一種新型光梳狀濾波器自動(dòng)裝配系統(tǒng)控制分析
2013-12-23 04:40:02王志明薛靜芳
機(jī)械工程與自動(dòng)化 2013年3期
關(guān)鍵詞:系統(tǒng)
王志明,薛靜芳,陳 杰
(上海交通大學(xué) 機(jī)械工程學(xué)院,上海 200240)
0 引言
PID控制方式是工業(yè)生產(chǎn)中最常用的一種控制方式[1]。傳統(tǒng)的PID 控制器為找到PID 控制系統(tǒng)的最佳參數(shù)KP、Ki、Kd,通常需要大量的計(jì)算量和實(shí)驗(yàn)數(shù)據(jù)。數(shù)字PID 控制器則由軟件管理,具有不改變硬件、只修改軟件就可以實(shí)現(xiàn)參數(shù)設(shè)定的天生優(yōu)點(diǎn)。
光梳狀濾波器是一種可倍增現(xiàn)有光網(wǎng)絡(luò)傳輸容量的新型波分復(fù)用濾波器,已成為光纖通信系統(tǒng)中的關(guān)鍵器件,應(yīng)用前景廣泛。但是,目前光梳狀濾波器主要依靠手動(dòng)生產(chǎn),對(duì)操作人員的要求非常高,因此,實(shí)現(xiàn)光梳狀濾波器件生產(chǎn)的自動(dòng)化無(wú)疑具有非常重要的意義。本文將運(yùn)用PID 控制方式,利用Ziegler-Nichols法進(jìn)行參數(shù)整定,開發(fā)出光梳狀濾波器自動(dòng)化裝配平臺(tái)。
1 光梳狀濾波器原理
圖1為1∶2光梳狀濾波器的工作原理[2]。
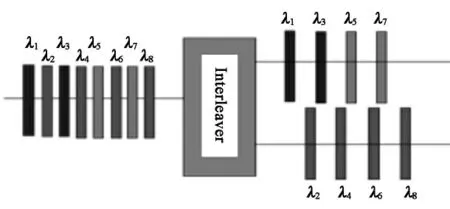
圖1 1∶2光梳狀濾波器的工作原理
Finisar公司(以下簡(jiǎn)稱F 公司)生產(chǎn)的商用光梳狀濾波器單元(Cell),其原理是用一對(duì)可調(diào)節(jié)位置的補(bǔ)償器對(duì)中心波長(zhǎng)進(jìn)行光路耦合,直到找到需要的精確參數(shù)值點(diǎn)。補(bǔ)償器有一定鍥角,通過(guò)前后移動(dòng)補(bǔ)償器來(lái) 調(diào)節(jié)光 程差ΔOPD(optical path different,單 位nm)[3],即可獲得確定的中心波長(zhǎng)λc(nm)和斜率值Slope(比率值,常用dB 來(lái)描述)。運(yùn)用光學(xué)知識(shí)和ITU(International Telecommunication Unit,國(guó)際電信聯(lián)盟)標(biāo)準(zhǔn)的定義,可以簡(jiǎn)化得到λc與ΔOPD之間的關(guān)系:

其中:λA為中心波長(zhǎng)變化范圍值,nm,為與設(shè)定有關(guān)的常量;α為無(wú)量綱常數(shù);A 為幅值,nm,為與材料設(shè)計(jì)有關(guān)的常量;D0為與初始位置有關(guān)的常量,nm;n為整數(shù)。n滿足如下關(guān)系:

由式(1)和式(2)可知,λc與ΔOPD之間是一個(gè)鋸齒波形函數(shù)。斜率值與中心波長(zhǎng)之間存在如下關(guān)系:

其中:λITU為ITU 規(guī)定值。Slope值與ΔOPD之間是另一種傾斜變化的鋸齒波形函數(shù)。實(shí)驗(yàn)測(cè)得與推導(dǎo)一樣,λc值與ΔOPD之間、Slope值與ΔOPD之間有同時(shí)呈線性變化的區(qū)域,并都有滿足要求的交叉點(diǎn)(要求λc不超出設(shè)定值的±5pm,Slope不超過(guò)±0.5dB)。單元裝配系統(tǒng)即是要調(diào)節(jié)找到該點(diǎn)并用紫外光(Ultraviolet,UV)固化膠固化裝配。F公司現(xiàn)有的手動(dòng)調(diào)節(jié)系統(tǒng)平均調(diào)節(jié)時(shí)間超過(guò)30min,并需要非常有經(jīng)驗(yàn)的操作員。設(shè)計(jì)控制系統(tǒng)的目的就是要通過(guò)自動(dòng)調(diào)節(jié)找到該點(diǎn)的位置,并要求調(diào)節(jié)時(shí)間在5min內(nèi)。為此我們需要考慮并解決以下兩個(gè)關(guān)鍵問(wèn)題:①改進(jìn)現(xiàn)有機(jī)構(gòu)、夾具,解決目前中心波長(zhǎng)變化容易超標(biāo)的問(wèn)題;②組建并尋找最優(yōu)組合的驅(qū)動(dòng)→檢測(cè)→控制方式,達(dá)到5min調(diào)節(jié)的目的。
2 自動(dòng)控制系統(tǒng)設(shè)計(jì)與控制理論分析
2.1 構(gòu)建自動(dòng)裝配流程圖及系統(tǒng)參數(shù)設(shè)定與分析
本文通過(guò)靜力學(xué)和動(dòng)力學(xué)有限元分析,得到自動(dòng)裝配系統(tǒng)的3D 主體結(jié)構(gòu)和完整結(jié)構(gòu)設(shè)計(jì),定位和控制精度保證了中心波長(zhǎng)變化在±5pm。圖2 為自動(dòng)化系統(tǒng)的3D 主體結(jié)構(gòu)。
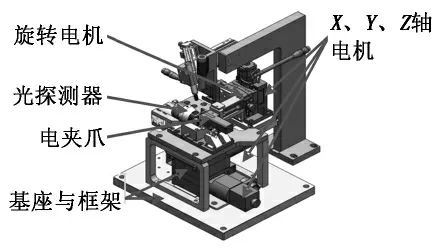
圖2 自動(dòng)化系統(tǒng)的3D 主體結(jié)構(gòu)
自動(dòng)調(diào)節(jié)過(guò)程的控制電路結(jié)構(gòu)框圖見圖3。
根據(jù)分析需要,我們選擇具有PID 控制模塊的NI PCI7344控制器和駿河精機(jī)的XY 交錯(cuò)步進(jìn)電機(jī)KS201-30LHD(最小分辨率為0.5μm,最大速度為0.2mm/s,單軸位移重復(fù)精度為±0.3μm);光功率檢測(cè)儀檢測(cè)參數(shù)需要的時(shí)間約為3s,因此每一步循環(huán)需要約3s的延遲時(shí)間。
2.2 PID 控制系統(tǒng)分析以及參數(shù)整定
按照PID 參數(shù)整定法的設(shè)計(jì)思路,先按照系統(tǒng)的組成寫成不包含PID 控制的相關(guān)傳遞圖。控制器為帶放大的慣性環(huán)節(jié),步進(jìn)馬達(dá)亦作為放大慣性傳遞函數(shù),圖3的控制電路寫成如圖4所示的傳遞函數(shù)。其中,τ0為測(cè)試延遲時(shí)間τ0=3s,e為自然常數(shù),K0、T0為控制器的放大系數(shù)和時(shí)間常數(shù),K1、T1為步進(jìn)馬達(dá)的放大系數(shù)和時(shí)間常數(shù)。前向通道傳遞函數(shù)為:


圖3 自動(dòng)調(diào)節(jié)過(guò)程的控制電路結(jié)構(gòu)框圖

圖4 傳遞函數(shù)
根據(jù)經(jīng)驗(yàn)選擇電機(jī)的性能,可以大致估計(jì)各參數(shù)近似值為:τ0=3s,K0=1.67,T0=4.05s,K1=8.22,T1=1s。利用上述參數(shù)用MATLAB仿真模擬軟件Simulink進(jìn)行模擬[4],得到單位脈沖響應(yīng)傳遞函數(shù)及其開環(huán)單位脈沖響應(yīng)曲線,如圖5所示。
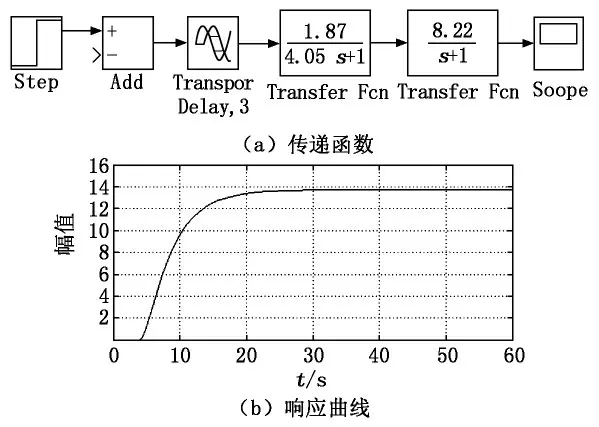
圖5 單位脈沖響應(yīng)傳遞函數(shù)及開環(huán)單位脈沖響應(yīng)曲線
通過(guò)分析可以發(fā)現(xiàn),系統(tǒng)達(dá)到穩(wěn)態(tài)值偏差較大,不能滿足中心波長(zhǎng)的調(diào)節(jié)要求,必須通過(guò)PID 控制器對(duì)控制進(jìn)行整形。運(yùn)用PID 控制方式的傳遞函數(shù)為:

其中:KP為比例系數(shù);Ti為積分時(shí)間常數(shù),s;Td為微分時(shí)間常數(shù),s。這3者都是可調(diào)的參數(shù)。加入PID 控制器后,其傳遞框圖如圖6所示。
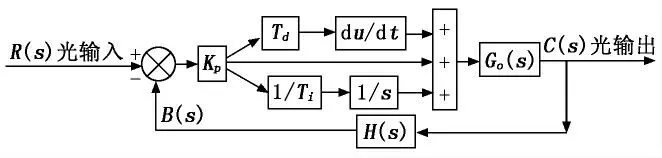
圖6 PID 傳遞框圖
由圖5可以看出,原傳遞函數(shù)的開環(huán)響應(yīng)曲線為S形曲線,帶有時(shí)滯函數(shù),為3階以上傳遞函數(shù),所以圖6可以利用Ziegler-Nichols整定方法求解,按照?qǐng)D5(b)中S形響應(yīng)曲線的參數(shù)求法,大致求得系統(tǒng)延遲時(shí)間τL、放大系數(shù)K 和時(shí)間常數(shù)T 分別為:τL=2.2s,T=5s,K=27.272 7。再利用Ziegler-Nichols法整定控制器參數(shù),最后得到的PID 系數(shù)為:KP=0.1,Ti=4.84s,Td=1.1s。
運(yùn)用MATLAB/Simulink模擬仿真,得到其傳遞函數(shù)及單位階躍響應(yīng)曲線,見圖7。
通過(guò)響應(yīng)曲線,可以大致確定參數(shù)如下:
(1)峰值時(shí)間:tP=10s;
(2)超調(diào)量:σP=(1.25-1)/1×100%=25% ;
(3)調(diào)節(jié)時(shí)間:tS≈16s<5min,在目標(biāo)范圍以內(nèi)。
利用軟件進(jìn)行數(shù)字PID 編程,可以實(shí)現(xiàn)調(diào)節(jié)控制系統(tǒng)的優(yōu)化。

圖7 PID 控制Simulink仿真建模 及單位階躍響應(yīng)曲線
3 結(jié)論
本文介紹了光梳狀濾波器自動(dòng)化裝配平臺(tái)的開發(fā)。基于數(shù)值PID 控制理論,并運(yùn)用MATLAB仿真,結(jié)合Ziegler-Nichols整定方法尋找優(yōu)化參數(shù),構(gòu)成適合本產(chǎn)品項(xiàng)目的數(shù)字PID 控制系統(tǒng)。系統(tǒng)調(diào)節(jié)時(shí)間通常在20s以內(nèi)完成,整個(gè)過(guò)程控制在3min~5min以內(nèi),達(dá)到了設(shè)定的目標(biāo)時(shí)間,比手動(dòng)平均調(diào)節(jié)時(shí)間30min快了6倍。實(shí)測(cè)50 個(gè)產(chǎn)品均達(dá)到了要求,所得到的實(shí)際參數(shù)值與理論參數(shù)值基本吻合,該方法大大提高了生產(chǎn)效率。
[1] 王顯正,莫錦秋,王旭永.控制理論基礎(chǔ)[M].第2版.北京:科學(xué)出版社,2010.
[2] 邵永紅.光學(xué)梳狀濾波器技術(shù)研究[D].上海:中國(guó)科學(xué)院上海冶金研究所,2000:5-25.
[3] 杜騰達(dá),張大鵬.光學(xué)交錯(cuò)器、濾波器單元和色散小的部件設(shè)計(jì):中國(guó),200510078136.5[P].2005-12-14.
[4] 張若青,羅學(xué)科,王民.控制工程基礎(chǔ)及MATLAB 實(shí)踐[M].北京:高等教育出版社,2008.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
