基于R5F212L4 的無刷直流電動機控制系統設計
2013-11-22 07:51:30鐘名宏杜澤華
微特電機 2013年9期
吳 軍,鐘名宏,杜澤華
(江西理工大學,江西贛州341000)
0 引 言
無刷直流電動機具有結構簡單、噪聲低、調速和起動特性好、轉矩大等優點,在工業控制、醫療器械及家電等方向應用越來越廣泛。無刷直流電動機系統包括電機本體、位置傳感器、電子開關電路[1]。應用中有無位置傳感器和有位置傳感器兩種系統之分,兩者有各自的優缺點,實際應用中應結合場合選取合適方案。FCM8202 是一款硬件實現無刷直流電動機SVPWM 驅動的芯片,性能穩定、通用性強、噪聲小、效率高、實現無級調速等優點。針對該FCM8202 價格高的缺點,提出一種基于瑞薩R5F212L4 的無刷直流電動機SVPWM 驅動系統。本系統具備其優點的同時,也大大降低了成本,還具有實現簡便、計算量小,方便添加其他功能模塊多種優點。
系統使用方波型無刷直流電動機,文中沒有特別聲明時,出現的角度為電角度,周期為電周期。
1 系統控制策略及硬件實現
系統使用有霍爾傳感器電機,設計方案為三閉環直流調速系統,即速度閉環和正弦波相位閉環。閉環一、根據霍爾周期計算瞬時轉動速度,與速度參考值比較得到速度誤差信號,經過PI 調節控制器,輸出控制增大或減小占空比;閉環二、轉子每60°更新霍爾信號時,軟件實施強制矯正,輸出正弦波電壓相位,使電壓相位與轉子位置相對應;閉環三,通過對三相電路的某相(本文取A 相)下管電流檢測,獲得其上升沿過零點,結合計時器計算此時角度,如果滯后反電動勢相位,則使輸入電壓超前一個單位,使電流相位與反電動勢的相位差不斷減小,直至為零,此時電機運行于穩態。通過以上方法實現電機穩定運行,調速平滑。方案設計的硬件控制結構如圖1所示,圖中的α 是離散的角度時刻。系統主控芯片采用R5F212L4,內置閃存,最高工作頻率20 MHz,定時器RD 多通道PWM 輸出簡化了電機控制過程。同時具有豐富的I/O 端口,9 通道AD,多個外部中斷引腳。具有較大的價格及性能優勢。
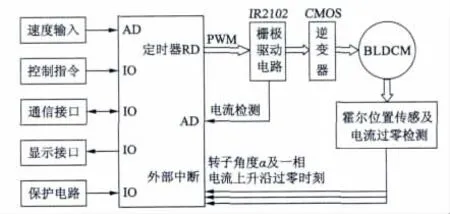
圖1 基于R5F212L 的系統結構
系統采用集成CMOS 管實現變頻器,應用IR2012 的6 個輸出端口直接驅動6 個CMOS 柵極。系統驅動電流與反電動勢相位差大小直接影響電機轉矩輸出,當此相位差為零時,此時電流相對轉子磁場相位相差90°電角度,使得電機轉矩最大。正弦波電流過零檢測是為了校正對不同參數電機進行電壓相位自適應超前,鎖定電流與反電動勢相位差為零。系統驅動電路及電流過零檢測電路如圖2 所示。
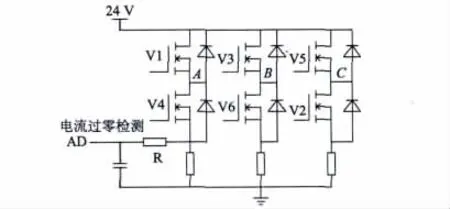
圖2 系統驅動電路及A 相電流過零檢測
2 霍爾元件安裝及轉子位置估計原理
轉子位置是電機運行的重要參數之一,若轉子位置檢測不準確,轉子估算偏差較大,都會直接影響控制,導致控制不正常或者燒毀電機。
在電機內部相距120°安裝3 個霍爾開關傳感器,當轉子轉動時,霍爾元件就會輸出一個上升沿和下降沿與轉子磁場強度B 的過零點相對應的方波信號[2]。霍爾信號的輸出應與某相繞組的空載反電動勢同相位[3]。電機轉速及轉子角度取決于該信號,若安裝傳感器時偏離理想位置就會給系統帶來很大的誤差,會給系統帶來不穩定性因素。
設定子三繞組對應霍爾信號分別為Hu、Hv及Hw,其值“1”表示霍爾信號為高電平,“0”為低電平。本文中電機產生的霍爾信號與轉子位置在程序中對應關系如表1 所示。
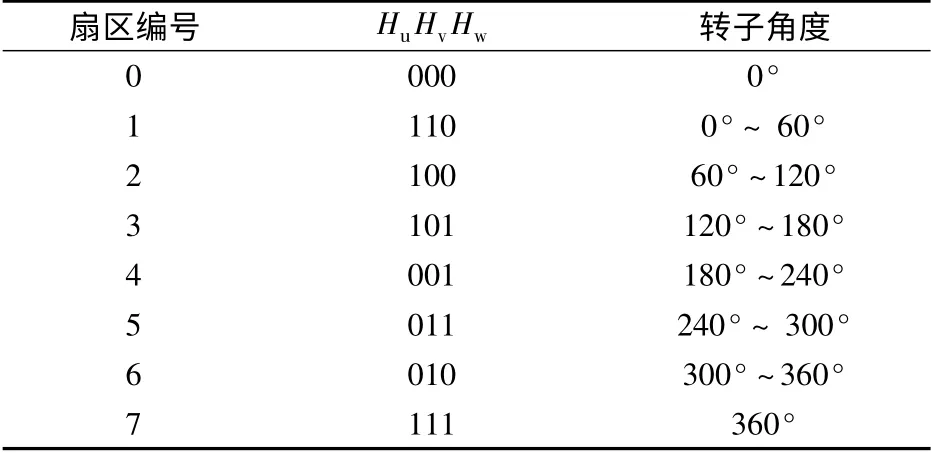
表1 霍爾信號與轉子角度對應關系
電機運行的電周期采用如圖3 所示方法計算,其中T 為霍爾周期。
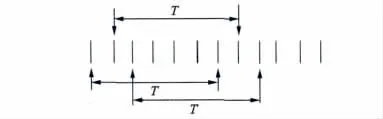
圖3 減小霍爾安裝誤差的轉動周期計算
圖中最上豎線表示霍爾傳感器上升沿和下降沿信號,間隔為60°電角度。每過60°電角度強制矯正運行角度。如下:
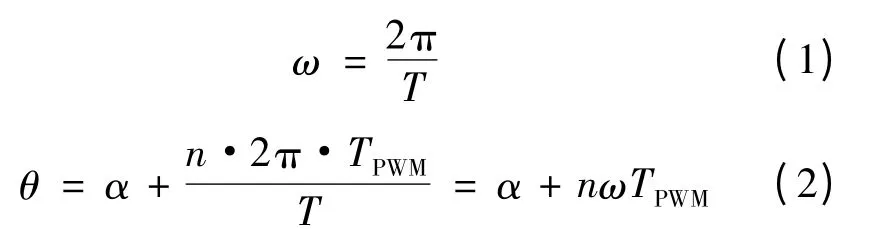
式中:ω 為轉子角速度,T 為轉子周期,θ 為正弦相位角度,α 為轉子對應扇區起點,TPWM為程序中PWM信號周期,n 為第幾個PWM 周期。其中ω、T 及α每60°角度更新,θ 及n 每PWM 周期更新。
3 控制系統的軟件設計
控制軟件主要有系統初始化、轉子速度和位置計算模塊、相位校正模塊、SVPWM 波形輸出模塊、系統故障顯示及保護模塊組成。
3.1 電流與反電動勢相位關系及相位校正
電機A 相等效電路模型如圖4 所示,電壓與電流關系如下:

圖4 A 相等效電路模型

可以看出電壓與電流有相位差存在。由于電機參數不同,導致電壓與電流相位差不是固定值。電機控制中期望使電流與反電動勢相位差為零,并且電流相位恒定在超前轉子角度90°,使其在高效率下工作。相位校正前后電壓、電流及反電動勢對應轉子角度波形如圖5 所示。
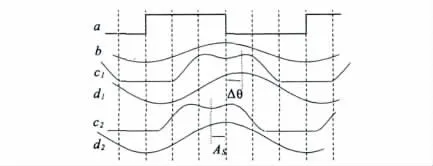
圖5 電壓電流及反電動勢對應轉子角度波形
圖中,a 為霍爾信號,b 為相反電動勢,c1和c2為不同相位相電壓,d1和d2為不同相位電壓對應的相電流,Δθ 為相電流與相反電動勢相位差,As為相電壓與相電流相位差。
通過調整相電壓相位使Δθ 趨于零,使電流與相反電動勢同相,鎖定此時的相位偏移即達到相位校正目的。程序流程圖如圖6 所示。
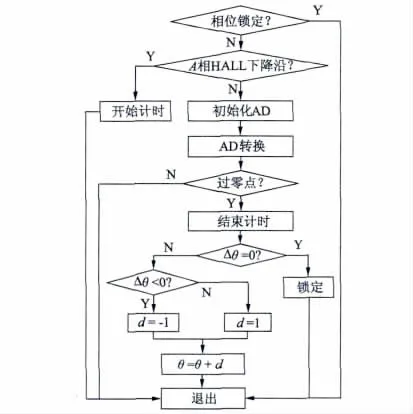
圖6 相位校正程序流程圖
其中,一個霍爾周期計時一次,即θ 校正一次,θ為轉子位置角,d 為相位校正步距(圖6 中校正步距為1°)。
3.2 SVPWM 輸出設計
為了減小電子開關頻率,提高其使用壽命,FCM8202 中采用了上管不導通時下管常開策略。同時為提高電能利用率,加入三次諧波,產生相電壓波形如圖5 中相電壓。SVPWM 輸出是定時獲取轉子角度,通過查表輸出對應角度的三相電壓值,程序流程如圖7 所示。
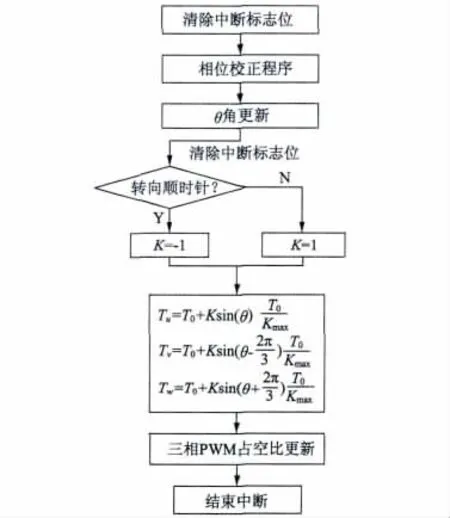
圖7 中斷程序實現正弦波調制
圖中,θ 為轉子位置角,T0為,Tu、Tv、Tw為三相上管的導通占空比,TPWM為PWM 周期,Kmax為正弦表的幅值。
4 結 語
為了驗證本文驅動系統的自適應性,實驗中使用霍爾傳感器無刷直流電動機,定子繞組為三相星形連接,磁極對數為2,相感抗為0.05 mH,相阻抗為350 mΩ,最大轉速3 000 r/min,24 V 給電機供電。在3 000 r/min 時,最大容許電流為3.5 A,轉矩常數為10.8 N·m/A。當占空比為98% 空載時,轉速3 000 r/min,電流為450 mA,在300 r/min 時,電流為90 mA,電機運行平穩,電流較小,振動噪聲小,實現無級調速。
本文SVPWM 驅動系統有如下優點:
(1)通過軟件設計進行相位校正后,解決了由電流與轉子相位差不固定在90°所帶來的電源低效率、電機大電流運行發熱等問題,使電機運行于最大轉矩、最小電流環境下,達到高效率運行。
(2)電機系統起動平穩,運行時無振動和失步現象,同時系統結構簡單,運行可靠,正反轉調速性能良好的優點。該方法計算量小,對MCU 的要求低,在低直流母線電壓的中小功率應用場合具有技術優勢。
(3)系統實現簡便,計算量小,可以方便地添加其他功能模塊,增強系統的可擴展性。
[1] 張琛.直流無刷電動機原理及應用[M].北京:機械工業出版社,2004.
[2] Capponi F G,De Donato G,Del Ferraro L.AC brushless drive with low resolution Hall-effect sensors for an axial flux PM machine.[C]/ /39th Industry Applications Conference Annual Meeting.2004,4:2382-2389.
[3] 鄒繼斌,徐永向,于成龍,等.正弦波無刷直流電機的新型轉子位置檢測方法[J].中國電機工程學報,2002,22(12):47-49,55.
[4] 曾風平,鄭成勇,章躍進,等.基于開關型霍爾位置傳感器的永磁同步電動機正弦波驅動[J].微特電機,2010,38(8):56 -58,71.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
