車載三維激光測量儀單臂掃描系統的設計
2013-11-22 07:51:28譚永明
微特電機 2013年9期
譚永明
(青島市光電工程技術研究院,山東青島266101)
0 引 言
精密機械加工和精密測量密不可分,加工及測量精度及可操作性代表著一個國家的工業發展水平。幾十年前,傳統激光測距技術出現并運用于軍事方面,近幾年來,隨著非接觸式三維激光測量自動控制技術的迅速發展,并由于其具有非接觸式測量目標、掃描速度快、點位精度分布均勻、直接實現三維建模軟件對接等特點,其在建筑測繪、電網設施測量、地形測量、文物保護、工業設計、災害監測,以及交通設施質量檢測等民用行業得到廣泛應用,三維激光測量技術上日趨成熟,并逐漸成為測繪技術和方法革新的方向標[1]。
隨著信息技術的飛速發展,用戶對多種數據采集以及數據處理業務需求與日俱增,給地理信息產業市場帶來了巨大的機遇和挑戰,城市數字化是中國經濟社會發展的必然趨勢,地理信息產業也被寫入十一五規劃綱要,城市空間信息技術產業市場存在著巨大的容量。國家測繪局提供的數據顯示,現在地理信息數據服務應用增長迅速,2009 年服務應用測量的總產值已經超過了工程應用測量,占整個行業的51.6%,達到309.6 億元,比2008 年增長30%。而隨著數字化城市信息建設、城鎮化建設、國內高速公路、高速鐵路的建設的推進,對GIS 數據進行應用的需求越來越多,我國GIS 數據應用正在進入一個需求旺盛期[2]。
由于車載激光系統組成的重要部件IMU 和GPS 等原先都是軍用設備,加上激光掃描儀光學系統和掃描結構設計復雜、加工、安裝和測量調試要求高,又由于國內研發因為資金不足以及牽涉到與流行3D 軟件接口研制等難題,國內至今對三維激光掃描系統的開發仍然處于研究初期,尚未形成規模,因此,國內市場上并沒有真正意義上自主研制的成套產品。與之形成對比的是,國外產品中Focus 地面激光掃描集成系統和RIEGL 公司的車載掃描集成系統仍然是中國市場的主角。隨著對城市空間信息及地理信息的巨大國內市場需求,國內如首都師范大學、中國測繪科學研究院以及中國科學院光電研究院等很多高校和研究機構開始了對激光測量系統的探索研究,并在三維激光測量儀開發、預處理軟件和后期處理的點云自動識別著色方面取得了初步的成果。
三維激光掃描儀的核心部件是整個三維激光掃描儀中最為復雜的機械設計模塊,它關系著三維激光掃描儀的測量精度和功能,掃描系統一直是激光掃描儀設計改進中的重中之重。設計初的掃描鏡兩端軸承支撐傳動,到現在的單臂掃描系統,掃描實現了由原先的315°到現在的360°無盲區掃描,真正實現了全三維無遮擋數據采集。
1 激光測量儀的工作原理
三維激光測量技術是通過激光器發射激光信號與激光接觸目標后反射信號的相位(時間)差獲取激光測量儀到目標的直線距離,再根據發射激光信號時的方向和GPS 獲取到的激光測量儀所在的空間位置,通過軟件的數據演算,得到測量目標的空間位置[3],接連不斷的掃描形成點云,最后通過后處理軟件將相機實時拍攝點為其著色、定性,也可通過通用的三維設計軟件將點云生成面或三維結構模型,為測量實體提供數字模型[4]。
激光測量儀的工作原理如圖1 所示,激光由激光器發出,經由擴束鏡調整光源,通過傳收過渡鏡中心光孔形成發射光斑。發射光斑進入掃描系統后由360°旋轉成45°角的鍍膜旋轉鏡發出,形成激光發射光源,在接觸掃描物體表面反射后,重新返回到旋轉鏡表面,再次反射到傳收過渡鏡上,最后經過濾光瀾到達激光的接收端。從上可以看出,掃描部分的設計部件盡量簡單,安裝后旋轉穩定性高,徑向跳動小,是實現三維激光掃描儀測量精度的關鍵所在。

圖1 激光測量儀的工作原理
2 單臂掃描系統的設計
單臂掃描系統主要是用在車載三維測量儀上,因為牽扯到360°無遮擋掃描,故要求只有旋轉反射鏡探出測量儀殼體,并且其性能參數應符合表1 要求。
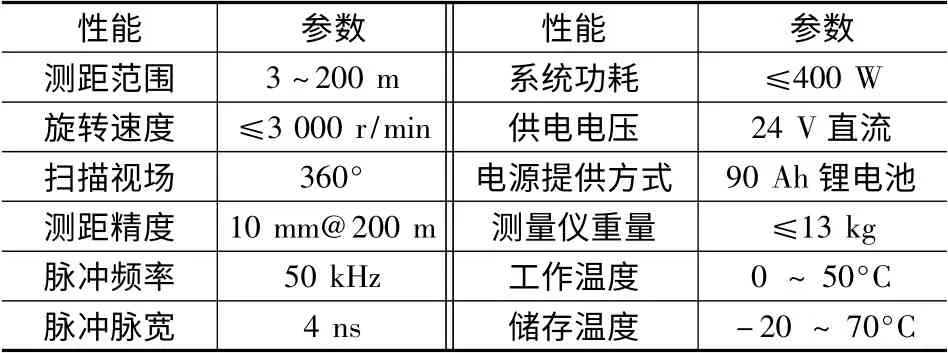
表1 車載三維激光測量儀性能參數
2.1 單臂掃描系統的組成及部件的設計選取
單臂掃描系統如圖2 所示,由轉臺軸承、無框架無刷直流電動機、掃描鏡機體及掃描鍍膜鏡體四部分組成。

圖2 單臂掃描系統的組成
2.1.1 轉臺軸承的設計選取
轉臺軸承是由一個推力/向心座圈、一個推力/向心軸圈、一個推力墊圈、兩個保持架及兩組滾球組成,該軸承對與之相配的設備零件的要求高,安裝時需使用力矩扳手安裝螺釘。其具有低摩擦、高旋轉精度、轉速高等特點,可以承受軸向、徑向及復雜載荷,采用單臂支撐方案,與傳統意義上的兩側使用軸承相比,設計安裝更為簡便,體積更小。其軸向和徑向的跳動精度可到2 μm,轉動精度也有保證。
跳動誤差導致的測量精度計算:

式中:S 為200 m 處誤差;L 為極限距離;ω 為轉臺軸承跳動極限誤差,選用轉臺的實際極限誤差為2 ×10-6;t0為轉臺軸承定靜分界點,選用轉臺系數為0. 042。
經計算得S = 9.523 8 × 10-3m,小于200 m 距離要求的設計誤差10 mm,滿足設計測量精度。
轉臺軸承因為間隙小,一般半年到一年就需補充特種潤滑油脂,由于三維激光測量儀為高精度測量設備,部件需高度清潔,不宜經常拆卸,因此,測量儀殼體上需考慮加潤滑油孔,并保證加油密封和路徑的絕對安全性。
2.1.2 無框架無刷直流電動機的設計選取
無框架無刷直流電動機可以實現空心軸方案,從而實現激光從芯穿過,完成激光發出、回收的單臂路徑。與傳統帶軸的電機性能相比,省去連軸節,保持掃描鏡機體與電機的同步性更強、同心度更高、受力方式更好;唯一的缺陷在于對安裝要求高,去除了本應該成套組裝的中心軸,由掃描鏡機體取而代之,不僅要求掃描鏡機體強度高、硬度好、研磨到位,而且要求精密安裝,保證配合精度。
當電機轉速分別為3 000 r/min、2 400 r/min 和1 800 r/min 時,從電機零位開始計時,到電機轉過500 線為止,經過的時間為t。

根據掃描測量公差,在極限距離200 m 誤差為10 mm 和滯后數據測算電機轉速穩定性為0.26%。
電機的扭矩主要是用來克服自身摩擦阻力和轉臺軸承的摩擦阻力,其扭矩的要求如下:

式中:T 為電機的常規扭矩;Tf1為電機自身的摩擦扭矩,選取電機自身系數0.0212 N·m;Tf2為轉臺軸承的摩擦力矩,選取轉臺摩擦力矩1.6 N·m。
電機功率計算:

式中:J 為轉動慣量;J1為電機轉子部分慣量;J2為軸承轉子部分慣量;J3為掃描鏡機體慣量;J4為掃描鏡膜鏡體慣量。計算得到J = 0.003 66 kg·m2。

式中:β 為角加速度;Δω 為轉速;Δt 為提速時間;β= 314 rad /s2。

式中:M 為慣性力矩。

式中:N 為轉動功率;n 為電機轉速,取值3 000 r/min。
考慮到電機轉速高、穩定性好、尺寸要求嚴格及電機本身的供電電壓(24 V)、力矩及功率要求特殊,目前采用的還是特制無框架無刷電動機。
2.1.3 掃描鍍膜鏡體的設計
因為掃描鏡旋轉速度在3 000 r/min,所以掃描鏡的剛性必須強,并且對鍍膜表面的光潔度要求更為苛刻,故掃描鍍膜鏡體采用的是硬鋁金屬鍍膜,其功能是將作為激光發射回收的過渡平臺,并實現360°旋轉發射,如圖3 所示。而對于安裝后的角度誤差要求則不高,加工時的45°面和安裝時與掃描鏡機體都不需要很精確,因為設備組裝完成后都會通過全站儀等相關測量設備對每臺設備數據矯正,校正后的數據會通過軟件對各自設備進行數據糾正,實現后期的精確測量。
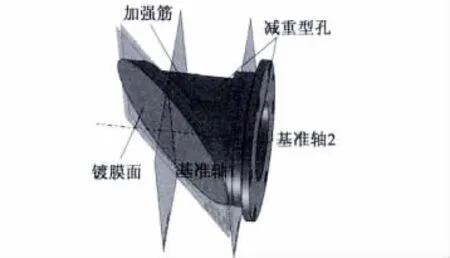
圖3 掃描鍍膜鏡體設計
因為轉速高,且轉動穩定性要求高,掃描鍍膜鏡體的設計必須考慮動平衡,單臂掃描軸向動力無法平衡,徑向可以通過設計減重型孔來分布重心,讓重心落入軸線上,實現徑向動平衡。
2.1.4 掃描鏡機體的設計
掃描鏡機體是單臂掃描系統中最為關鍵的加工部件,材料剛度、安裝配合公差、高速旋轉動平衡都將決定著設備的測量精度。掃描鏡機體采用剛性好、硬度高的高碳鉻鋼GCr15,保證與轉臺的合理安裝配合面使用過渡配合下偏差-0.011 mm,與之相配的轉臺內徑偏差為下偏差-0.008 mm,再通過內徑安裝上的緊固螺栓確保掃描鏡機體和軸承的安裝穩定。激光測量基準點是激光測量時進行的初定點,為數據的掃描提供坐標依據,起到一個基本標靶的作用,所以設計時雕刻深度要求不高,交叉中心需要和回收光路的中心相對應[5]。動平衡調整塊使用的是大比重合金硬質鉛材料,其目的是用來調整重心,實現掃描鏡機體旋轉動平衡。

圖4 掃描鏡機體的設計
掃描鏡掃描部分單向對稱,旋轉動平衡僅考慮一個方向,如圖5 所示,計算如下:

式中:| U| 為重徑積累量;U1為濾光片重徑積;U2為濾光片壓蓋重徑積;U3為掃描鍍膜鏡體重徑積;U4為掃描鏡機體重徑積。代入數值計算得| U | = 247.5 g·mm。

式中:m 為調整塊重量;l 為力臂,取31.5 mm。計算得m = 7.857 7 g。
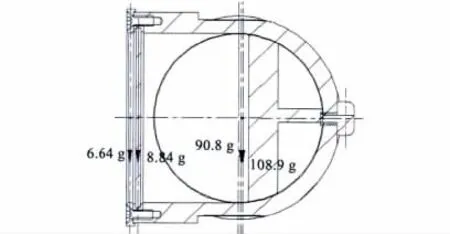
圖5 掃描鏡機體旋轉動平衡
作為精密測量設備,單臂掃描系統各部件的精密組裝、測試、設備維護、散熱及防塵、防潮、防水、防靜電等防護措施也是其設計必須考慮的重要部分。對高速旋轉體與靜態部分的密閉,除了使用密閉擋臺,還需要在配合處增加防塵毛刷,加固防塵和防潮效果;防水則通過增加切入平面,設計導水槽來完成;為了防止靜電干擾,三維激光測量儀電源板及機芯片都是采用局部增加屏蔽罩屏蔽磁波,整體外殼采用全封閉鋁制金屬外殼,避免激光損害非發射區人員健康。
3 結 語
三維激光測量儀是目前最先進的測量儀器,具有高自動化、高速度、高效率、高測量精度、應用范圍廣等特點[6],成為近幾年來國家重點扶持的項目。有人將中國過去的十年比作是信息和交通提速的十年,未來的十年則是光電的十年,激光測量儀將成為光纜空中監測維護、道路裂痕檢測、建筑測量數字建模、隧道隱蔽工程圍巖安全監測、高鐵輪軌磨損監測等方面不可缺少的監測設備。
隨著三維激光測量技術的逐漸成熟和發展,原先成本價過百萬的昂貴儀器開始規模化生產并大幅度降低成本,而國內相關產業的快速發展也為三維激光測量儀提供了巨大的市場前景。專家認為,三維激光測量儀將在不久的將來進入國內的建筑行業,替代現在通用的全站儀等普遍使用的測量設備。而作為三維激光掃描儀的核心組成部分,單臂掃描系統的研發為激光掃描儀的開發奠定了基礎。希望在不久的將來,市場上可以看到中國自主研發生產的三維激光掃描儀。
[1] 劉旭春,丁延輝.三維激光掃描技術在古建筑保護中的應用[J].測繪工程,2006,15(1):48-49.
[2] 陳東華.基于車載激光掃描系統的三維數字建模項目[J].現代商業,2010,60(30):86-90.
[3] 李清泉,楊必勝,史文中,等.三維空間數據的實時獲取、建模與可視化[M].武漢:武漢大學出版社,2008.
[4] Amenta N,Kil Y J.Defining point-set surfaces[J].ACM Trans.Graph.,2004,23(3):264-270.
[5] 李仁舉,鐘約先,由志福,等.三維測量系統中攝像機定標技術[J].清華大學學報,2002,42(4):481-483.
[6] Frohlich C,Mettenleiter M.Terrestrial laser scanning——new perspectives in 3D surveying[J].International Archives of Photogrammetry,Remote Sensing and Spatial Information Sciences,2004,36(Part 8):W2.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
