歐洲“火星快車”探測器自行底盤概念設計的啟示
2013-11-28 02:22:14王宇燕
航天器環境工程 2013年2期
王宇燕
(中國北方車輛研究所 信息中心,北京100072)
0 引言
世界各航天大國均重視對行星表面的探測。利用行星表面巡視探測車(漫游機器人),可完成對行星表面的地形地貌實地勘測[1]。前蘇聯最早將月球車送上月球,而美國不僅實現了載人登月,而且還開展了一系列的火星表面巡視探測。國內相關研究開展較晚,但也掀起了行星表面巡視探測車的關鍵技術研究熱潮,承擔相關技術研發的單位眾多,已取得了一些研究成果。
作者對國外的月球車和火星車進行了跟蹤調研,重點考察了歐洲空間局(ESA)的“火星快車”探測器項目[2],其中探測器的底盤設計由俄羅斯承擔。本文對“火星快車”(以下稱火星車)自行底盤概念的設計思想和具體實施情況進行了深入分析。
1 火星車的運動性能考慮
火星車在任務、功能、結構、控制方法等主要方面與月球車有很多相似之處[2]。月球表面地形復雜,崎嶇不平,而且還覆蓋了一層厚厚的風化層,這種松軟細密的風化層很容易使月球車車輪打滑,從而失去牽引作用,甚至陷入月壤無法前行[3]。因此,月球車要完成預定的探測任務,就必須要有良好的運動性能,包括越障性能、爬坡性能、通過性能、抗傾覆性能以及地形適應性能等[4]。同樣,火星車在火星表面不同地形地貌上移動并完成預定的探測任務,須考慮與月球車一樣的共性問題。
火星車的運動性能與其底盤設計密切相關。在考慮火星車底盤方案類型時,最重要的因素是車輪在火星疏松土壤上的支撐通過性能和在火星復雜崎嶇表面(如巖石障礙)的幾何通過性能[5]。火星車底盤方案設計應考慮在滿足幾何通過性能要求的基礎上,最大限度地提高火星車的支撐通過性能[6]。為了確保火星車對火星表面的適應性和巡視探測任務的成功,除了提高其各項運動性能外,這些性能具有高可靠性同樣至關重要。
2 火星車底盤方案的初步考慮
2.1 底盤類型的選擇
火星車的底盤主要有輪式底盤和履帶式底盤兩種類型。履帶式推進裝置具有較高的牽引能力,但結構較復雜,其與輪式底盤相比效率較低,而且可靠性較差。因此,優先選擇輪式底盤方案。
2.2 推進裝置的選擇
為提高火星車底盤輪子的牽引能力,俄羅斯車輛運輸研究所經過廣泛而深入的研究,開展了理論仿真和地面試驗,提出了輪式-跨步組合形式的推進裝置。
盡管這種新的推進裝置比輪式推進裝置略重些(因為它增加了一個額外的驅動器),但能使車輪相對于底盤本體作縱向位移。通常,行星車在發射飛行中是折疊放置到緊湊的運輸艙中,當著陸到行星表面上后,它才會展開成工作姿態,而展開動作就要用到一些特殊的展開驅動機構。輪式-跨步推進裝置中的展開功能由跨步驅動執行,不再需要額外的機構,避免了質量的增加。因此,“火星快車”項目中的火星車演示樣機優先選用了這個方案,如圖1所示。

圖1 “火星快車”項目的火星車樣機Fig. 1 Model prototype of rover for Mars Express program
2.3 輪式方案的選擇
四輪式車輛的參數h /D(車輛越過臺階高度與車輪直徑之比)的理論極限值為 0.4(在附著系數φ≥1的條件下),而非標準的六輪式車輛,其參數h /D的數值可以超過1.0,并且每個輪子的載荷更均勻,可確保車輪有較大的行程。因此,火星車選擇6×6輪式方案。
3 火星車的底盤結構方案
3.1 懸掛方案
影響“火星快車”的通過性能的最重要因素之一是輪子的承載情況:輪子承載越均勻,則其通過性能就越好。
輪子的自行底盤設計受到了極大的限制,因為它要求將整個有效載荷分布到單位容積上。在這種情況下,尤其不能采用鉸接的自行底盤[7]。
可以采用的有非獨立彈性懸掛和平衡式非彈性懸掛兩種方案。
1)非獨立彈性懸掛方案
非獨立彈性懸掛方案的結構非常簡單,蘇聯和美國最早的月球車采用的都是這種方式。但是,這種懸掛方式有其自身的缺陷:當車沿著復雜的路面行走時,所懸掛的彈性元件并不能確保輪子承受常量載荷。此外,當車爬坡的時候,這種懸掛方式還降低了車行的穩定性。為了克服這些缺點,俄羅斯車輛運輸研究所對火星車進行了改進設計,研制出IARES 模型樣機(圖2),采用專門的驅動機構以改變懸掛彈性元件的受力狀態。當然,改進設計會使結構變得愈加復雜,相應也會增加質量。
圖2 IARES 模型樣機Fig. 2 Model prototype of IARES
2)平衡式非彈性懸掛方案
平衡式非彈性懸掛方案通過所懸掛的元件改變輪子的運動關系,從而平衡每個車輪的承載情況。這種懸掛方案在4×4輪式底盤中實現起來比較簡單,而在6×6輪式底盤中就較為復雜。綜合考慮各方面的因素,研究人員認為平衡式非彈性懸掛方案適用于“火星快車”。
3.2 自行底盤的組合方案
最初研究和分析時,考慮有以下幾種自行底盤的組合方案:
1)4×4×4輪式結構和平衡式非彈性懸掛的自行底盤的組合方案(A型);
2)4×4×4+4ш輪式結構和平衡式非彈性懸掛的自行底盤的組合方案(B型);
3)6×6×4+4ш輪式結構和平衡式非彈性懸掛的自行底盤的組合方案(C型)。
每個組合方案中的第 3個數字表示裝的轉向驅動的車輪數量,而符號“+4ш”表示有 4個跨步驅動器。
А型和 В型自行底盤的每一側輪子成對地裝在一根縱向平衡的拉桿上,用同步機構附加聯動,而同步機構可保證平衡構件相對于車架向相反方向旋轉同樣的角度。每個車輪都配有單獨的轉向驅動機構。
B型方案的每個輪子還另配裝了跨步驅動器,而A型方案沒有。圖3所示的是B型自行底盤的各種姿態:а、b、с分別為車體標定、車體升高后和車體降低時的姿態;d 為跨步時的姿態;е為沿崎嶇不平路面行駛的姿態;f為在運輸時的姿態;g、h、i均為工作時的姿態。
圖4 所示的是C型自行底盤的各種姿態。該自行底盤的每側輪子之間互相聯結,輪子又通過懸掛方式與車架相聯結;而懸掛方式是一個鉸接-杠桿機構,其運動可以使每側3個輪子的載荷均勻地分布,此外,3個輪子側向的模塊之間通過同步機構相聯結(類似于А 和В型底盤的結構)。4個角上的輪子均配有單獨的轉向驅動機構和跨步驅動器。圖4中各種姿態的定義如下:а、b、с均為當底盤沿崎嶇不平路面行駛時的姿態,d、e分別為車體升高后和車體降低時的姿態;f為自行底盤車體往土壤上著落的姿態;g、h均為工作時的姿態;i為在運輸狀態下的姿態。
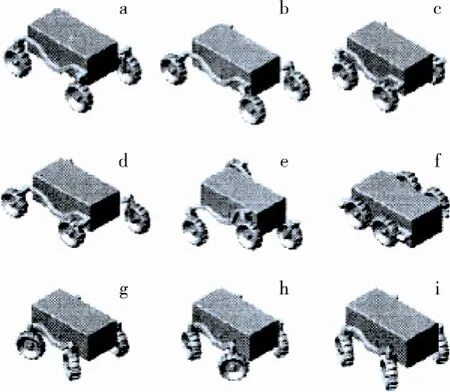
圖3 B型自行底盤和它的各種不同姿態Fig. 3 B type chassis and its various configurations
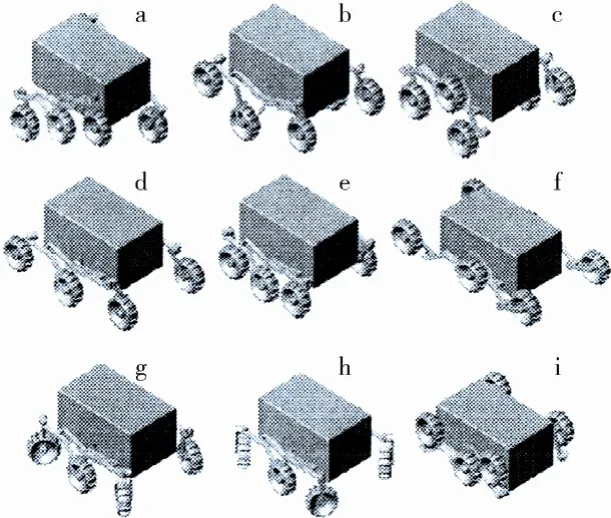
圖4 C型自行底盤和它的各種不同姿態Fig. 4 C type chassis and its various configurations
3.3 3種組合方案的比較
表1列出了A型、B型和C型自行底盤的技術特性比較。

表1 3種自行底盤方案的技術特性比較Table1 Comparison of the calculated characteristics between three self-propelling chassis plans
從表1中可以看出:С型自行底盤的質量偏大,但技術特性最佳,因此它被確定為最優方案。
3.4 C型組合方案的進一步優化
為了提高“火星快車”的通過性能,對 C型組合方案的懸掛結構作進一步改進設計。
平衡式非彈性懸掛的理想狀態是,不僅要確保火星車在平坦的路面上行駛時每個輪子上所承受的載荷均勻,而且在復雜的路面上行駛時所承受的載荷同樣要均勻。
圖5所示的是6×6輪式火星車逾越障礙物的受力情形。
越過障礙物的理想條件是:φ3(φ1Pz1+φ2Pz2)≥Pz3。當φ1=φ2=φ3時,懸掛方式已確保輪子在任意垂直方向上φ≥0.7移動時能實現Pz1≈Pz2≈Pz3,也就是說如果附著系數大于0.7,在均勻的土壤上越障,有可能實現輪子均勻承載。但是實際情況如圖 5 所示的情形,即輪子在沿崎嶇不平的路面勻速行駛的時候,有一個縱向移動的分運動,這個運動會讓輪子承受的載荷重新分布,使得Pz2的值極大地減小;當Pz2接近0的時候,越障條件是φ≥1。火星上最典型的越障情況是凸出的石頭,此時的越障條件應為φ1<0.4~0.5[7]。為了越過障礙,要求后輪與障礙物的附著系數大于2,而在大部分情況下這是不可能達到的。
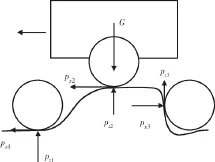
圖5 自行底盤越障時每個輪子的受力示意圖Fig. 5 Schematic diagram of the forces acting on each wheel when the self propelling chassis goes over obstacles
這樣一來,火星車的幾何通過性能在很大程度上取決于懸掛方式的特性。為了提高火星車的幾何通過性能,應設法避免輪子作縱向移動。這也是火星車成功設計的關鍵。
4 模型樣機的試驗研究
針對以上的方案分析結果,俄方研制了模型樣機(比例為1∶2),稱之為“ExoMaDeR”樣機(如圖6所示)。
在樣機研制中,所采用的方案沒有配裝跨步驅動器,而是用專門的離合器來替代,以模擬跨步驅動器的功能。
模型樣機每側輪之間相互聯結,輪子又通過懸掛方式與車架相聯結,而懸掛方式采用的是絞鏈-杠桿機構。此外,3個輪子側向模塊之間采用同步機構聯結。
ExoMaDeR模型樣機在ESTEC的試驗場進行了試驗,驗證結果表明:其全負載情況下的通過性能甚至比無負載下的通過性能尤其是穩定性還要好[8],也沒有出現輪子縱向移動。由此可見,自行底盤概念設計的思想是正確的。
5 結束語
行星車在復雜地形中的運動能力、穩定性和可靠性,將直接影響深空探測項目的成敗[9]。2013年,我國按計劃將發射月球車,開展月面巡視探測。在此基礎上,我國還將制定和實施火星探測計劃。為了確保巡視探測任務的成功,廣泛地吸納國外的成功經驗尤為重要。
通過對“火星快車”自行底盤設計思路的跟蹤調研與分析,得出了一些基本結論,這些工作可為我國開展行星車的進一步研究提供參考。針對我國深空探測項目實施的需求,應在以下幾個方面開展工作:
1)車輪土壤支撐通過能力的理論研究和試驗驗證研究;
2)以單側車輪負載均衡化為設計目標的行走構型的研發;
3) 深空探測行星車專用部件的模塊化設計研究,以利于根據不同的探測任務實現功能的快速組合;
4)具有整車折疊的跨步機構的研究,以提高車輛通過性能。
(References)
[1]Кемуржная А Л, Громов и др В В. Планетоходы[M].Мoskva: Машиностроение, 1982
[2]盧波, 范嵬娜. 國外月球車及火星車技術的發展綜述[C]//中國空間科學學會空間探測專業委員會第十八次學術會議, 2005
[3]葛平淑, 郭烈, 王孝蘭, 等. 松軟月面上月球車動力學建模及運動控制研究[J]. 計算機工程與應用, 2011,47(12): 1-4 Ge Pingshu, Guo Lie, Wang Xiaolan, et al. Dynamic modeling and motion control for lunar rover on loose soil[J]. Computer Engineering and Applications, 2011,47(12): 1-4
[4]蘇波, 江雷, 房加志. 月球車月面支撐通過性研究及車輪優化設計[J]. 機械設計與制造, 2011, 4(4): 21-23 Su Bo, Jiang Lei, Fang Jiazhi. Research on supportingtrafficability of lunar rover and wheel design optimization[J]. Machinery Design and Manufacture,2011, 4(4): 21-23
[5]Кемуржная А Л, Громов В В, Кажукало и др И Д.Передвижение по грунтам Луны и планет[M].Мoskva: Машиностроение, 1982
[6]Мaurette М, Lamboley M, Koutcherenko V, et al.Development of the demonstrator of the self-propelled chassis for the Mars rover on the basis of the INTAS-CNES project[C]//Proceeding of ESA Worshop ASTRA’02. Noordwijk, The Netherlands, 2002
[7]Беккер М Г. Введение в теорию систем местность машина[M]. Мoskva: Машиностроение, 1973: 63-69
[8]Кучеренко В И, Богачев А Н. Шасси марсохода европейского проекта "ЕXOМARS"[C]//Материалы международных семинаров, 2006
[9]陳世榮. 搖桿-轉向架式月球車月面通過性能研究[D].合肥: 中國科學技術大學博士學位論文, 2009
