用電動(dòng)轎車(chē),選取ECE 市區(qū)工況對(duì)其進(jìn)行測(cè)試,指令周期取20 ms,指令周期的選取受總線(xiàn)通訊速率與測(cè)功機(jī)響應(yīng)時(shí)間的限制。
駕駛員模型根據(jù)行駛狀況與工況的偏差發(fā)出驅(qū)動(dòng)與制動(dòng)指令,控制驅(qū)動(dòng)電機(jī)輸出電磁轉(zhuǎn)矩由轉(zhuǎn)矩觀(guān)測(cè)器實(shí)時(shí)檢測(cè),制動(dòng)力指令則通過(guò)整車(chē)動(dòng)力學(xué)模型將減速特性作用于臺(tái)架測(cè)試系統(tǒng)。試驗(yàn)結(jié)果如圖4 所示。駕駛員模型的引入與轉(zhuǎn)矩觀(guān)測(cè)器的應(yīng)用使得汽車(chē)仿真模型得到了實(shí)時(shí)的更新,從而大大提高了測(cè)試系統(tǒng)的動(dòng)態(tài)性。
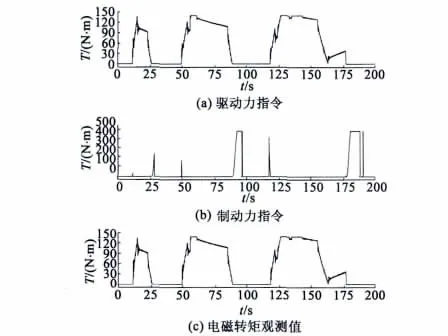
圖4 踏板指令及轉(zhuǎn)矩觀(guān)測(cè)
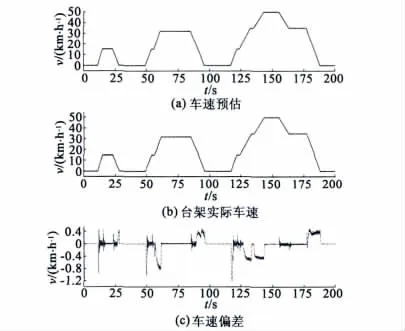
圖5 行駛工況測(cè)試
實(shí)時(shí)觀(guān)測(cè)到的驅(qū)動(dòng)電機(jī)電磁轉(zhuǎn)矩、制動(dòng)力指令及車(chē)輛基本參數(shù)計(jì)算汽車(chē)此刻的加速特性,經(jīng)速度預(yù)估后控制交流測(cè)功機(jī)對(duì)汽車(chē)慣量進(jìn)行模擬,使得車(chē)速變化與汽車(chē)仿真模型一致。對(duì)ECE 市區(qū)工況一個(gè)循環(huán)的車(chē)速模擬效果如圖5 所示。車(chē)速平均偏差僅為0.15 km/h,其中較大偏差出現(xiàn)于系統(tǒng)突加驅(qū)動(dòng)轉(zhuǎn)矩或制動(dòng)轉(zhuǎn)矩時(shí)。
由驅(qū)動(dòng)電機(jī)輸出轉(zhuǎn)矩及對(duì)應(yīng)轉(zhuǎn)速值,即可得到電驅(qū)動(dòng)系統(tǒng)實(shí)時(shí)輸出功率,可用于考察電動(dòng)汽車(chē)的能量消耗。實(shí)時(shí)輸出功率如圖6 所示。
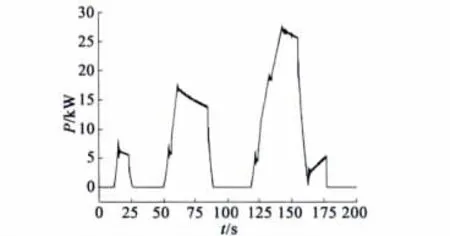
圖6 實(shí)時(shí)輸出功率
5 結(jié) 語(yǔ)
本文利用交流電力測(cè)功機(jī)的高動(dòng)態(tài)性,采用機(jī)械慣量電模擬方法對(duì)電動(dòng)汽車(chē)驅(qū)動(dòng)系統(tǒng)進(jìn)行測(cè)試,取得了良好的研究成果,具有較高的工程實(shí)用價(jià)值;采用電動(dòng)汽車(chē)前向仿真結(jié)構(gòu),與真實(shí)汽車(chē)能量流與控制流相同;通過(guò)速度預(yù)估控制策略的加入,在保證了系統(tǒng)動(dòng)態(tài)性的同時(shí),很好地抑制了外界干擾對(duì)模擬系統(tǒng)的影響。
從試驗(yàn)結(jié)果看,實(shí)際車(chē)速響應(yīng)曲線(xiàn)十分逼真地模擬出了汽車(chē)仿真模型的動(dòng)態(tài)變化,這表明了控制策略的正確性;此試驗(yàn)平臺(tái)可用于電動(dòng)汽車(chē)?yán)m(xù)駛里程試驗(yàn)、能量消耗率計(jì)算等,是設(shè)計(jì)開(kāi)發(fā)階段電驅(qū)動(dòng)性能的一種有效評(píng)價(jià)手段。
[1] 曹秉剛,張傳偉,白志峰,等.電動(dòng)汽車(chē)技術(shù)進(jìn)展和發(fā)展趨勢(shì)[J].西安交通大學(xué)學(xué)報(bào),2004(1):1-5.
[2] 陳清泉,路甬祥,詹宜巨.21 世紀(jì)的綠色交通工具[M].廣州:暨南大學(xué)出版社,2000.
[3] Ehsani M,Gao Y M,Gay S E,et al.Modern electric,hybrid electric,and fuel cell vehicles fundamentals,theory and design[M].1st ed.Boca Raton:CRC Press,2004.
[4] 劉忠途,伍慶龍,宗志堅(jiān).基于臺(tái)架模擬的純電動(dòng)汽車(chē)能耗經(jīng)濟(jì)性研究[J].中山大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,50(1):44-48.
[5] 李茂森.動(dòng)力試驗(yàn)與測(cè)功機(jī)技術(shù)[J].電機(jī)與控制應(yīng)用,2006(9):43-45.
[6] 張為公,周寧寧.汽車(chē)臺(tái)架試驗(yàn)系統(tǒng)機(jī)械慣量電模擬方法[J].汽車(chē)工程,1998(5):312-316.
[7] 莫志勇,張為公,吉同舟.汽車(chē)機(jī)械慣量電模擬技術(shù)[J].中國(guó)慣性技術(shù)學(xué)報(bào),2009(1):123-126.
[8] 黃妙華,陳飚,陳勝金.電動(dòng)汽車(chē)仿真結(jié)構(gòu)比較[J].武漢理工大學(xué)學(xué)報(bào),2005(3):66-69.
猜你喜歡
科普童話(huà)·神秘大偵探(2023年1期)2023-05-30 12:48:10
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
測(cè)控技術(shù)(2018年5期)2018-12-09 09:04:26
電子測(cè)試(2018年18期)2018-11-14 02:30:34
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
