風電機組時序試驗分析*
2013-12-18 03:56:08蘭涌森陶友傳歐陽海黎劉杰余強
風能 2013年3期
蘭涌森,陶友傳,歐陽海黎,劉杰,余強
(1. 重慶大學電氣工程學院,重慶 400044;2. 國家海上風力發電工程技術研究中心,重慶 401122)
0 引言
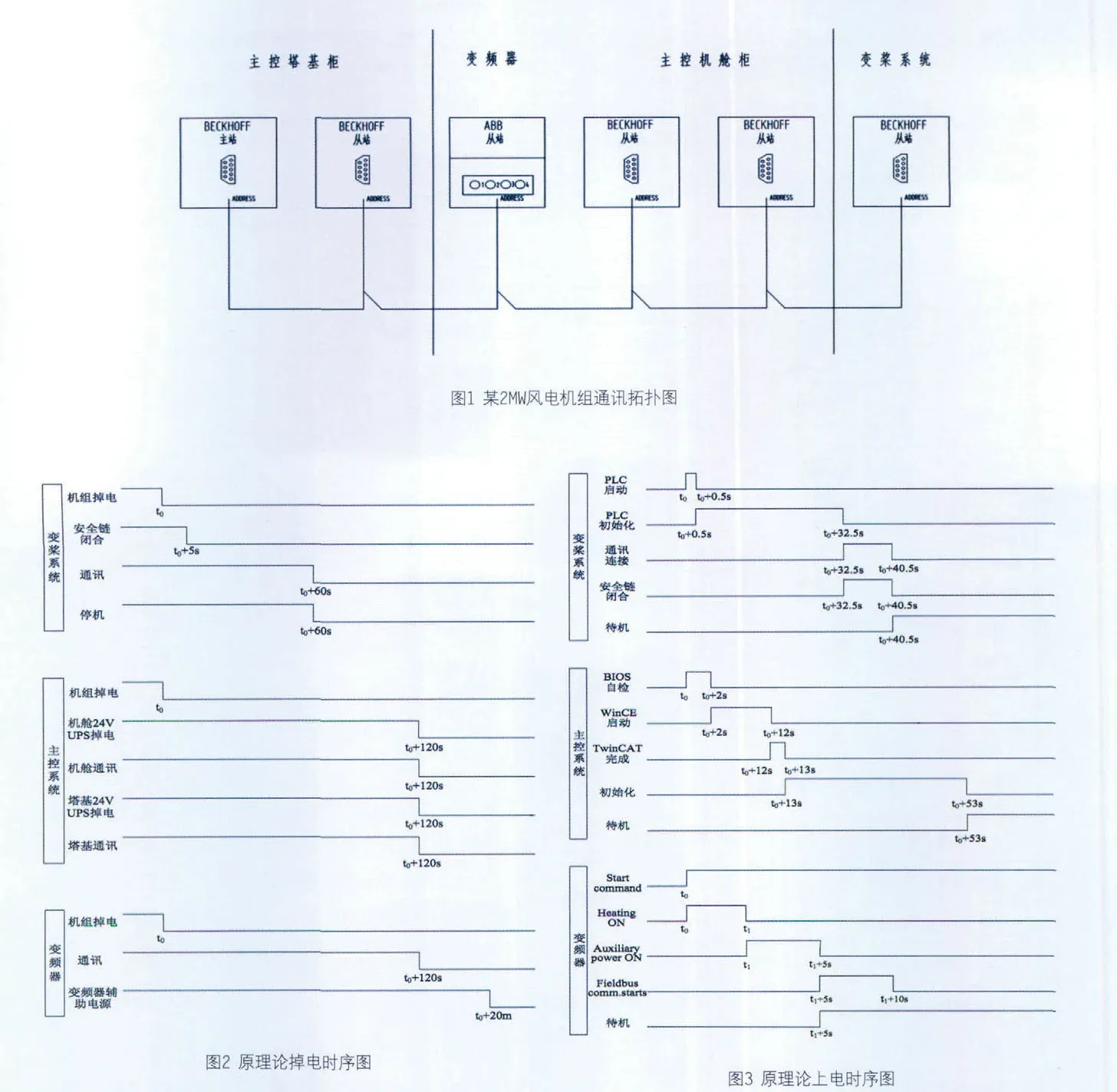
在大型風電機組系統設計中,一般采用由工業PC、I/O和現場總線組件等集合而成的模塊化分布式控制系統,以滿足風電機組的控制需求。此類模塊化控制系統一般安裝于變槳、變頻、主控等電控柜中,組成獨立的主站、從站,實時監測、控制風電機組的運行狀態,并具有完整的維護診斷功能,是風電機組的重要組成部分。正確的時序分析對于深入掌握風電機組運行特性,優化風電機組運行控制具有重要意義。以某2MW風電機組為例,其分布式控制系統通訊拓撲圖見圖1。
可見,該風電機組控制系統由主控塔基柜、變頻器、主控機艙柜、變槳系統4部分子系統組成,共計5個從站、1個主站,主站位于主控塔基柜內。
該風電機組原理論掉電時序見圖2,原理論上電時序見圖3。為便于驗證分析,對該2MW風電機組進行掉電、上電試驗,測試驗證其相應時序。
1 試驗結果
1.1 掉電試驗
從圖2可以看出,若該機組系統發生掉電工況,掉電時間標記為t0,變槳系統將在t0+5s斷開變槳系統安全鏈,在t0+60s關閉后備電源,同時變槳系統從站通訊丟失,進入停機狀態。塔基和機艙的PLC則會在t0+120s關閉其后備電源,同時通訊丟失。變頻器由于專用UPS可提供20min的輔助供電,系統保持運行,但通訊異常。此掉電時序下,由于變槳從站先于其他站點失去通訊,主站無法檢測到變槳通訊存在,必然會報出變槳通訊故障。同時,由于塔基控制柜和機艙控制柜后備電源的供電關閉時間相同,如果由于硬件動作時間差異導致機艙先掉電,機艙所有高電平正常,低電平異常類I/0信號均會因失電而無高電平輸出,主站檢測不到此類信號則報出故障,如發電機保護類故障、防雷器反饋故障等。
為驗證以上分析,將機艙UPS掉電延時時間設置為60s,塔基UPS掉電延時時間設置為80s,進行掉電試驗并通過監控系統進行監控記錄。對表1進行分析可發現,掉電過程所報故障類別主要分為五類:變槳系統掉電必報故障、電網類故障、安全鏈故障、保護類故障和通訊類故障。變槳系統掉電必報故障是系統安全設計,電網類故障則為實際故障;而保護類故障和通訊類故障實際并未發生,屬于掉電過程系統派生故障,是沒有實際意義的,不應該報出。
為進一步驗證時序的合理調整可以避免派生故障的產生,以變槳系統掉電時間為基準,將機艙UPS供電時間設置為60s,塔基UPS供電時間設置為50s進行試驗,調整后該機組新的掉電時序如圖4所示。
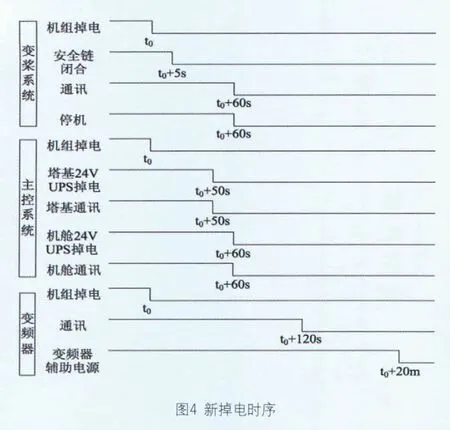
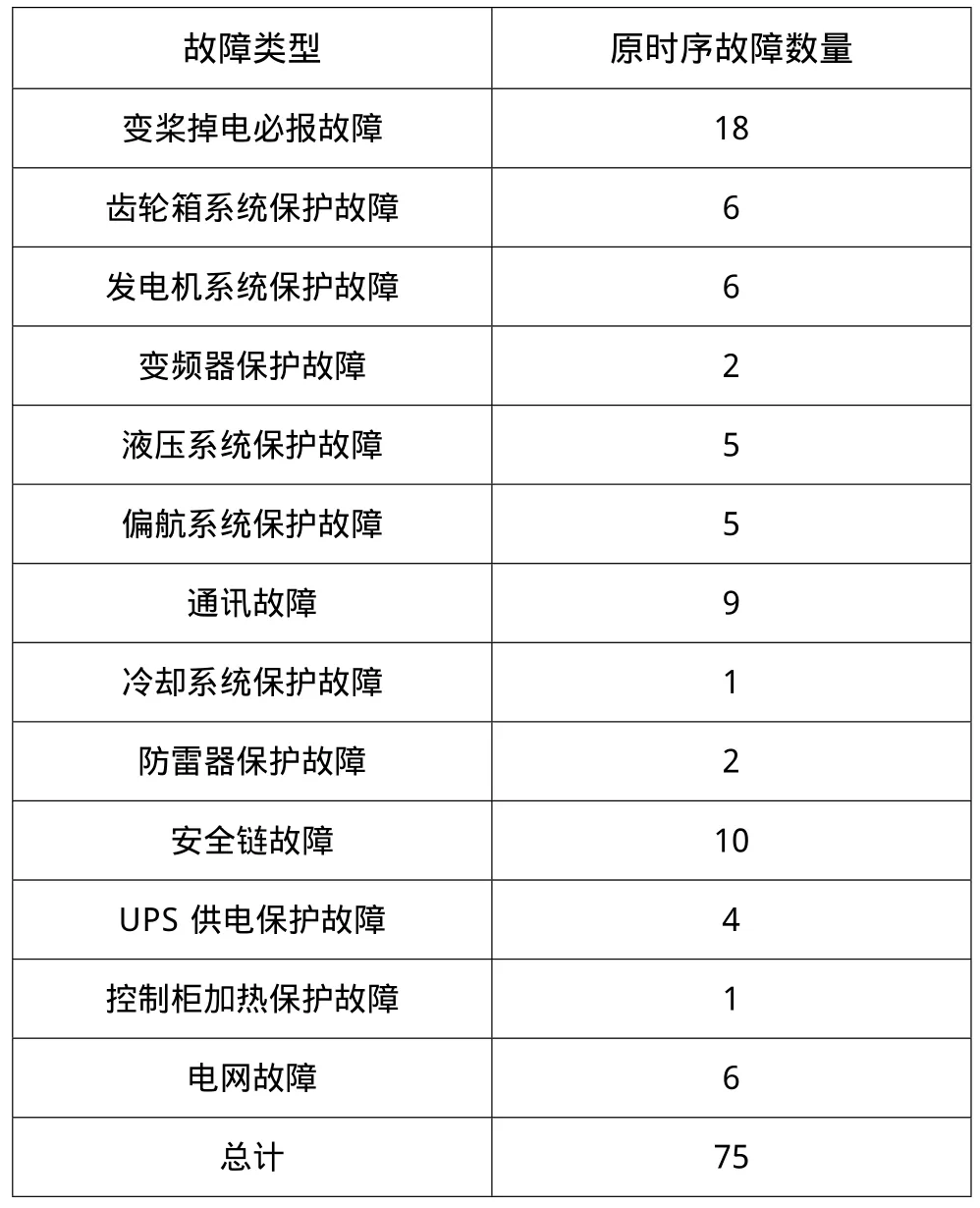
表1 掉電時序故障列表
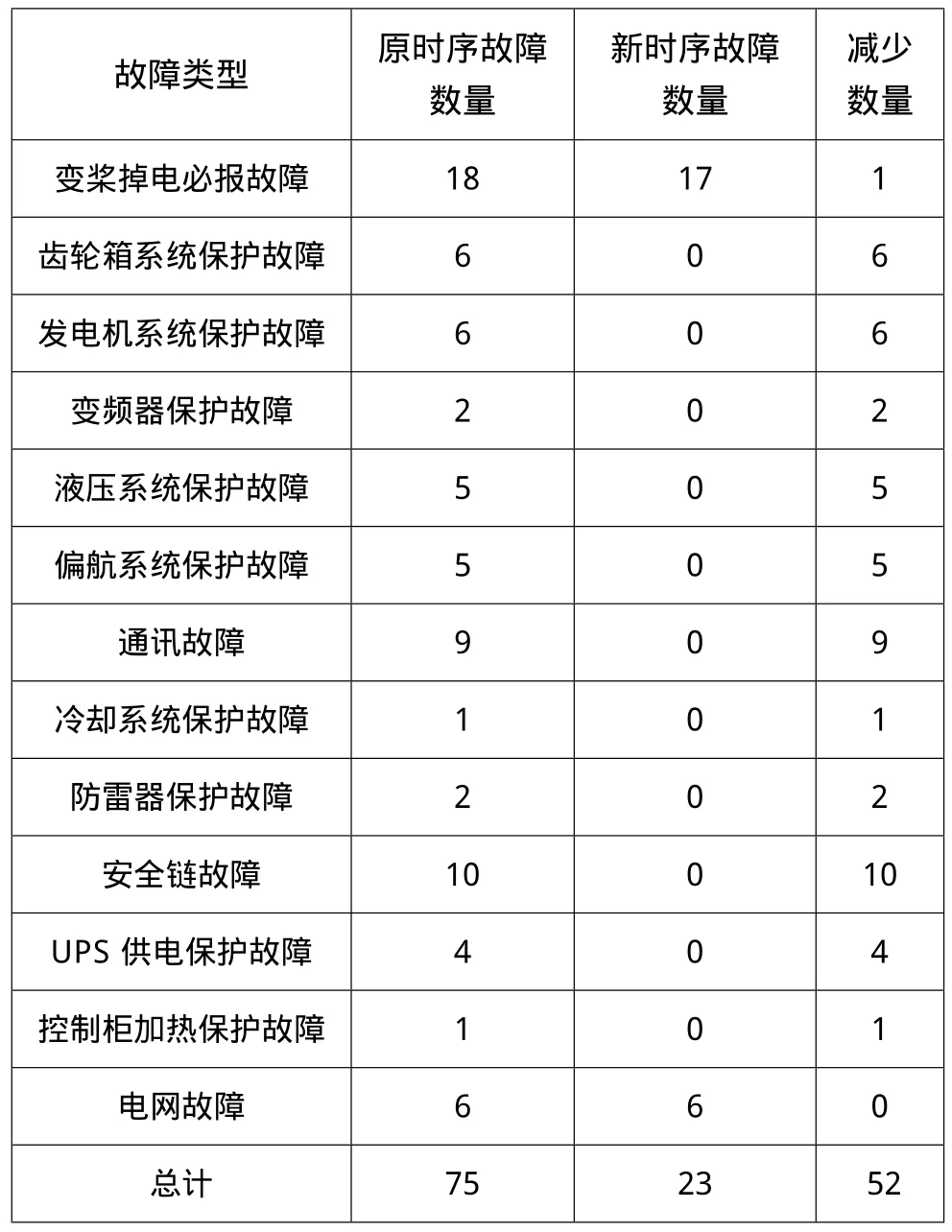
表2 不同時序掉電故障列表對比
由表2可以看出,通過設定UPS持續時間重新調整機組的掉電時序后,機組掉電故障列表中不再有保護類故障和通訊類故障。經過多次重復試驗驗證,在確保機組能夠正常地完成停機動作的前提下,通過掉電時序的調整優化,使機組主控PC在子系統掉電前關閉,可以避免通訊類和保護類共計45個派生故障報出。
1.2 上電試驗
通過對主控系統進行上電啟動測試,得出主控系統PLC的硬件啟動時間在ms級,但是WinCE系統的啟動完成時間大約在t0+30s~t0+32s之間,TwinCAT的啟動完成時間大約在t0+40s~t0+48s之間,詳細結果見圖5。
由于TwinCAT是在WinCE啟動未完成就開始啟動,且TwinCAT的啟動無顯著特征,現場無法通過測試得到TwinCAT準確的啟動時間。通過對WinCE系統啟動過程分析,該系統的基本啟動順序如下:調用Startu函數→OALStartUp函數→KernelStart函數→ARMInit函數→NKStartup函數→KernelSstart函數(此函數調用完成即開始啟動第一個啟動項)→KernelInit函數→FirstSchedule函數(界面啟動完成)。由于啟動項的多少決定了WinCE系統的啟動時間,目前無法明確TwinCAT開始啟動的時間。控制器廠家提供的啟動順序如下:
1.控制器上電 ms級
2.BIOS自檢 2s
3.WinCE系統啟動直到完成 10s
4.TwinCAT系統啟動直到完成 1s
5.System Manager啟動對PLC硬件完成檢查 ms級
6.外部IO信號轉換到輸入緩沖區 ms級
7.輸入緩沖區映射到PLC的I,Q區 us級
8.控制器程序順序執行 ms級
按照控制器廠家的啟動順序,TwinCAT的啟動時序應如圖6所示。
若TwinCAT的啟動時序同控制器廠家的數據一致,則不應出現上電派生故障。那么原因可能有兩種:通訊問題或者System Manager與控制程序的時序實際是顛倒的。通過現場的觀察,硬件的實際啟動時間在ms級,通訊模塊也在2s內恢復正常,通訊問題可排除。System Manager的功能是配置組態、掃描端口,若控制程序比System Manager先完成啟動,控制程序掃描故障信息時System Manager并未完成對端口的掃描工作,而System Manager對I/O端口的默認值為FLASE,則高電平正常低電平故障的I/O端口均會被判斷為故障,通訊類故障同理。
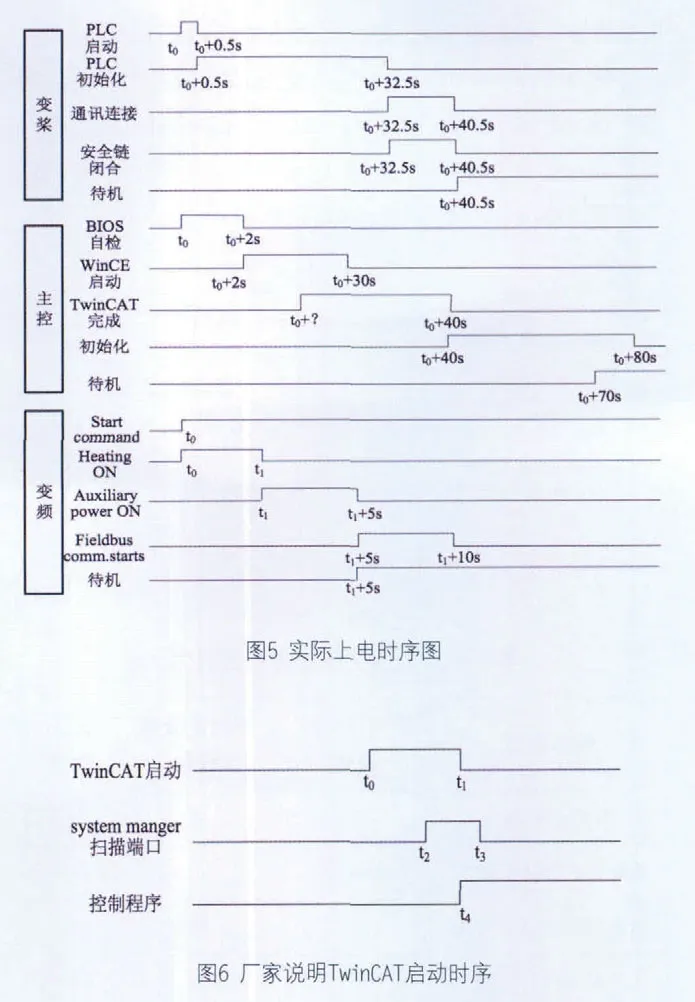

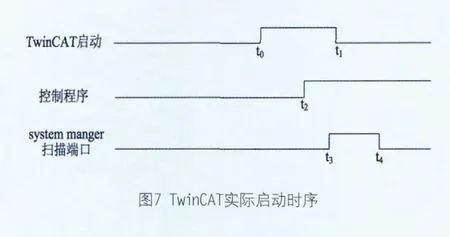

表3 不同時序上電故障列表對比
因此System Manager與控制器程序的時序應進行調整,TwinCAT實際啟動時序應如圖7所示。對機組進行上電啟動試驗驗證分析結論,試驗結果如表3所示。為了進一步測試System Manager與控制程序啟動的實際時序差,即t2與t3。對偏航電機保護故障1、2、3、4分別采取1s、3s、5s、7s的延時處理然后進行上電啟動測試。測試結果表明:延時1s的偏航電機1保護故障每次均報出;延時3s的偏航電機2保護故障時報時不報;延時5s的偏航電機3保護故障和延時7s的偏航電機4保護故障均未報出。因此,可以認為t2與t3的時間差在3s到5s之間。由于保護類故障的報出并無實際意義,可在控制程序中根據t2與t3的時序差對此類故障進行延時處理,確保System Manager對I/O端口的掃描完成先于控制程序對故障的掃描,避免派生故障的報出。調整時序后上電故障列表對比見表3。從表3可以看出,新時序上電故障中除電網故障和安全鏈故障真實存在并報出外,其余保護類故障均未報出,共計減少派生故障40個,真實地還原了故障記錄。
2 結論
本文以某2MW風電機組為例,對風電機組系統掉電、上電時序進行試驗分析,采用重新整定系統時序、增加派生故障觸發延時等方法消除由電網掉電、上電等因素導致的派生故障。結果表明:本文方法能有效消除派生故障,還原真實故障記錄,有利于正確地分析判斷風電機組運行狀態,對優化風電機組運行控制具有重要的指導作用。
[1] 德國倍福電器有限公司.TwinCAT PLC編程手冊[Z].北京:德國倍福電器有限公司北京代表處,2007.
[2] 德國倍福電器有限公司.德國倍福產品選型手冊[Z].北京:德國倍福電器有限公司北京代表處,2008.
[3] 張天成,岳德君.分布式專家系統中時序控制的研究與設計[J].微電子學與計算機,2007,24(10):178-180.
[4] 陳志軍,徐東進.基于TwinCAT的PLC水源地遠程監控系統開發設計[J].電子技術應用,2008(12):95-98.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50