悄無聲息的天外機動
2013-12-07 05:14:58陳奕卓
太空探索 2013年3期
□ 陳奕卓

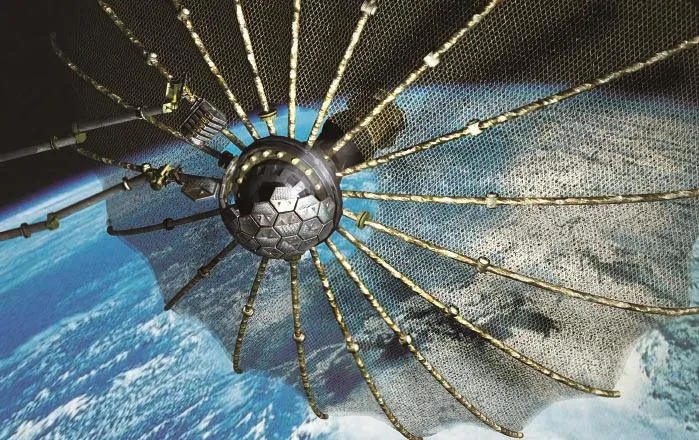
“軌道快車”驗證衛星維修技術,包括交會、捕捉、對接,以及燃料轉移和電池更換
去年年底,高度機密的X-37B再次升空,到太空秘密游蕩。它在執行什么使命?美國空軍發言人諱莫如深地表示:“驗證空間飛行性能,證明重復使用的實用性和成本效益。”這只是新型空間機動平臺的“冰山一角”,空間較量的天幕早已拉開……
循序漸進的“民掩軍”
到目前為止,只有美國開展過新型空間機動平臺有關項目的在軌飛行演示驗證。
2003年,美國海軍研究實驗室的“試驗衛星系統項目”10(XSS-10)成功進行了在軌試驗。試驗過程中,與火箭上面級分離后,XSS-10在距離上面級數百米的范圍內進行繞飛、接近等軌道機動,在同一軌道面指定的4個位置對上面級進行拍照和狀態檢測,并將獲得的數據成功下傳。
2005年,美國空軍成功進行了XSS-11任務的飛行試驗。XSS-11環繞其運載器“米諾陶”1火箭上面級飛行超過75圈,與上面級在0.5千米~1.5千米距離先后實施3次交會。
2005,美國航宇局的“自主交會技術驗證衛星”(DART)與在同一軌道面內的“多路徑超視距通信衛星”實現了交會,接近到距離5米的位置,并利用星上的制導敏感器和GPS導航信息完成幾次近距離機動。雖然DART與目標衛星在交會階段發生了碰撞,但該次驗證仍然實現預期目標。
2007年3月~7月,美國國防部高級研究計劃局、空軍和美國航宇局聯合完成了“軌道快車”項目的在軌演示驗證。作為新型空間機動平臺的“太空自動化運輸機器人”與目標星成功完成了在同一軌道面內以軌道機動為支撐的空間操作。在交會、逼近、位置保持的基礎上進行了捕獲、常溫推進劑加注、模塊更換等操作。該次演示驗證被認為是新型空間機動平臺發展史上的里程碑事件,標志著在同一軌道面內以軌道機動為支撐的空間操作技術逐步走向成熟。在進行在軌飛行試驗以前,美國國防部高級研究計劃局開展了充分的軌道快車概念方案研究論證和大量的地面試驗,從2004財年至2007財年,不惜兩次推遲在軌試驗,為最終試驗的成功奠定了堅實基礎。
“自主交會技術驗證”飛行器與“多路徑超視距通信”衛星交會示意圖
2010年~2012年,美國空軍成功完成了X-37B空間機動飛行器驗證機的兩次驗證飛行。雖然美國空軍沒有具體公布X-37B的軌道參數,但根據國外天文愛好者的觀測數據,兩次試驗中X-37B的軌道高度均有較為明顯的改變,但軌道傾角基本上沒有變化。這表明在同一軌道面內以軌道機動為支撐開展空間操作后可實現重復使用的新型空間機動平臺技術獲得驗證。美國空軍于2012年12月11日開始了第三次X-37B飛行試驗,使用的是第一次進行飛行試驗的X-37B飛行器,以進一步驗證其重復使用性能。

2012年6月16日第2架X-37B在軌神秘飛行469天后成功著陸加利福尼亞州范登堡空軍基地
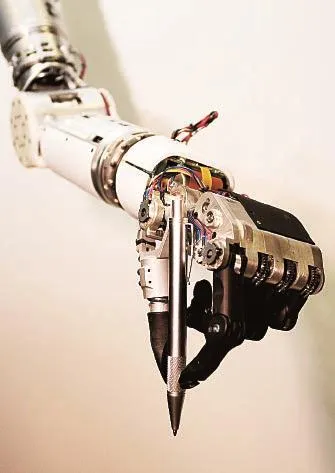
能靈活拿起鋼筆的機械手
從上面可看出,美國在新型空間機動平臺的發展方面選取了兩種不同的技術途徑,但都是循序漸進的發展思路。一種是在同一軌道面內進行機動與操作的空間平臺技術,另一種是在不同軌道面內進行機動與操作的空間平臺技術。兩種技術途徑下又可以再各劃分三個類型,一是專注于進行軌道機動;二是以軌道機動為基礎開展空間操作;三是以軌道機動為基礎開展空間操作后返回地面實現重復使用。
美國新型空間機動平臺的發展一直是以滿足空間攻防對抗的需求為牽引的,具有重要的空間攻防應用潛力。為己方航天器補充燃料、更換故障部件,能夠有效提升衛星的機動能力和生存性能。機動能力的增強使得衛星可以經常改變軌道位置,實施對目標的機動偵察,增強躲避攻擊的能力;也可實現由較少衛星構成局部的機動偵察網絡來完成以前不能完成的任務。此外,新型空間機動平臺所具備的交會、逼近、位置保持、捕獲等能力也可用于反衛星武器,以捕獲、打擊、摧毀敵方的航天器。
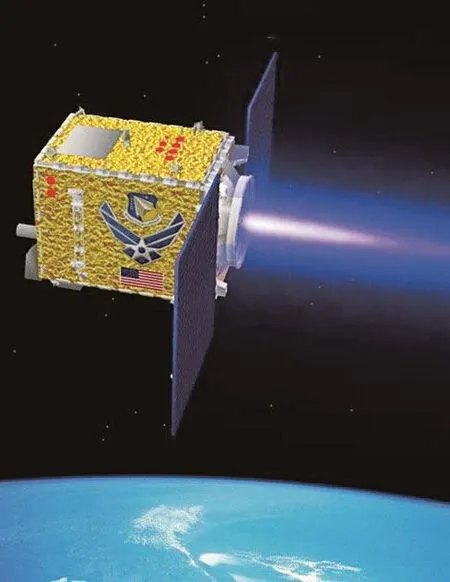
2005年4月11日發射的XSS-11用于試驗反衛星武器
藝術家描繪的“鳳凰”項目概念圖之一
不斷融入創新性要素
新型空間機動平臺與傳統的衛星相比有兩個重要的區別:一是在空間機動能力和靈活性方面較傳統衛星有顯著地提高;二是新型空間機動平臺能夠裝備機械臂以及推進劑加注等專用設備,完成各種靈活的空間操作。性能的復雜新穎性,注定需要諸多創新性要素不斷融入其發展之中,因此,新型空間機動平臺的發展往往是和具有創新性的技術、概念結合在一起的。
美國國防部高級研究計劃局在2011年正式啟動了“鳳凰”項目,其中的服務航天器平臺設計能承載1000千克的有效載荷。與之前 “軌道快車”等低軌道空間操作平臺不同的是,該平臺被要求在地球靜止軌道(GEO)進行軌道機動接近目標衛星。第一,要用機械手工具抓取處于自由飛行狀態的有效載荷軌道交付系統,安放在平臺工具箱中;第二,執行空間機動接近另一顆位于GEO軌道的目標衛星,并用機械手工具抓取目標星進行對接;第三,利用機械手工具抓取平臺工具箱中包括細胞化衛星在內的工具安裝在目標星的天線上;第四,將目標星天線切割下來并拖拽至預定位置。這是一個技術創新的集合體,計劃中還包含了細胞化衛星這種新的衛星設計和應用理念、寄宿有效載荷、空間碎片清除、空間資源的重復利用等新的要素。
藝術家描繪的“鳳凰”項目概念圖之二
美國空軍研究實驗室太空運載指揮部在2012年10月授予美國軌道科學公司一份為期五年、價值3200萬美元的合同,用于開發有能力搭載多個有效載荷,并在地球同步軌道和低地球軌道都能運行的新型空間機動平臺。這種平臺稱為“鷹”(EAGLE),EAGLE是漸進一次性運載火箭次級適配器增強同步實驗室實驗的英文縮寫。“鷹”平臺可以由“宇宙神”5以及“德爾它”4火箭發射,其結構包括一個六端口標準型ESPA環,軌道科學公司希望“鷹”平臺有能力搭載6個有效載荷,在同步軌道停留至少一年。“鷹”平臺可以攜帶足夠的推進劑,將有效載荷部署到不同的位置。軌道科學公司稱用戶最初的設計需求是容納4個有效載荷,但該公司的創新設計節省出了足夠兩個有效載荷使用的空間。美國空軍將在2017年左右進行這種新型空間機動平臺的演示驗證,將突破原有平臺只在低地球軌道上進行驗證的情況。
從廣州出發飛 行了16個小時,再坐上2小時的大巴,穿越一片片平坦開闊的葡萄園、橄欖園,路過一棟棟白色或淺黃色的石屋,終于抵達普利亞產區的中心城市:曼杜里亞。此時接近正午,陽光正好,清勁的海風撲面而來,一下子驅散了長途旅行的不適。空氣中彌漫著橄欖香、泥土香,暖暖的,非常愜意。放眼望去,都是狹窄的石頭街道、古老的石頭房子和教堂,街上行人寥寥。

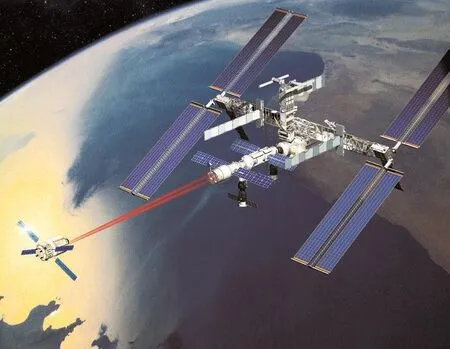
國際空間站機械臂伸手去抓逼近的日本HTV-2貨運飛船
跨部門合作演示驗證
新型空間機動平臺融合了諸多新技術,具有較強的探索性和風險性。美國在發展新型空間機動平臺的過程中采取了跨部門合作的方式,通過力量匯聚開展技術攻關和演示驗證。其中最典型的兩個重點項目是“軌道快車”項目和X-37B空間機動飛行器項目。
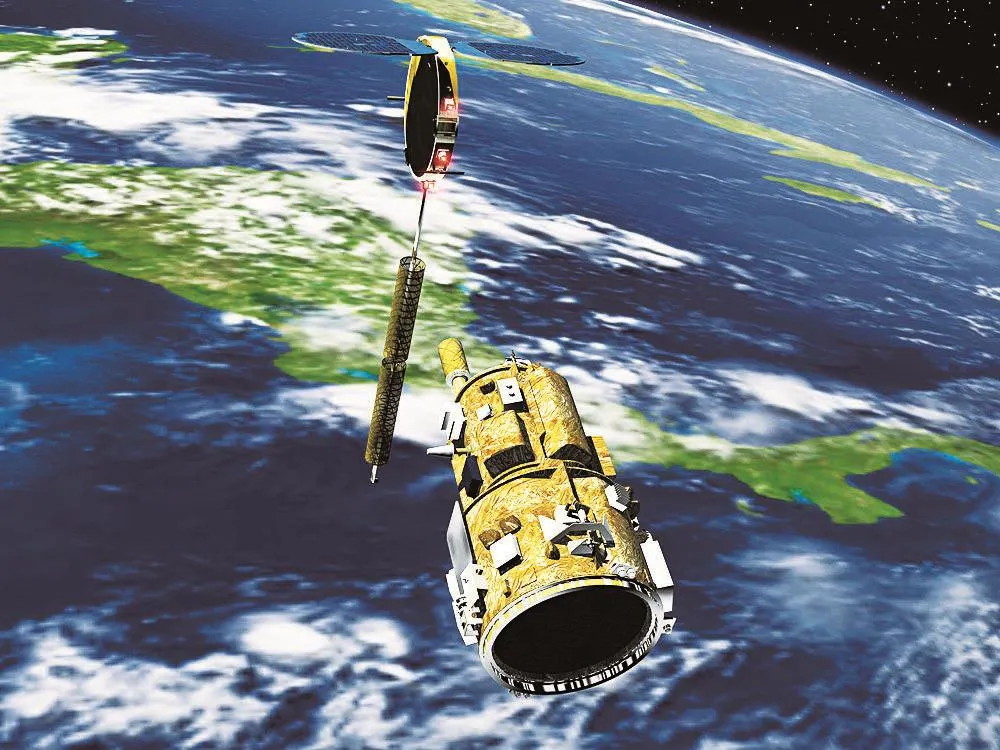
“軌道快車”項目最初是由美國國防部高級研究計劃局提出的,美國國防部高級研究計劃局也一直作為該項目的牽頭實施單位。在實施過程中美國空軍、美國航宇局逐步參與其中。美國空軍不僅為軌道快車提供運載器,而且提供了跟蹤、測控等地面運行服務支持。美國航宇局從2004財年開始即加入了“軌道快車”項目,一方面在項目中試驗部分傳感器和軟件,目的是降低軌道空間飛機在自主交會和逼近操作過程中的風險以及未來對國際空間站進行商業補給操作的風險;另一方面為項目提供傳感器和軟件技術支持,這些產品和技術原本是為降低哈勃空間望遠鏡機器人服務任務風險所研制的。美國航宇局還提供了空間站機械臂方面的技術以支持研制“軌道快車”機械臂。此外,“軌道快車”的推進系統與美國航宇局的“自主交會技術驗證衛星”DART的推進系統有很強的繼承性。
歐洲自動轉移飛行器與國際空間站交會示意圖
X-37B空間機動飛行器項目的合作研制特點更加突出,這也是由X-37B的技術難度大、風險高所決定的。自從1999年項目正式啟動以來,先后由美國空軍、美國航宇局和國防高級研究計劃局等多個單位負責管理。雖然每個單位在管理過程中的對項目要求的側重點不盡相同,但客觀上形成了一種接力棒式的合作研制模式。X-37B項目一開始由空軍研究實驗室負責管理;1999年7月~2004年9月,轉由美國航宇局負責管理,由空軍研究實驗室輔助;2004年9月~2006年9月,轉由國防部高級研究計劃局負責,進行了高空高速無動力飛行進場著陸試驗;2006年9月至今,由空軍快速能力辦公室負責管理,進行軌道飛行器的研制和試驗。實際上在X-37B管理權的不斷轉移過程中,空軍、美國航宇局和美國國防部高級研究計劃局都沒有離開X-37B項目,合作關系一直存在。
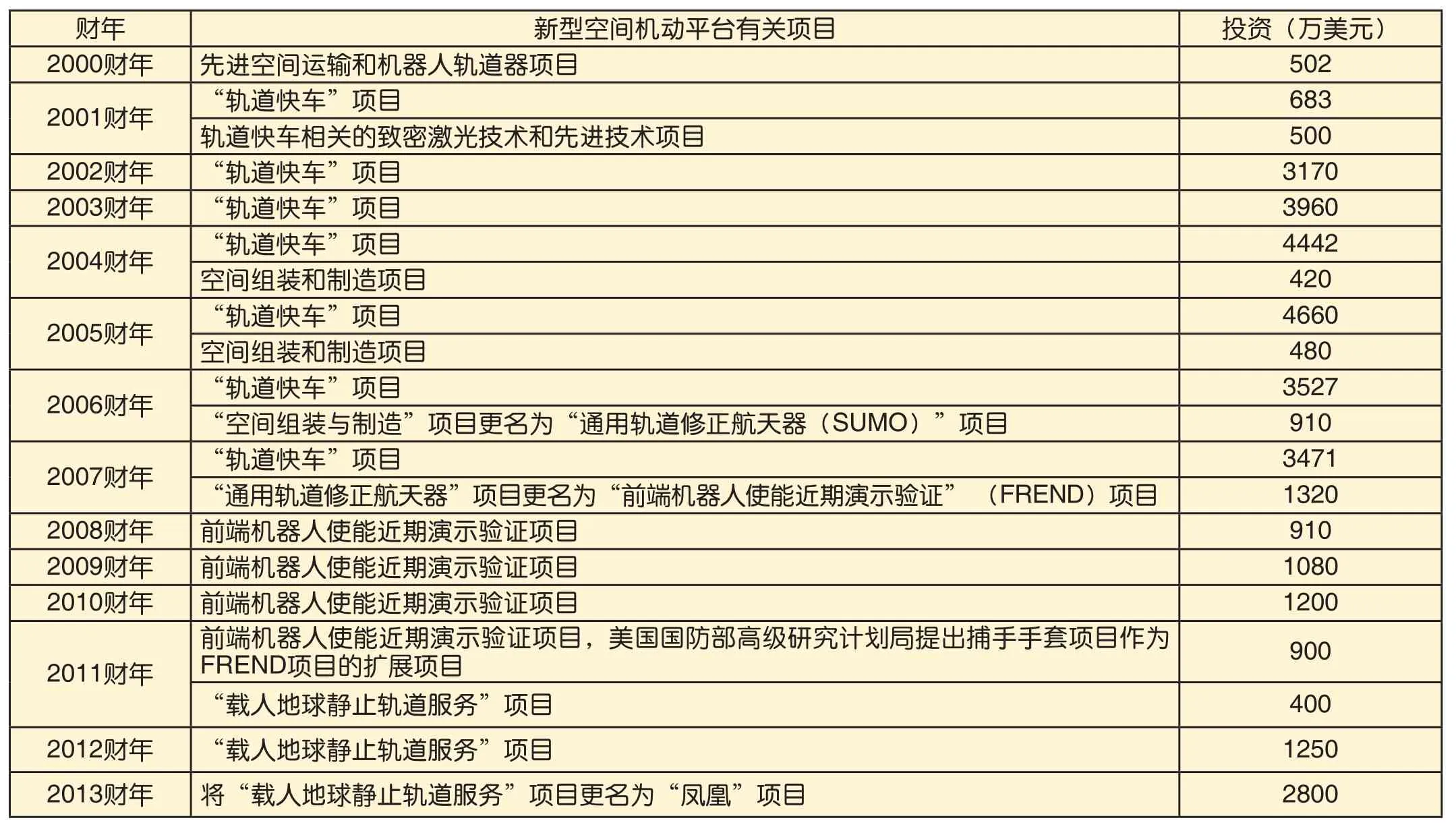
2000財年~2012財年美國國防部高級研究計劃局新型空間機動平臺的投資
在歐洲方面,歐空局、德國航天局和歐洲航空防務航天公司的合作一直沒有間斷,共同開展了自由飛行機器人系統項目、靜地軌道復位者航天器項目、德國軌道服務任務項目等三個重點項目的研制工作。其中自由飛行機器人系統項目還是歐空局、歐洲航空防務航天公司和俄羅斯巴巴金空間中心三家研究機構合作進行的,采用了俄羅斯的多功能軌道推進平臺。
由此看來,在新型空間機動平臺領域特別是技術復雜程度高的項目一般采取了跨部門合作的方式,不僅能凝聚各方力量,而且保證項目目標的順利實現。

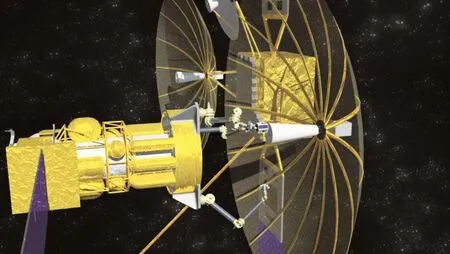
“自主太空運輸機器人軌道器”(左)與“未來星”交會
為有源頭活水來
美國在新型空間機動平臺的發展方面進行了長期的規劃和投資。正是這種持續的推動使得其新型空間機動平臺技術取得了長足進步。
從美國國防部高級研究計劃局各年預算可以看出,美國國防部高級研究計劃局一直以來都在對新型空間機動平臺的發展給予投資。主要包括五個重點項目:“軌道快車”、空間組裝和制造、“通用軌道修正航天器”、“前端機器人使能近期演示驗證”和“鳳凰”計劃。不計2013財年預算,2000財年~2012財年美國國防部高級研究計劃局在新型空間機動平臺方面的總投資為3.3785億美元。如果將2013財年預算計算在內,總投資額為3.6585億美元。可以說這一投資額度并不很大,重要的是體現出一種持續性。
美國航宇局在2003財年預算中提出了DART,從2003財年開始~2005財年,共投入該項目1.1億美元。DART是一種新型的以通過空間機動進行自主交會對接為特征的空間機動平臺,美國航宇局期望通過該項目驗證自主操作和交會所需的制導、導航與控制軟件和硬件,同時驗證模擬碰撞規避機動。在2004財年的預算中,美國航宇局為“航天發射倡議項目”申請10.65億美元經費,其中5.5億美元用于軌道空間飛行項目,同時支持X-37技術驗證。
美國空軍在新型空間機動平臺方面也有長期的規劃發展和資金投入。如X-37B、XSS,但出于保密原因,尚無法獲得在這些項目的投入和預算。
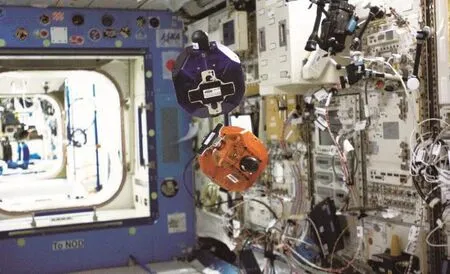
在國際空間站上試驗的小機器人

軍民兩用的機器人
知識鏈接
空間機動平臺機動能力量化分析
空間機動平臺的機動能力究竟能有多大,與什么因素有關是新型空間機動平臺的核心問題之一。目前已經進行的新型空間機動平臺在軌演示驗證都是在同一軌道面內進行的。
影響機動能力的因素
空間機動平臺要進行軌道機動必須要有一定的速度變量,為了獲得這一變量需消耗一定質量的推進劑,所消耗的推進劑質量大小與平臺質量緊密相關。
空間平臺軌道速度大,機動所需的速度變量(ΔV)也很大,需要消耗大量的推進劑。平臺能獲得的速度變量大小與能進行機動次數的多少取決于攜帶的推進劑的數量和類型。一般來說在同一軌道面內改變軌道形狀或高度所需速度變量較小,而改變軌道傾角即改變軌道平面所需的速度變量較大。
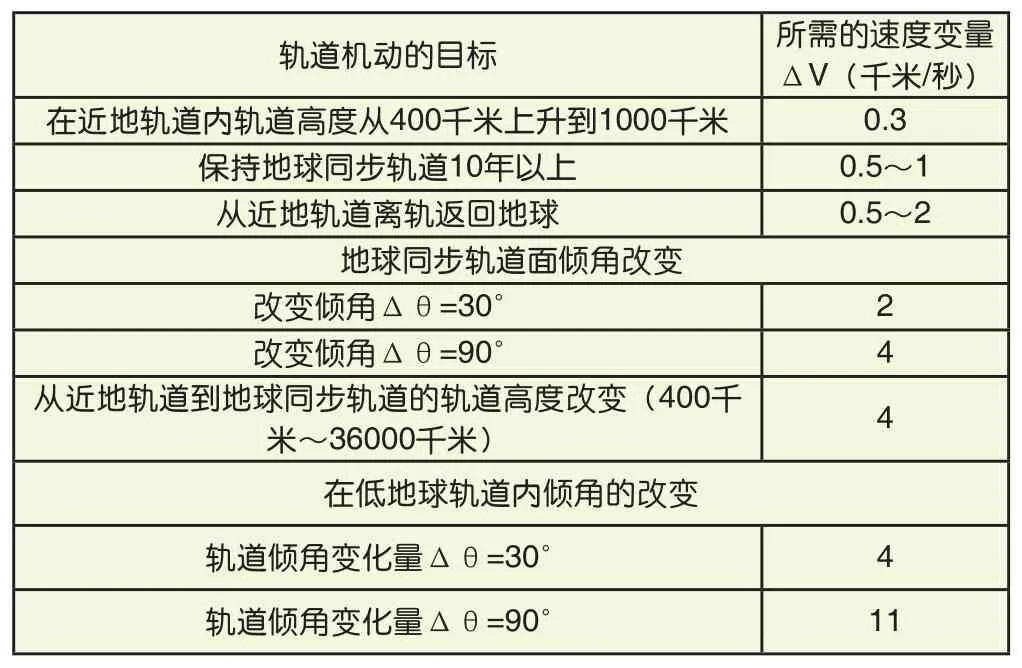
表1 不同類型的空間軌道機動所需的衛星速度變量
空間平臺進行一次機動需要為其提供一個速度變量ΔV,而為了獲得ΔV需要消耗一定質量的推進劑,至于需要消耗多少推進劑則是由推進技術決定的。速度變量ΔV,獲得ΔV所需要消耗的推進劑質量Mp,平臺凈重Ms(不包括Mp),這三者之間的關系由“火箭公式”決定,其關系見表2。
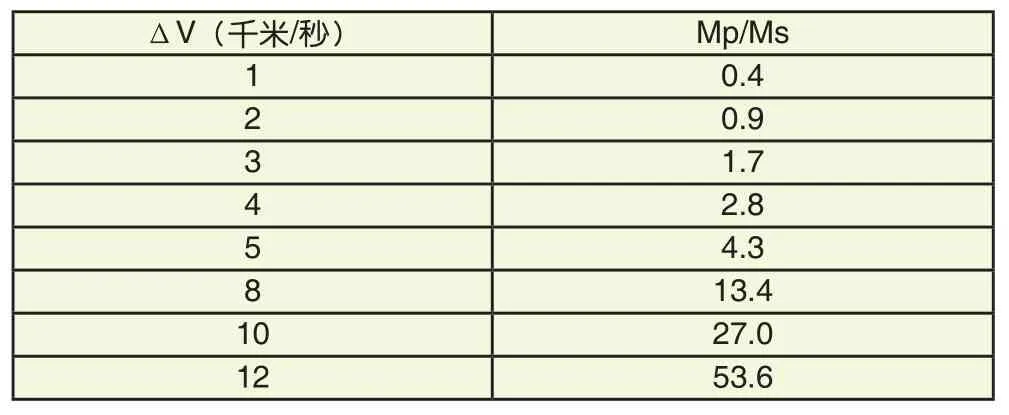
表2 在使用常規化學推進劑的情況下,ΔV與Mp/Ms的關系
目前的空間機動平臺大多采用化學火箭發動機,像電推進、離子推進產生的推力小,沒有被應用到新型空間機動平臺的主動力系統方面。表3列出了使用常規推進劑技術的情況下,各種空間機動所需要消耗的推進劑質量和航天器自重的比值大小。

美國高速驗證機HTV
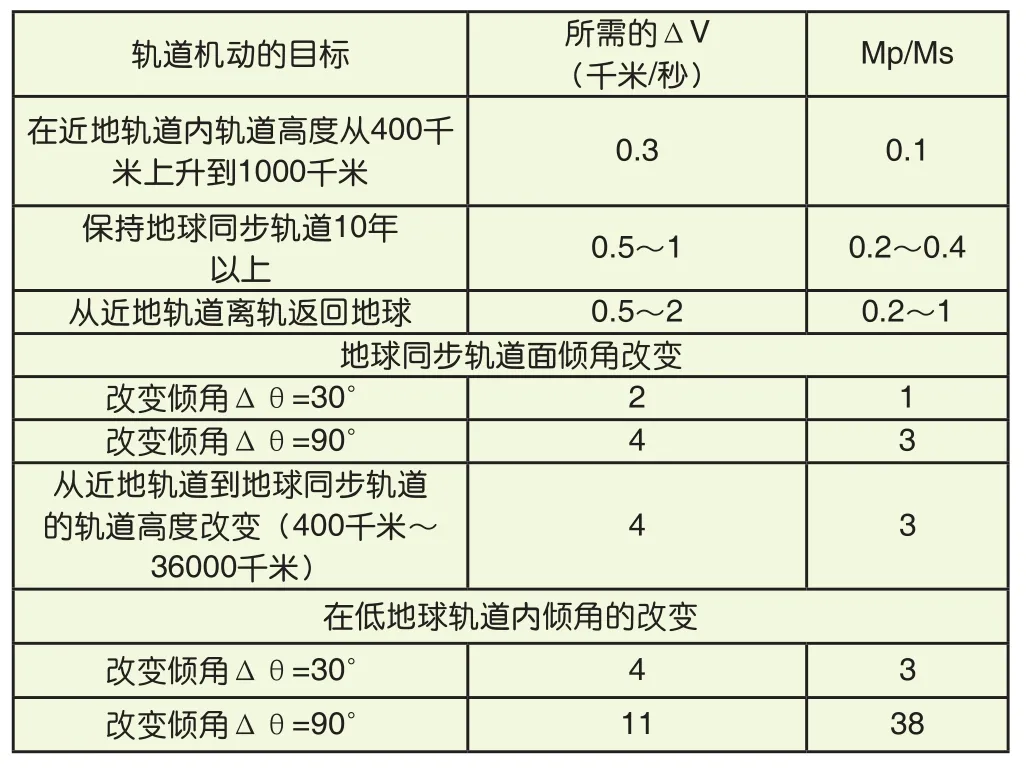
表3 空間機動所需要消耗的推進劑質量和平臺自重的關系
軌道機動能力比較
“空軍實驗衛星系統”微衛星(XSS-11)的總質量145千克、推進劑質量15千克,Mp與Ms的比值為0.115,能產生約每秒0.3千米的速度變量,可在近地軌道完成一次從400千米到1000千米的軌道高度改變,軌道傾角的改變在3°左右。
“軌道快車”平臺總質量952千克、推進劑質量136千克,Mp與Ms的比值為0.167,能產生約每秒0.4千米的速度變量,可完成一次軌道傾角改變5°左右的軌道機動。
X-37B的總質量4990千克、推進劑質量1800千克,其中X-37B需要進行離軌操作,還需要一定質量的推進劑。在不考慮返回的情況下,Mp與Ms的比值為0.564,能產生大約1千米/秒的速度變量。X-37B所實現的最大軌道機動約為一次10°左右的軌道傾角的改變。
這三種新型空間機動平臺在完成上述機動后都將消耗掉全部推進劑,無法再進行其他的機動。由此來看,目前已經進行演示驗證的新型空間機動飛行器的軌道平面改變機動能力十分有限,難以滿足各種不同空間任務的需要,包括部署各種衛星和對地攻擊武器,并在某一指定的空間集合地點對衛星進行檢查、維修和補充燃料。美國軍方最初的這種設想缺乏技術支持。