基于VxWorks的多陣面雷達(dá)控制系統(tǒng)的設(shè)計(jì)和實(shí)現(xiàn)
2014-01-01 03:18:20王益民
現(xiàn)代雷達(dá) 2014年8期
袁 志,王益民
(南京電子技術(shù)研究所, 南京210039)
0 引言
大型遠(yuǎn)程警戒雷達(dá)天線由四個(gè)天線陣面組成(以下用A、B、C和D分別代表四個(gè)陣面的陣面號(hào)),每個(gè)陣面的水平掃描范圍為90°,通過(guò)不同陣面的順序切換,實(shí)現(xiàn)360°的全方位水平掃描[1-2],雷達(dá)控制系統(tǒng)只有一套控制和定時(shí),四個(gè)陣面采用統(tǒng)一控制的方式,不能同時(shí)控制多個(gè)陣面實(shí)現(xiàn)多陣面同時(shí)工作,只能完成單一的環(huán)掃方式。
隨著雷達(dá)技術(shù)的不斷發(fā)展,新型雷達(dá)天線陣面采用了數(shù)字陣設(shè)計(jì),數(shù)字陣具有高信雜比、快速自適應(yīng)零點(diǎn)控制和更有效的時(shí)間、能量管理等優(yōu)點(diǎn)。采用新體制對(duì)雷達(dá)各系統(tǒng)也提出了新的研制需求,其中數(shù)字陣控制系統(tǒng)最主要的要求是能夠?qū)γ總€(gè)陣面獨(dú)立控制,可以讓多個(gè)陣面獨(dú)立工作或者某幾個(gè)陣面同時(shí)工作,實(shí)現(xiàn)靈活的掃描方式。獨(dú)立工作指控制單一陣面工作或者控制多陣面輪流工作(即實(shí)現(xiàn)多陣面環(huán)掃的功能),這種方式同一時(shí)間段內(nèi)只有一個(gè)陣面在工作。同時(shí)工作指的是任意兩個(gè)或兩個(gè)以上陣面同時(shí)對(duì)外發(fā)射或接收信號(hào),這要求每個(gè)陣面擁有獨(dú)立的定時(shí)和控制信號(hào),且相互之間不影響,能夠形成獨(dú)立的收發(fā)波束,完成雷達(dá)不同的功能。另外,同時(shí)工作對(duì)系統(tǒng)的時(shí)序、中斷響應(yīng)、系統(tǒng)控制等提出新的要求,本文闡述了雷達(dá)控制系統(tǒng)的設(shè)計(jì)方法以及關(guān)鍵技術(shù)的實(shí)現(xiàn)。
1 系統(tǒng)硬件組成
雷達(dá)控制系統(tǒng)對(duì)雷達(dá)系統(tǒng)多陣面工作進(jìn)行控制調(diào)度,包括接收雷達(dá)任務(wù)計(jì)算機(jī)的指令,實(shí)現(xiàn)對(duì)雷達(dá)工作參數(shù)到天線陣面和其他系統(tǒng)的傳輸及對(duì)頻率源工作的控制。控制定時(shí)器產(chǎn)生雷達(dá)所需各種時(shí)序,傳輸給頻率源和天線陣面等雷達(dá)其他系統(tǒng)。雷達(dá)控制系統(tǒng)包括主控器、同步傳輸模塊、接口控制模塊、定時(shí)器A、定時(shí)器B、定時(shí)器C和定時(shí)器D,四塊定時(shí)器模塊對(duì)應(yīng)四個(gè)陣面,系統(tǒng)硬件框圖如圖1所示。
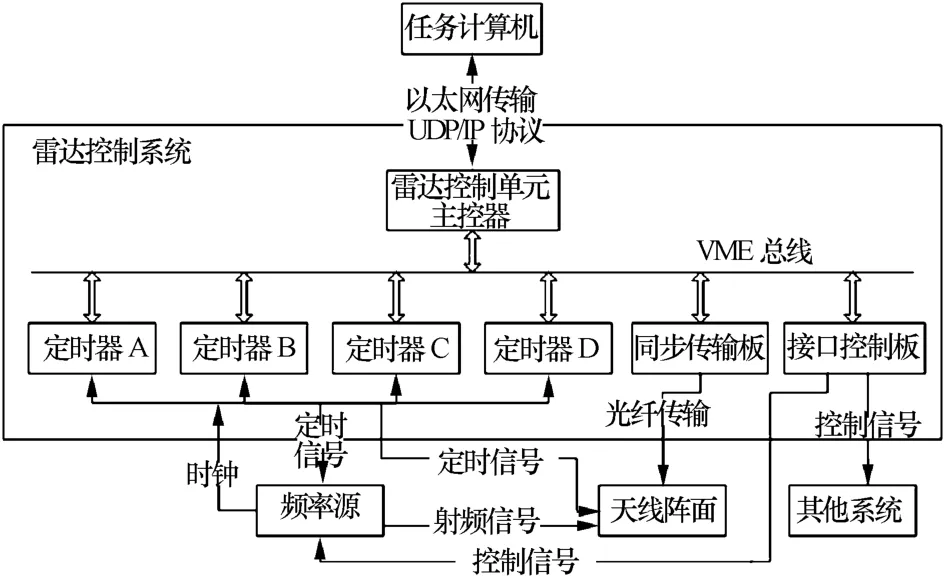
圖1 雷達(dá)控制系統(tǒng)組成
其中,主控器為VME總線的嵌入式計(jì)算機(jī),用來(lái)完成和上層任務(wù)計(jì)算機(jī)的網(wǎng)絡(luò)通信,向系統(tǒng)內(nèi)其他模塊發(fā)送VME命令;同步傳輸板、接口控制板、四塊定時(shí)器都采用FPGA為核心設(shè)計(jì),同步傳輸板主要從VME總線接收主控器命令,通過(guò)FPGA的ROCKETIO高速串行模塊打包發(fā)送四個(gè)陣面的系統(tǒng)控制包信息[3-4],傳送給天線陣面。接口控制板接收VME命令并產(chǎn)生頻率源所需的各種控制信息,通過(guò)快速總線傳輸給頻率源,完成對(duì)頻率源的控制;四塊定時(shí)器主要從VME總線接收工作模式信息,分別產(chǎn)生對(duì)應(yīng)四個(gè)陣面所需的系統(tǒng)定時(shí)信號(hào),在工作周期結(jié)束時(shí)產(chǎn)生VME中斷信號(hào)反饋給雷達(dá)主控器,主控器收到中斷信號(hào)后觸發(fā)中斷服務(wù)任務(wù)運(yùn)行,再發(fā)送下一次的VME命令,從而保證控制系統(tǒng)循環(huán)有序地執(zhí)行。
2 系統(tǒng)軟件組成
2.1 VxWorks操作系統(tǒng)的特點(diǎn)
雷達(dá)控制軟件駐留在雷達(dá)控制系統(tǒng)的計(jì)算機(jī)上,主要功能包括:(1)上層任務(wù)計(jì)算機(jī)的網(wǎng)絡(luò)通信;(2)對(duì)網(wǎng)絡(luò)信息進(jìn)行判斷,放入不同的消息隊(duì)列;(3)產(chǎn)生各模塊所需的控制參數(shù);(4)響應(yīng)定時(shí)器的VME硬件中斷,通過(guò)VME總線向各模塊發(fā)送工作模式命令。具體功能如圖2所示。

圖2 雷達(dá)控制單元功能圖
其工作流程是基于VxWorks實(shí)時(shí)操作系統(tǒng)的中斷服務(wù)任務(wù)和VME總線的多中斷為核心來(lái)實(shí)現(xiàn)[5-7]。VxWorks具有較好的兼容性和可移植性,具體特點(diǎn)有以下五點(diǎn)[8-10]:
(1)實(shí)時(shí)性強(qiáng):最大響應(yīng)時(shí)間≤10 μs。
(2)高效的任務(wù)管理:管理任務(wù)數(shù)目不限,具有256個(gè)優(yōu)先級(jí),采用基于優(yōu)先級(jí)的搶占式調(diào)度策略,同時(shí)也提供了輪轉(zhuǎn)調(diào)度算法。
(3)快速靈活的任務(wù)間通信:任務(wù)間通信手段靈活,有信號(hào)量、管道、消息隊(duì)列、信號(hào)、網(wǎng)絡(luò)套接字和共享內(nèi)存等。
(4)高效的中斷和異常事件處理:中斷服務(wù)程序在特定的空間運(yùn)行,不同于其他任何任務(wù),因此中斷處理沒(méi)有任務(wù)的上下文切換。
(5)VxWorks網(wǎng)絡(luò)能與許多運(yùn)行其他協(xié)議的網(wǎng)絡(luò)進(jìn)行通信,如 TCP/IP、4.3BSD、NFS、UDP、SNMP、FTP 等。
2.2 多陣面控制系統(tǒng)設(shè)計(jì)
單陣面工作是多陣面工作方式的基礎(chǔ),實(shí)際工作中主要是多陣面同時(shí)工作,多陣面輪流工作的方式。這也使得系統(tǒng)的復(fù)雜度提高,新型數(shù)字陣?yán)走_(dá)控制系統(tǒng)的特點(diǎn)如下三點(diǎn):
(1)數(shù)字陣需要多陣面同時(shí)工作,所以存在四個(gè)獨(dú)立中斷服務(wù)任務(wù),區(qū)別于以往的一個(gè)中斷服務(wù)任務(wù)。
(2)數(shù)字陣系統(tǒng)有四塊定時(shí)器,并且四塊定時(shí)器工作模式、脈沖個(gè)數(shù)、周期、脈寬等受控參數(shù)也不一定相同,有四個(gè)VME中斷;而以往多陣面共用一塊定時(shí)器,并且每個(gè)陣面定時(shí)信號(hào)相同,只有一個(gè)VME定時(shí)中斷。
(3)數(shù)字陣系統(tǒng)中不僅有陣面號(hào)控制射頻信號(hào)的開(kāi)關(guān),四個(gè)陣面定時(shí)和控制信號(hào)也是獨(dú)立的;而以往陣面切換僅僅靠陣面號(hào)去控制射頻信號(hào)的開(kāi)關(guān)。
下面將具體介紹多陣面工作時(shí)雷達(dá)控制系統(tǒng)的運(yùn)行。
2.2.1 單陣面工作
單陣面工作時(shí)只有一個(gè)中斷服務(wù)任務(wù)執(zhí)行,可以看作多陣面輪流工作的一個(gè)特殊情況。工作流程如圖3所示。
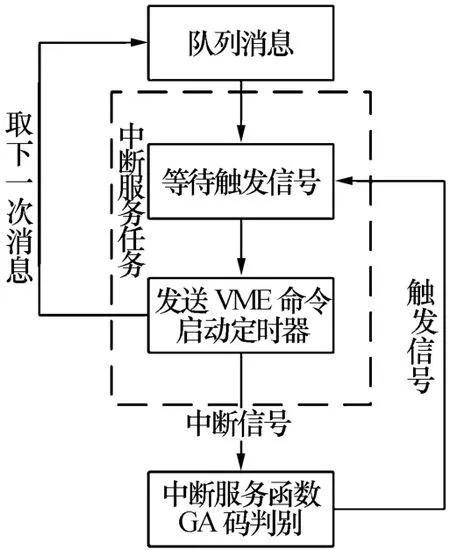
圖3 單陣面工作流程圖
單陣面工作是典型的中斷服務(wù)處理任務(wù),任務(wù)獲取隊(duì)列消息,等待中斷觸發(fā)信號(hào)到來(lái)后執(zhí)行任務(wù),任務(wù)完成再次獲取隊(duì)列消息,循環(huán)執(zhí)行。以中斷信號(hào)作為觸發(fā)保證了上一個(gè)工作周期已經(jīng)結(jié)束,然后立即轉(zhuǎn)入下一工作周期任務(wù)。
2.2.2 多陣面輪流工作
多陣面輪流工作時(shí),多個(gè)中斷服務(wù)任務(wù)輪流運(yùn)行,在同一時(shí)間內(nèi)只有一個(gè)中斷服務(wù)任務(wù)處理消息命令,消息命令的處理狀態(tài)如圖4所示。
工作中陣面不切換時(shí),中斷服務(wù)任務(wù)響應(yīng)的中斷信號(hào)就是對(duì)應(yīng)定時(shí)器的中斷信號(hào)。陣面切換時(shí),中斷服務(wù)任務(wù)響應(yīng)的中斷信號(hào)不是對(duì)應(yīng)定時(shí)器的中斷信號(hào),而是上一個(gè)工作陣面定時(shí)器的中斷信號(hào)。舉例說(shuō)明:在A陣面中斷服務(wù)任務(wù)執(zhí)行時(shí),定時(shí)器A產(chǎn)生中斷信號(hào),從A陣面轉(zhuǎn)到B陣面的時(shí)候,為了保證無(wú)縫連接,B陣面的中斷服務(wù)任務(wù)執(zhí)行第一個(gè)消息時(shí)的觸發(fā)中斷信號(hào)應(yīng)該是A陣面定時(shí)器最后一個(gè)中斷信號(hào);以此類推,在每個(gè)陣面切換時(shí)都如此。具體在設(shè)計(jì)中不僅要知道當(dāng)前消息的陣面號(hào),還要知道上一個(gè)消息命令的陣面號(hào),通過(guò)兩個(gè)陣面號(hào)判斷有沒(méi)有變換陣面,在變換時(shí)就要做特別的判斷處理了,否則只以本陣面定時(shí)器中斷為觸發(fā)條件。以B陣面為例,如圖5所示。

圖4 輪流工作消息狀態(tài)圖
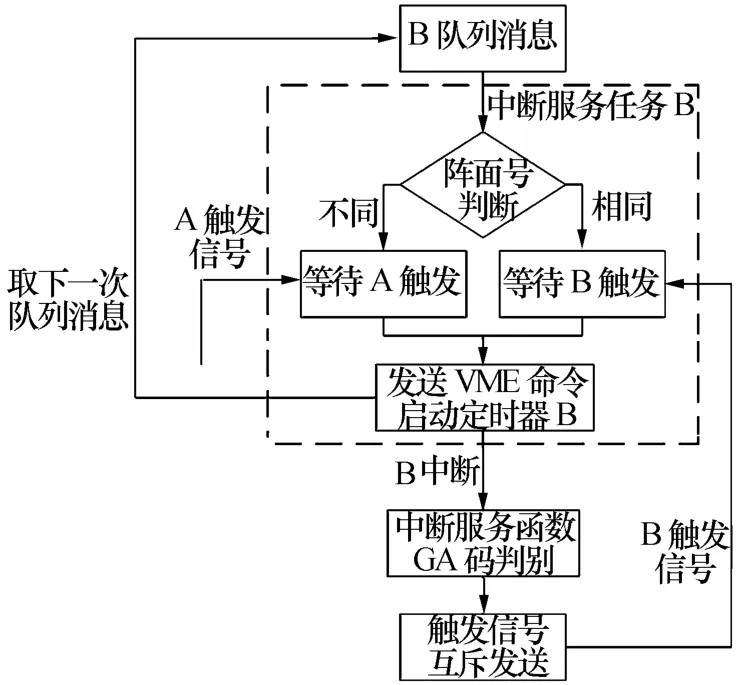
圖5 輪流工作流程圖
由圖5可以看出,通過(guò)存儲(chǔ)的上一次執(zhí)行的中斷服務(wù)任務(wù)的陣面號(hào)和本次陣面號(hào)比較,得出陣面有沒(méi)有變換,同時(shí)也看出這種方式不僅僅可以實(shí)現(xiàn)多陣面環(huán)掃,理論上四個(gè)陣面可以執(zhí)行類似亂序的輪流工作方式。
2.2.3 多陣面同時(shí)工作
多陣面同時(shí)工作時(shí),網(wǎng)絡(luò)消息通過(guò)陣面號(hào)區(qū)別后放入不同的消息隊(duì)列,每個(gè)中斷服務(wù)任務(wù)各自執(zhí)行。以下是A、B雙陣面工作時(shí)中斷服務(wù)任務(wù)處理消息命令的狀態(tài)如圖6所示。
在多陣面同時(shí)工作時(shí),要區(qū)分每個(gè)定時(shí)器的VME中斷信號(hào),由于定時(shí)器共用同一優(yōu)先級(jí)的中斷信號(hào),區(qū)分中斷的方法只有通過(guò)中斷向量來(lái)區(qū)分,設(shè)計(jì)中采用VME總線的 GAP,GA[0~4]信號(hào)作為中斷向量,GAP,GA[0~4]信號(hào)是由模塊在機(jī)箱物理插槽位置來(lái)決定的,這樣就可以區(qū)分不同定時(shí)器中斷信號(hào)。A、B雙陣面同時(shí)工作時(shí)流程圖如圖7所示。
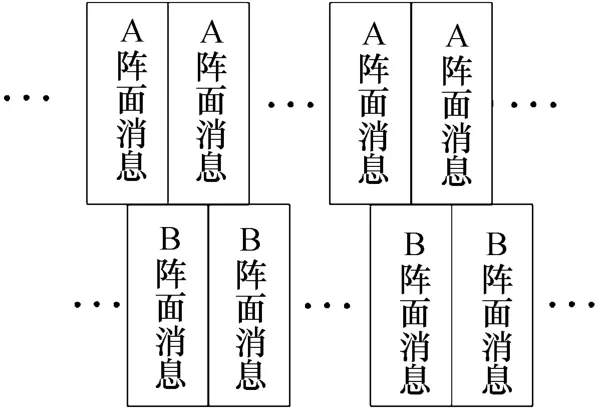
圖6 同時(shí)工作消息狀態(tài)圖
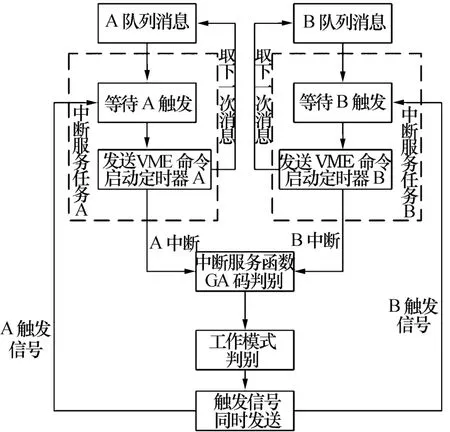
圖7 同時(shí)工作流程圖
由圖7可以看出多陣面同時(shí)工作時(shí)定時(shí)器中斷信號(hào)只會(huì)轉(zhuǎn)換為對(duì)應(yīng)中斷服務(wù)任務(wù)的觸發(fā)信號(hào)。也就是有且僅有本陣面定時(shí)器中斷能觸發(fā)對(duì)應(yīng)的中斷服務(wù)任務(wù)。而工作模式的判別使多陣面的多個(gè)觸發(fā)信號(hào)不再互斥,能夠同時(shí)觸發(fā),滿足同時(shí)工作的要求。
3 結(jié)束語(yǔ)
本文所闡述的多陣面雷達(dá)控制系統(tǒng)采用基于Vx-Works操作系統(tǒng)設(shè)計(jì),利用了VxWorks操作系統(tǒng)的多任務(wù)工作特性,高效獨(dú)立的中斷處理能力,以及網(wǎng)絡(luò)通信等功能,實(shí)現(xiàn)了雷達(dá)多陣面同時(shí)工作和多陣面輪流工作的方式,大大提高了雷達(dá)工作的多功能性和靈活性。目前該系統(tǒng)已經(jīng)在某數(shù)字多陣面陣?yán)走_(dá)上得到應(yīng)用。
[1] 酈能敬.預(yù)警機(jī)系統(tǒng)導(dǎo)論[M].北京:國(guó)防工業(yè)出版社,1998.Li Nengjing.Introduction of airborne early warning system[M].Beijing:National Defense Industry Press,1998.
[2] 陳國(guó)海.下-代預(yù)警雷達(dá)技術(shù)[J].現(xiàn)代雷達(dá),2010,32(3):1-4.Chen Guohai.Technologies for next generation airborne early warning raIdar[J].Modern Radar,2010,32(3):1-4.
[3] 林振華.基于PCI-X和RocketIO的高速數(shù)據(jù)傳輸系統(tǒng)設(shè)計(jì)[J].現(xiàn)代雷達(dá),2011,33(6):49-52,57.Lin Zhenhua.Design and implementation of high-speed data transmission system based on PCI-X and rocketIO[J].Modern Radar,2011,33(6):49-52,57.
[4] 杜 旭,于 洋,黃 建.基于FPGA的高速串行傳輸接口的設(shè)計(jì)與實(shí)現(xiàn)[J].計(jì)算機(jī)工程與應(yīng)用,2007,43(12):94-96.Du Xu,Yu Yang,Huang Jian.Design and implementation of high-speed serial transmission interface based on FPGA[J].Computer Engineering and Applications,2007,43(12):94-96.
[5] Wind River System S,Inc..VxWorks BSP Developer's Guide,V5.5[Z].[S.l.]:Wind River Systems,Inc.,2003.
[6] Wind River System S Inc..VxWorks OS Libraries API Reference,V5.5[Z].[S.l.]:Wind River Systems,Inc,2003.
[7] 黃銀園.VxWorks操作系統(tǒng)在多功能相控陣?yán)走_(dá)中的應(yīng)用[J].現(xiàn)代雷達(dá),2001,23(4):46-48.Huang Yinyuan.Application of VxWorks operating system in multifunctional phased array radar[J].Modern Radar,2001,23(4):46-48.
[8] 王學(xué)龍.嵌入式VxWorks系統(tǒng)開(kāi)發(fā)與應(yīng)用[M].北京:人民郵電出版社,2003.Wang Xuelong.The development and application of embedded VxWorks system[M].Beijing:Posts and Telecommunication Press,2003.
[9] 周啟平,張 楊,吳 瓊.VxWorks開(kāi)發(fā)指南與Tornado實(shí)用手冊(cè)[M].北京:中國(guó)電力出版社,2004.Zhou Qiping,Zhang Yang,Wu Qiong.Development guide of VxWorks and of Tornado[M].Beijing:China Electric Power Press,2004.
[10] 孔祥營(yíng),柏桂枝.嵌入式實(shí)時(shí)操作系統(tǒng)VxWorks及其開(kāi)發(fā)環(huán)境 Tomado[M].北京:中國(guó)電力出版社,2001.Kong Xiangying,Bai Guizhi.Embedded real-time operation system VxWorks and development environmen Tomado[M].Beijing:China Electric Power Press,2001.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
今日農(nóng)業(yè)(2019年12期)2019-08-15 00:56:32
今日農(nóng)業(yè)(2019年10期)2019-01-04 04:28:15
今日農(nóng)業(yè)(2019年16期)2019-01-03 11:39:20
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45