雷達陣地雜波測量和動態STC建立方法
2014-01-01 03:18:32張峰
現代雷達 2014年4期
關鍵詞:設置
張 峰
(南京電子技術研究所, 南京210039)
0 引言
雷達回波包括目標回波、雜波回波和干擾回波等。雷達雜波包括面雜波和體雜波,面雜波主要包括地雜波和海雜波,體雜波主要包括云、雨雜波和箔條干擾等。雷達地雜波的大小取決于雷達系統參數和照射地面參數。雷達系統參數包括距離、工作波長、發射功率、距離分辨率、波束寬度(照射面積、角度分辨率)、波束指向和天線極化方式等。地面參數一般指地面反射系數,包括導電率、介電常數和地面粗糙度[1]。
一般來說,地面導電率和介電常數越大,地面越粗糙,則反射系數越大,地物回波越強。布滿森林和灌木的丘陵回波明顯高于光禿禿的丘陵回波。地面濕度越大,則介電常數越大,造成反射的回波越強。對相同的地物環境,地物回波在下雨時會比天氣干燥時強。
地面、海面、箔條干擾、云雨所產生的雜波特性與熱噪聲相似,其幅度和相位都是隨機起伏的,一般情況下,具有瑞利分布函數特性,但其頻譜特性比白噪聲窄得多。雜波對目標檢測的影響等同于接收機的基底噪聲,會造成雷達有效探測的目標淹沒在雜波中而不能正常檢測,或降低目標檢測概率。
由于隨風而動的物體會產生一定的相移,造成雷達照射波束發射頻譜的展寬,所以主要由森林、灌木和草地等覆蓋的地面比沙漠、戈壁等覆蓋地面回波頻譜更寬,并且在大風速條件下,地雜波頻譜展寬更大。
利用動目標回波和固定地物回波的多普勒頻移特性不同進行雜波抑制,通常采用動目標顯示(MTI)、動目標檢測(MTD)或脈沖多普勒(PD)檢測方法抑制地物雜波的影響。
1 雷達靜態STC對地雜波的抑制效果分析
雷達進行全程搜索時,如果接收機通道增益較高,同樣接收機靈敏度也較高,則近程雜波會使接收機飽和,造成地雜波頻譜的大大展寬,使得雷達不能很好地抑制地雜波,而無法檢測目標回波;如果把接收機通道增益調得太低,雖然近程雜波回波不過載,但接收機靈敏度太低,影響遠區目標的檢測。為了解決這個矛盾,現代雷達一般采用數字靈敏度時間控制(STC)[2]電路。在每個發射脈沖之后,隨時間在射頻(RF)、中頻(IF)或在接收機前端的饋線中通過數控衰減器對接收機通道增益進行某種規律的控制,近距離時可降低接收機通道增益和靈敏度,遠距離時保持原來的增益和靈敏度,以保證正常發現和檢測小目標信號回波。
數字STC電路具有控制靈活,控制信號可隨雷達周圍的環境預先或實時編程的特點,可以有效地提高接收機的抗過載能力。對射頻和中頻衰減盡量采用先射頻衰減,再中頻衰減的方式進行數控衰減器控制,防止接收機系統前端飽和。
常規雷達一般采用靜態STC,一般預先設置一組或幾組靜態STC曲線。根據式(1)、式(2)、式(3),可得到雷達全程理論靜態STC。實際靜態STC曲線要綜合考慮接收機衰減器調節范圍和好的工程實現,圖1為三坐標雷達的一條靜態STC曲線。
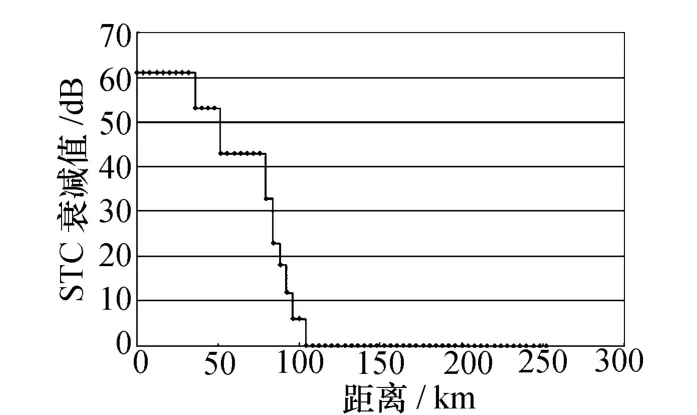
圖1 靜態STC曲線示意圖
雷達在不同陣地,即使同一陣地在不同氣象等條件下,實際雜波強度不可預計,常常會造成接收通道飽和,引起地雜波頻譜的大大展寬,從而使雷達不能很好地抑制地雜波,造成雜波剩余太多,雷達錄取性能下降;或者設置的STC衰減太大,造成雷達小目標探測能力下降。
現在有些雷達的靜態STC曲線可采用手動方式現場調整,雜波剩余狀況略有改善,但一般只對雜波較大的某一方位設置靜態STC曲線,其他方位同樣會出現小目標探測能力下降的問題。如對所有方位、仰角均手動設置STC曲線,工作量太大,很難完成。
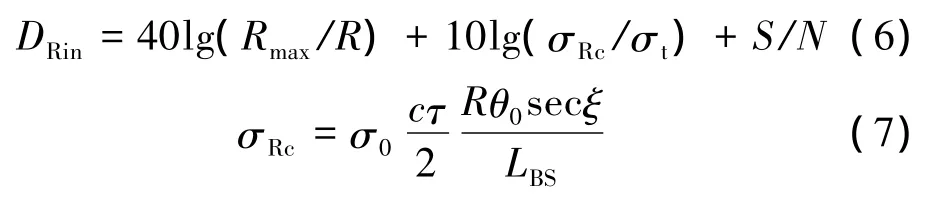
雷達最大輸入動態范圍Din計算方法為
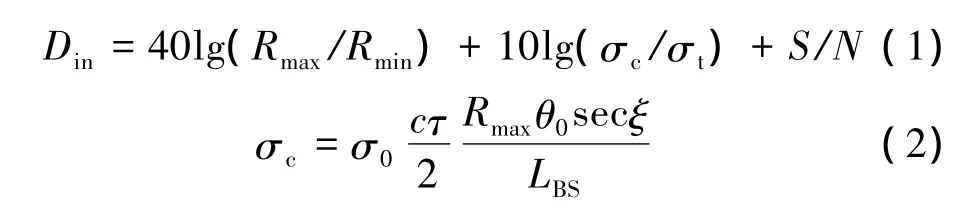
式中:σ0=0.000 32/λ0,σ0為面雜波反射系數,λ0為雷達波長;c為光速,c=3×108m/s;τ為脈壓后脈沖寬度;Rmax為最大作用距離;Rmin為最小作用距離;θ0為方位波束寬度,單位為rad;ξ為最大方位掃描角;LBS為波束形狀損失;σt為目標RCS;σc為雜波面積;S/N為單一脈沖檢測信噪比。
若式(1)的Rmin改為R,即為距離R處輸入動態范圍DRin,輸出動態范圍為Dout(線性動態范圍),即可得到距離R處的STC值DRSTC

2 雷達動態STC對地雜波的抑制效果分析
雷達到達陣地后,如果有方法自動測量覆蓋范圍內所有方位和仰角的實際雜波強度,建立不同方位、仰角、距離的雷達陣地雜波圖,應用一定的算法,計算出不同方位、仰角、距離的動態STC值,建立雷達動態STC曲線,則可解決靜態STC帶來的問題。
一般情況下,對雷達方位覆蓋可根據方位波束寬度進行等分,也可略大于波束寬度;仰角覆蓋可根據搜索仰角波位進行分層;距離上的分段一般根據接收機EPROM存儲量進行劃分,不需全程進行STC設置,因為遠區不需通道增益調整。STC衰減的最小量化單元越精細越好,但從工程實現上,一般情況下最小量化單位為1 dB或2 dB對系統已足夠。
例如,雷達方位波束寬度1.2°,360°方位覆蓋,仰角搜索波位13個,最大作用距離400 km,最小作用距離15 km,可建立的動態STC為方位256等分,仰角分為13層,距離按4 km進行量化,STC衰減最小量化刻度1 dB。該雷達實測陣地雜波如圖2所示。采用靜態STC曲線雜波剩余情況如圖3所示,采用動態STC雜波剩余情況如圖4所示。
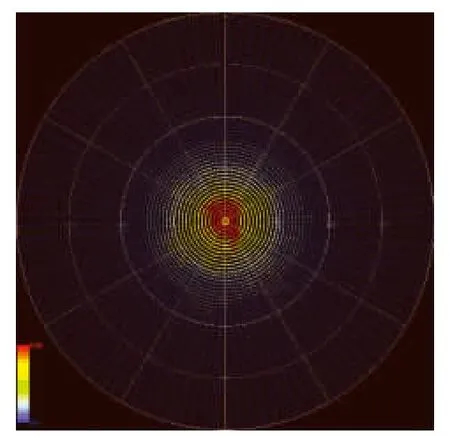
圖2 雷達實測陣地雜波
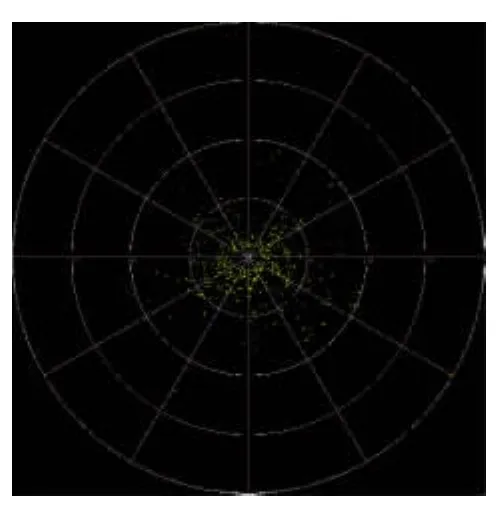
圖3 雷達靜態STC雜波剩余情況
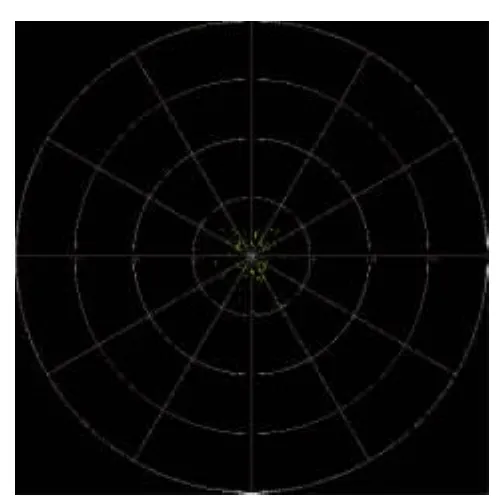
圖4 雷達動態STC雜波剩余情況
采用動態STC后單圈雜波剩余由約600個減為約50個,雜波抑制效果明顯改善。若結合雷達剩余雜波圖進行雜波濾除,基本可以實現雷達全程自動錄取。
下面分別介紹模擬相控陣雷達和數字陣列雷達陣地雜波圖測量和動態STC建立方法。
3 模擬相控陣雷達動態STC建立方法
模擬相控陣雷達是指相控陣天線發射波束和接收波束采用強制饋電或空間饋電集中形成[3]。模擬相控陣雷達接收機系統分為集中式接收機和分布加集中式接收機。集中式接收機是指饋電網絡形成接收波束后才進入接收機系統進行信號放大和變頻。分布加集中式接收機是指在饋電網絡中先進行接收信號的部分放大,在接收波束形成后進行合成接收信號的放大和變頻。
3.1 集中式接收機動態STC建立方法
對于集中式接收機,最大輸入動態范圍Din一般為90 dB~100 dB,輸出動態范圍Dout一般為50 dB ~60 dB。考慮到強雜波的影響,根據工程經驗,STC的設計范圍DSTC一般設置為

其中,DSTC的射頻STC值DRFSTC和中頻STC值DIFSTC一般對半設置。
一般情況下,在接收機不設置STC時,近距離通道會飽和。可設計一路對數放大接收機,在不設置STC時,近距離通道也不會飽和,可用于測量近距離強雜波信號。
采用對放接收機測量距離R處陣地雜波,計算動態STC值DRSTC的方法如下:
首先,統計對放通道遠端非雜波區的噪聲基底平均值DN,一般取遠端16個距離采樣單元回波進行平均。
然后,測量對放通道輸入回波與輸出回波的對應關系。在接收機對放通道前端灌入連續波信號,調整輸入信號強度,測量輸出信號變化。假定輸出信號增加1個量化刻度,輸入信號強度增加X。
雷達系統開機,進行雜波測量,若對放通道在距離R處雜波回波幅度為Sout,則接收機輸入端的雜噪比CNR為

通過式(1)計算出距離R處輸入基本動態范圍
距離R處考慮陣地雜波輸入動態范圍為

若雷達的輸出動態范圍為Dout,則距離R處的動態STC值為

假定動態STC最小量化單位為1 dB,若DRSTC大于0 dB,則按STC的最小量化單位量化取大,動態STC測量值4.5 dB,則量化為5.0 dB;若DRSTC小于等于0 dB,動態STC值設為0 dB。
采用對放通道測量動態STC,天線旋轉一圈即可完成測量。
3.2 分布加集中式接收機動態STC建立方法
分布加集中式接收機示意圖如圖5所示,天線陣面包含m個天線子陣,每個子陣由n個天線單元組成,每個天線單元連接1個單元接收機。
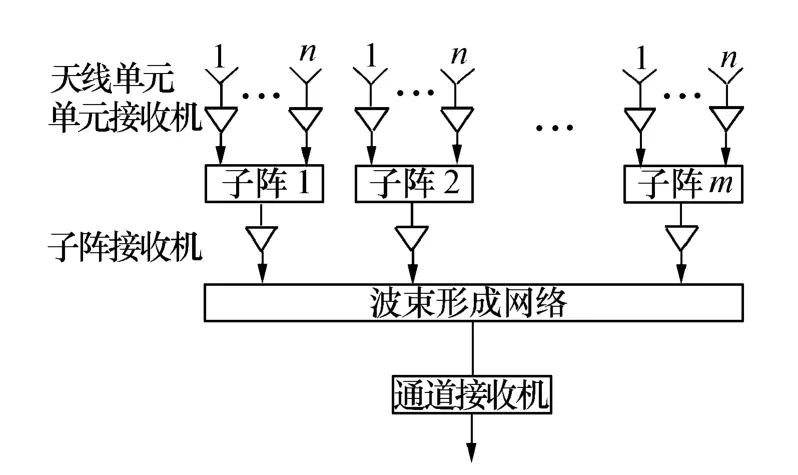
圖5 分布加集中式接收機示意圖
通道接收機最大輸入動態范圍Din見式(1)。子陣接收機的最大輸入動態范圍DSA[3]為

單元接收機最大輸入動態范圍DAL[3]為

單元和子陣接收機輸入動態范圍相對通道接收機已減小很多。因此,對于分布加集中式接收機,一般單元級進行RF回波的LNA放大,不設置射頻數字衰減器;子陣級進行RF回波二次放大,設置0.5DRFSTC射頻衰減;波束形成后在通道接收機進行RF回波放大和下變頻,設置0.5DRFSTC射頻衰減和全部的DIFSTC中頻衰減。對此類接收機可在通道接收機設置一路對數放大接收通道用于動態STC的測量。
距離R處動態STC值DRSTC的測量方法如下:
在陣面前方對雷達發射連續波信號,調整輸入信號強度,測量輸出信號變化。假定輸出信號增加1個量化刻度,輸入信號強度增加X。
其他步驟同集中接收機動態STC建立方法,即可完成對雷達動態STC的測量。
4 數字陣列雷達動態STC建立方法
數字陣列雷達包括子陣數字化和單元數字化雷達。子陣數字化雷達在子陣接收機進行接收信號的數字化,完成數字波束形成,接收機系統框圖如圖6所示;單元數字化雷達在單元接收機進行接收信號的數字化,完成數字波束形成,接收機系統框圖如圖7所示。
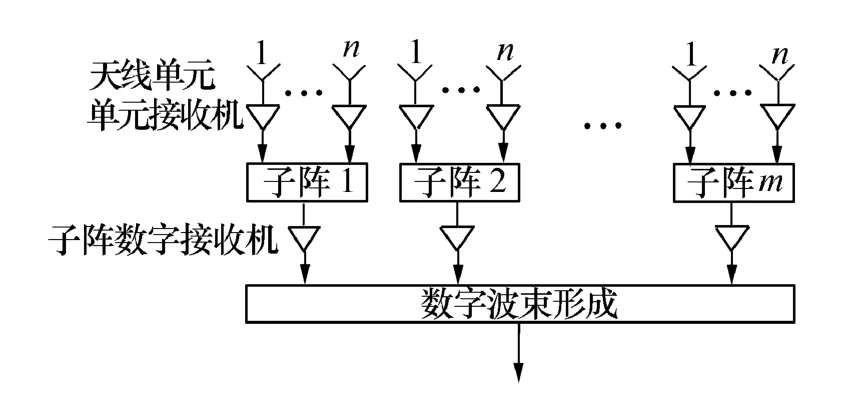
圖6 子陣數字化雷達接收機系統示意圖

圖7 單元數字化雷達接收機系統示意圖
對于子陣數字化雷達,單元接收機一般不設置射頻衰減器,所有射頻和中頻衰減器放置在子陣接收機。按式(1)、式(2)、式(3)、式(10)建立子陣數字化雷達的理論靜態STC圖。
對于單元數字化雷達,按式(1)、式(2)、式(3)、式(11)計算單元數字化雷達的理論靜態STC圖。
不論單元或子陣數字化雷達,不可能在每個單元或子陣設置對放通道進行動態STC的測量。單元或子陣數字化雷達距離R處的動態STC值DRSTC的測量方法如下:
假設STC最小量化刻度為1 dB,接收機輸出端最大幅度為Amax。
首先,對接收機全程設置最大的STC衰減STCmax,距離R處的回波為ARSTCmax。若Amax/ARSTCmax≤1 dB,則距離R處的STC值設為STCmax;若Amax/ARSTCmax>1 dB,不進行處理。
然后,接收機全程設置STC衰減值為STCmax-1,距離R處的回波為ARSTCmax-1。若0<Amax/ARSTCmax-1≤1 dB,則距離R處的STC值設為STCmax-1;假如Amax/ARSTCmax-1>1 dB,不進行處理。
同理,順序對接收機全程設置STC衰減值為STCmax-n,距離R處的回波為 ARSTCmax-n。若0<Amax/ARSTCmax-n≤1 dB,則距離 R處的STC值設為STCmaxn;假如 Amax/ARSTCmax-n>1 dB,不進行處理。
直至接收機全程設置STC衰減值為1 dB,距離R處的回波為ARSTC1。若0<Amax/ARSTC1≤1 dB,則距離R處的STC值設為1 dB;假如Amax/ARSTC1>1 dB,則距離R處的STC值設為0 dB。
按上述步驟即可建立與陣地雜波相關的動態STC圖。
最后,把建立的動態STC圖和理論靜態STC圖進行比較,對于每個距離、方位、仰角單元的STC值按取大處理即可得到最終的動態STC圖。
同理,對于模擬陣雷達也可采用上述方法建立動態STC圖,但測量時間較長,對于作戰反應時間短的高機動雷達不太適用。
5 結束語
雜波抑制一直是雷達系統設計的重點和難點,隨著雷達自動化、智能化要求越來越高,比較有效的措施是首先進行陣地雜波測量,建立動態STC防止接收機通道飽和,同時在信號處理或數據處理采用剩余雜波圖[4]進行雜波的濾除。
[1] Skolnik M I.Radar handbook[M].2nd ed.New York:McGraw-Hill,1990.
[2] 丁鷺飛,耿富錄,陳建春.雷達原理[M].北京:電子工業出版社,2009.Ding Lufei,Geng Fulu,Chen Jianchun.Radar principle[M].Beijing:Publishing House of Electronics Industry,2009.
[3] 張光義.相控陣雷達技術[M].北京:電子工業出版社,2006.Zhang Guangyi.Phased array radar technology[M].Beijing:Publishing House of Electronics Industry,2006.
[4] 馬曉巖,向家彬.雷達信號處理[M].長沙:湖南科學技術出版社,1999.Ma Xiaoyan,Xiang Jiabin.Radar signal processing[M].Changsha:Hunan Science & Technology Press,1999.
猜你喜歡
少先隊活動(2021年4期)2021-07-23 01:46:22
水上消防(2020年5期)2020-12-14 07:16:18
中國畢業后醫學教育(2020年5期)2020-12-06 06:52:46
鐵道通信信號(2019年7期)2019-10-08 08:38:02
攝影之友(影像視覺)(2019年3期)2019-03-30 01:36:50
鐵道通信信號(2018年1期)2018-06-06 02:27:38
玩具世界(2017年9期)2017-11-24 05:17:29
作文評點報·低幼版(2017年42期)2017-11-16 22:12:34
沈陽醫學院學報(2015年1期)2015-12-27 13:44:40
醫學教育管理(2015年3期)2015-12-01 06:43:16