基于Matlab 的水田激光平地機系統模擬仿真
2014-01-03 06:36:40陳君梅
電子測試 2014年8期
葉 娟,陳君梅*
(廣東科學技術職業學院廣州學院,廣東廣州,510640)
0 引言
我國是農業大國,發展農業規模化和精細化生產離不開土地平整技術。農田表面平整狀況對地面灌溉質量和效率有著重要影響, 應用激光控制平地技術進行農田土地平整, 可以有效改善農田表面狀況, 提高農田灌溉水的利用率, 實現精細地面灌溉。世界范圍內的大量研究表明,土地被平整后可提高莊稼產量20 ~30%,可節水30 ~50%,水田土地利用率提高9%,并可減少農藥、化肥和除草劑的使用量。激光平地技術是現有的最先進、最有效的土地精平技術,是農業生產中一項重要的節本增效措施,應用前景開闊,對農業機械化建設具有重要意義。
通過對水田激光平地機平地鏟工作原理的分析和數學推算,建立水田激光平地機平地鏟液壓伺服系統(電磁閥)傳遞函數模型。
水平平地鏟工作示意圖如圖1 所示,經過初步推算,建立平地鏟傳遞函數模型為

擬對該模型使用Matlab 進行機械、液壓、電控系統仿真,以求達到理想控制效果。

圖1 平地鏟工作示意圖
1 系統模擬概述
系統模擬(亦稱系統仿真)是指通過建立和運行系統的數學模型,來模仿實際系統的運行狀態及其隨時間變化的規律,以實現在計算機上進行試驗的全過程。這是近年發展起來的一門新興技術學科。實際對象通常是復雜系統,難以通過真實的實驗來進行分析、研究。因此,系統模擬技術就成為十分重要甚至必不可少的工具。本文中介紹的水田激光平地機,有高程控制系統而且擁有獨立的水平控制系統,能較好地保持平地鏟水平,具有良好的平地效果,能滿足更廣泛、更實際的水田地形條件。但水田激光平地機功率大機身重,易受干擾而出現誤操作,在田埂轉彎處水平難以控制。現場實踐操作工作不協調,相互干涉,工作效率偏低。我們采用系統模擬通過對水田激光平地機模擬運行過程的觀察和統計,得到被模擬系統的模擬輸出參數和基本特性,以此來估計和推斷實際系統的真實參數和真實性能,為真實系統問題的決策提供科學依據。
系統模擬作為系統研究和實踐中的一個重要技術手段,在求解水田激光平地機傳遞函數模型等復雜的系統問題中,具有下列幾個特點:
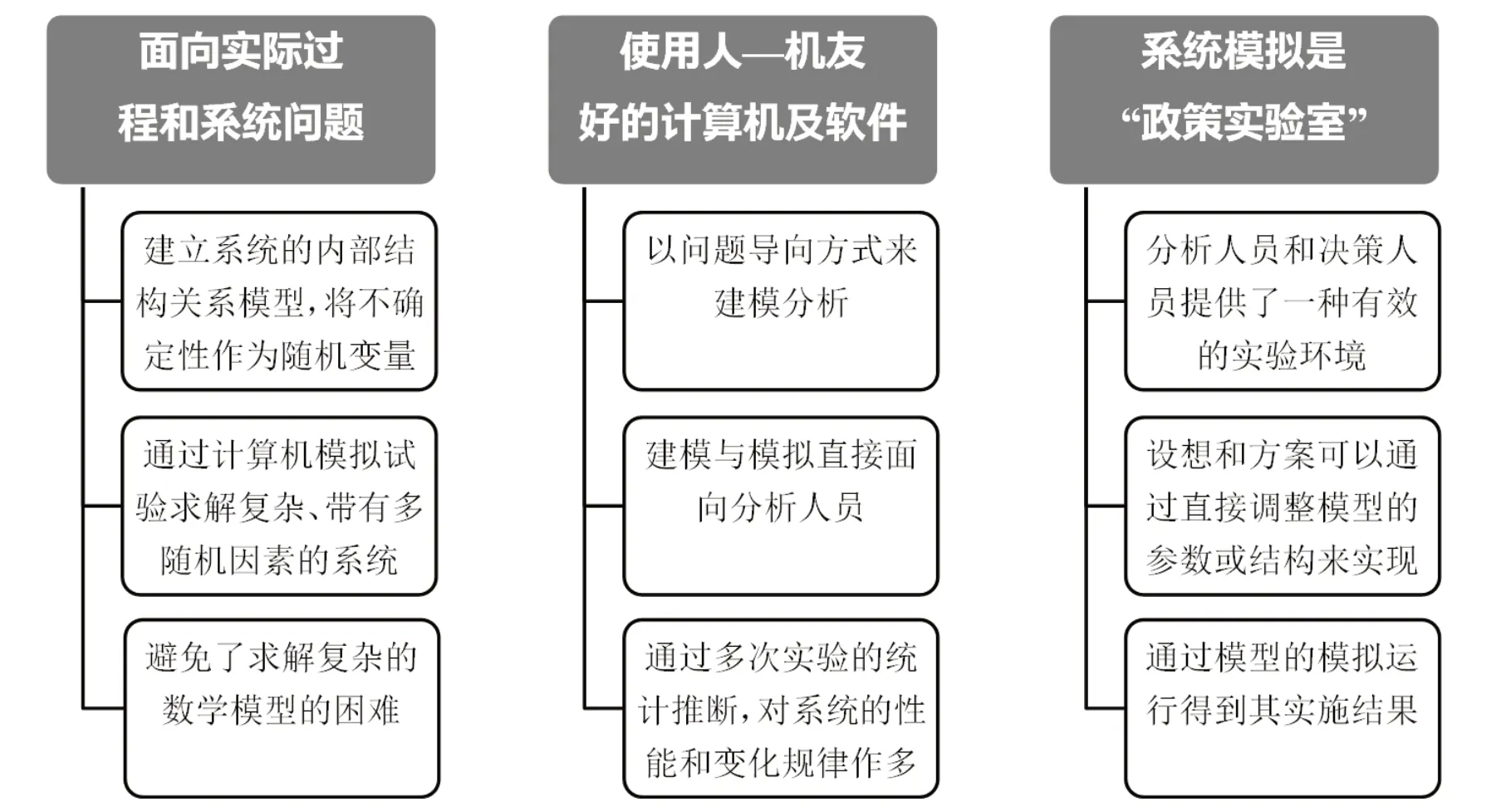
圖2 系統模擬的特點
2 激光平地機系統模擬分析
激光平地機工作時,激光發射器發出旋轉光束,在工作地塊的定位高度上形成一片光平面,此光平面就是憑證地的基準平面。激光接收器安裝在靠近刮土鏟鏟刃的固定桿上,從激光束到鏟刃之間的這段固定距離,即為標高定位測量基準。當接收器檢測到激光信號后,不停的向控制箱發送電信號,控制箱接收到標高變化的信號后,進行自動修正,修正后的電信號控制液壓控制閥,以改變液壓油輸向油缸的流向與流量,自動控制刮土鏟的高度,使之保持定位的標高平面,即可完成高精度的土地平整作業。
激光不但發射頻率大而且傳輸速度也快,因此在實驗過程中,直接針對單個激光粒子或激光脈沖直接進行分析研究可行性較低,該仿真系統以可視化的激光傳輸過程、機械、液壓系統的動態管理和電控系統的虛擬訓練為對象。通過模擬,實現位置偏差信號識別,可實時控制平地鏟的移動方向與幅度,完成一體化仿真。操作人員全面把握試驗過程中各元器件的安全狀態,并檢驗裝置的合理性等,通過計算軟件Matlab 的處理,記錄、對比實驗數據,獲得一個完整全面的分析結果,不斷改進和完善水平控制系統,直至達到最優控制效果。因此,激光平地機系統模擬應具備以下功能:

圖3 系統模擬的功能
3 編程方法實現
MATLAB 是由美國mathworks 公司開發的高科技計算環境,具有數值分析、矩陣計算、科學數據可視化、非線性動態系統的建模和仿真等強大功能。以高性能的數組運算(包括矩陣運算)為基礎,不僅實現了大多數數學算法的高效運行函數和數據可視化,而且提供了非常高效的計算機高級編程語言。在激光平地機的仿真系統中,通過分析和數學推算,建立電磁閥傳遞函數模型,以Matlab 實現仿真數據的后處理,建立了粒子系統進行管理,再對激光光束傳輸的可視化建模、傳遞函數模型計算機三維仿真驗證。
激光感應系統的靈敏度較人工肉眼判斷和拖拉機上操作人員的手動液壓系統準確10 ~15 倍,采用水平控制算法,使水平控制精度提高20%以上,加入控制參數自適應和自診斷功能,實現水平控制與高程控制協同工作。仿真流程為:
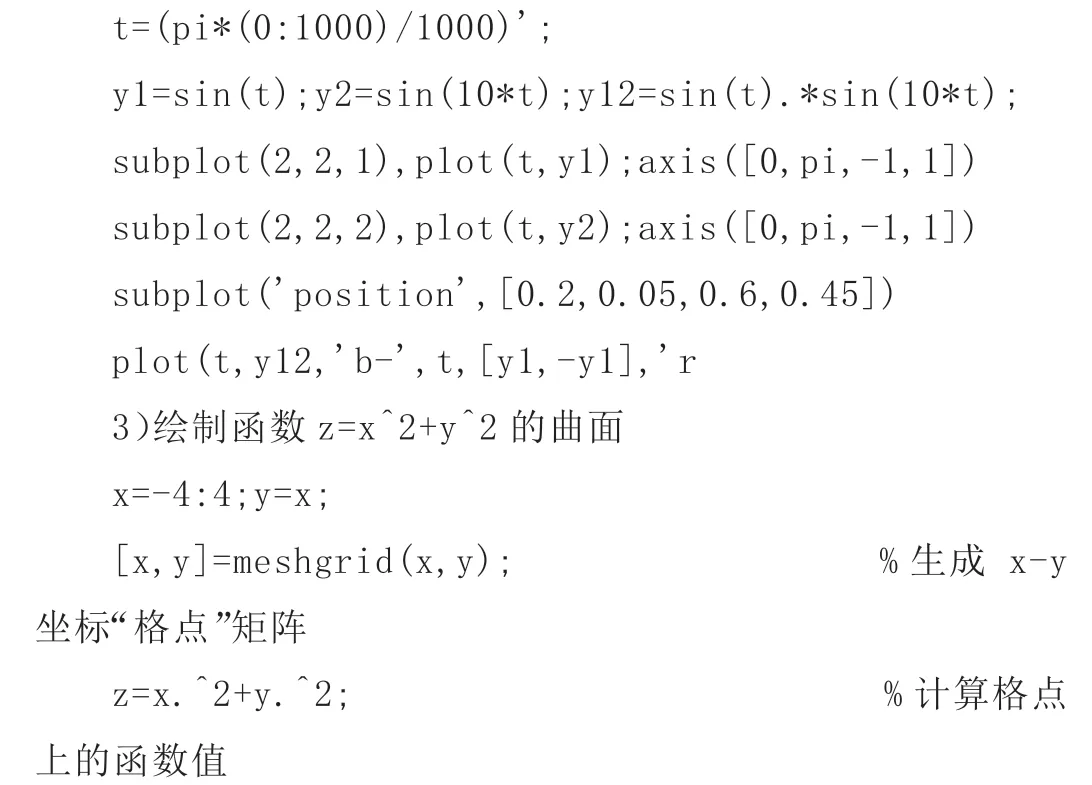
南方水田硬底層高低不平,水田激光平地機利用MATLAB軟件完成編程如下:
1)假設x,y,z 組成一組曲線的坐標參數,當x,y,z 是同維向量時,則x,y,z 對應元素構成一條三維曲線。當x,y,z 是同維矩陣時,則以x,y,z 對應列元素繪制三維曲線,曲線條數等于矩陣列數。

2)MATLAB 具有極其強大的數據可視化功能,可制作激光平地機具有出版質量圖形,在同一圖形窗口布置幾幅獨立的子圖,產生的子圖彼此獨立。

4 結論
在水田激光平地機中應用Matlab 軟件實現系統模擬仿真,有助于我們實現高效的開發、調試,耗時短,耗資小,耗材少,通過仿真校驗分析,不斷地修訂算法和函數模型,做到了直觀顯示與復雜計算的統一,以獲取最佳狀態和最精準參數,實現控制效果最優化。

圖4 系統仿真流程
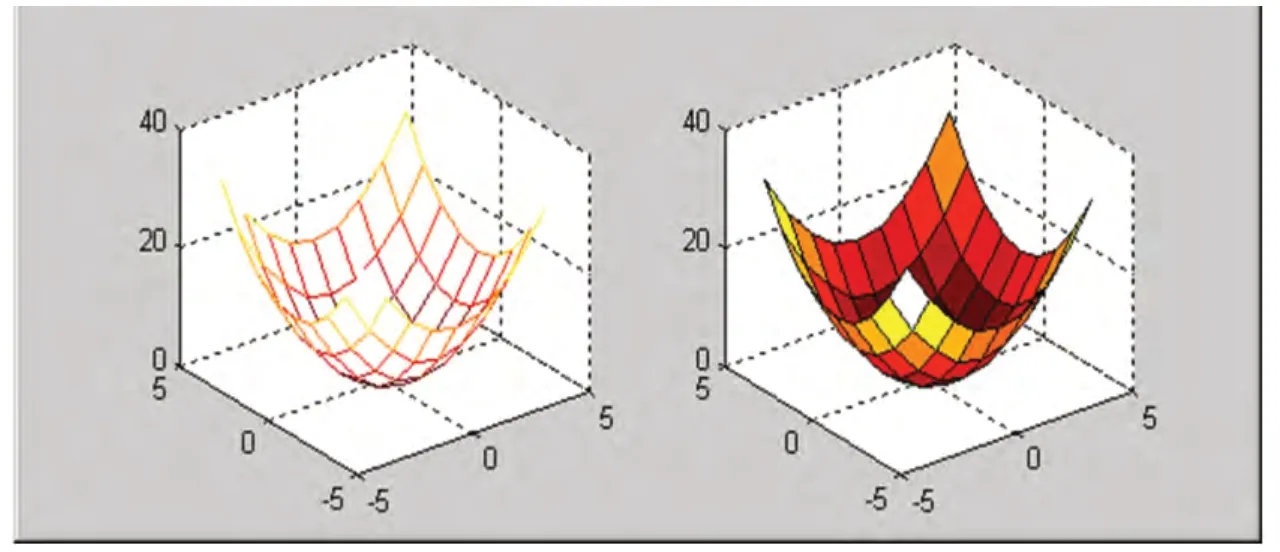
圖5 曲面的繪制結果
[1] 姚亞萍.激光控制平地系統的研究與設計[D].西北農林科技大學2010 屆攻讀碩士學位研究生學位論文,2010.
[2] 黎永鍵,趙祚喜.水田激光平地機平地鏟姿態測量系統的設計[J].農機化研究,2012,(2):69-74
[3] 葛建兵,倪向東,李盛林,曹杰.Multisim 在激光控制平地機控制器設計中的應用[J].中國科技博覽,2009,(7):30.
[4] 夏文俊,王峻峰,李世其.基于虛擬樣機的激光傳輸模擬仿真系統開發[J].系統仿真學報,2007,(14):3237-3240
[5] Rickman J F.Manual for laser land leveling[R]. Rice-Wheat Consortium Technical Bulletin Series 5,2002.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
北京測繪(2022年6期)2022-08-01 09:19:06
師道·教研(2022年1期)2022-03-12 05:46:47
云南化工(2021年8期)2021-12-21 06:37:54
北京測繪(2021年7期)2021-07-28 07:01:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
裝備制造技術(2019年12期)2019-12-25 03:06:46
傳媒評論(2019年4期)2019-07-13 05:49:14
