基于Matlab/Simulink的交流異步電機矢量控制系統
2014-01-15 09:59:42張文哲
電子設計工程 2014年15期
張文哲
(1.上海理工大學 上海 200093;2.德國科堡應用科技大學 巴伐利亞州 科堡 96450)
隨著科技的發展,工業生產中對電機控制系統的性能要求不斷變高。因此,建立性能優越的交流異步電機控制系統的模型成為電機研究領域急需解決的一個關鍵問題。文中利用Matlab/Simulink的強大建模仿真功能,提出了一種電機的矢量控制方法以及建立了模型并進行仿真[1]。
1 交流異步電機數學模型的建立
1.1 矢量控制系統中的坐標變換
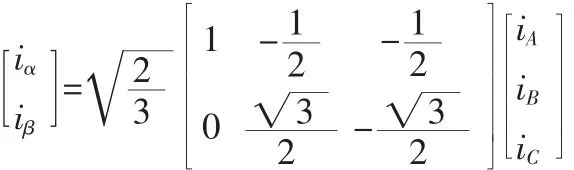
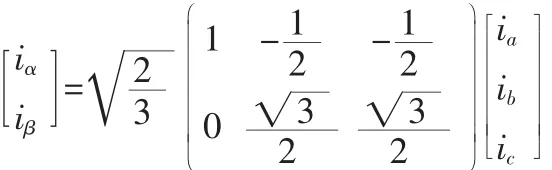
三相電流 iA、iB、iC和兩相垂直的電流 iα、iβ通過異步電機的定子部分,這兩種電流之間存在著矢量變換關系。在三相定子坐標系下,電機的定子電流iA、iB、iC可以經過3/2坐標變換等效成兩相靜止坐標系下的交流電流iα、iβ。然后通過轉子的旋轉變換(根據轉子磁場定向原理),即等效成直流電流id、iq(同步旋轉坐標系情況下)[2]。
變換矩陣(3/2變換)為:
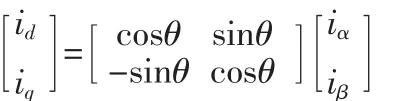
從α、β系(兩相靜止坐標系)變換到d、q系(兩相旋轉坐標系)的變換矩陣為如下公式:
1.2 交流異步電機的數學模型
在矢量控制過程中交流異步電機的物理模型如圖1所示。其中電機的定子三相繞組軸線A、B、C是固定在電機內部的,把A軸作為一個參考坐標軸,則轉子繞組a、b、c隨著轉子進行旋轉,θ為空間角位移變量[3]。
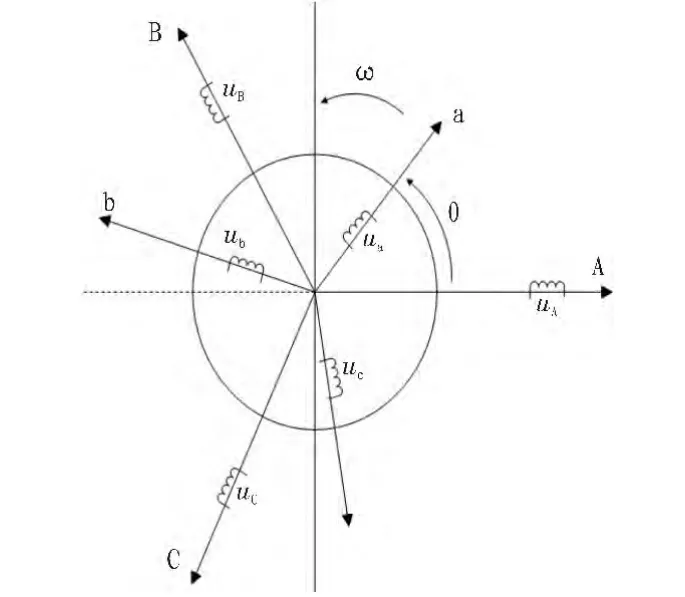
圖1 交流異步電機物理模型Fig.1 Physical model of AC asynchronous motor
2 交流異步電機矢量控制原理
2.1 矢量控制的控制思路
在設計過程中模擬直流電機的控制手段,計算得到直流電機的控制量,然后經過對應的坐標反變換,那么利用這樣的過程就能夠簡單的控制交流異步電機了。這樣的過程是根據交流異步電機經相應的坐標變換可等效為直流電機的原理而來的。因此通過此類的坐標變換而實現的控制系統就稱為矢量控制變換系統,亦或簡稱為矢量控制系統[4]。
2.2 矢量控制的坐標轉換
三相靜止坐標轉化為兩相靜止坐標(3s/2s變換)公式為:
兩相靜止坐標轉化為兩相旋轉坐標(即2s/2r變換)公式為:
2.3 矢量控制的原理及實現方法
圖2為交流異步電機的變頻矢量控制系統框圖,這個系統是采用轉差頻率矢量控制方式的。首先計算出轉矩的電流給定值,由磁通給定值計算出勵磁電流給定值其中ψ2和ωs是由電動機的實際電流經對應的坐標變換得到,通過電流模型法計算出d、q軸的電流id、iq。對給定電流值、進行相應的坐標反變換,即可得到定子三相電流指定值iA,iB,iC。 最后,由 ACR 的輸出去控制 IGBT,即:ACR 的輸出信號為IGBT的控制信號。而ACR的輸出是由檢測得到的三相電流實際值跟給定電流值比較產生的偏差而決定的[5]。
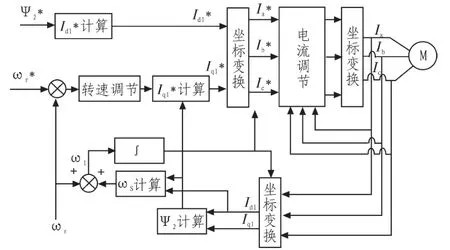
圖2 主電路圖Fig.2 Main circuit diagram
3 交流異步電機矢量控制系統的建模及仿真
3.1 系統主電路圖
圖3為電機矢量控制系統的電路主要部分。Constant speed為速度給定模塊。設置原始角速度為120rad/s。Speed Controller是PI控制器,也可稱作是速度控制器。它的輸出轉矩信號傳給iqs*calculation模塊。dq to abc conversion模塊的主要功能是通過給定的定子d和q坐標電流分量,結合Teta calculation模塊可計算出θ角,把定子dq兩相電流坐標轉化為abc三相電流坐標。ABC to abc conversion模塊的作用是把定子dq坐標電流轉化成定子abc坐標電流,再將此定子abc坐標電流輸入ACR電流調節器,與電機實際的反饋電流產生一個比較,用比較的輸出信號來控制IGBT的導通與關斷,從而可以對電機轉速形成控制。
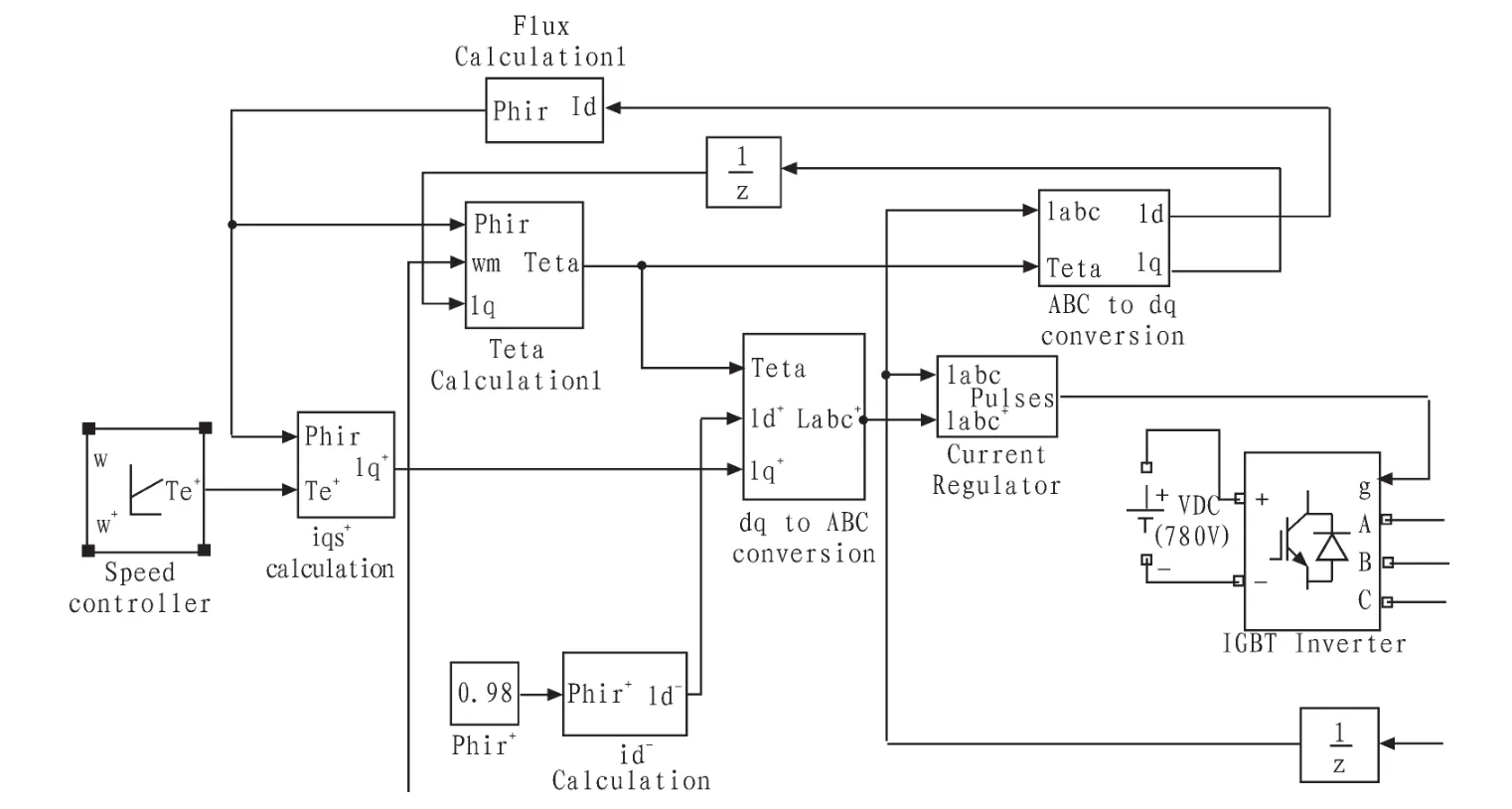
圖3 電路主要部分Fig.3 Main part of circuit
3.2 Matlab仿真實驗結果及分析
1)電機空載運行試驗
從圖4空載運行的曲線可以看電機剛啟動的時候,定子電流可以達到450 A的極限值。電機恒轉矩啟動階段,定子電流一般維持在100 A左右,恒轉矩啟動階段的啟動時間大致為0.7 s。在恒轉矩運行段,轉矩始終保持在最大值300N×M左右。
2)轉速輸出波形(轉速為 100 r/min,P=1,I=10,負載為 0)
波形穩定值為99.8 r/min,5%的響應時間為9.04 s
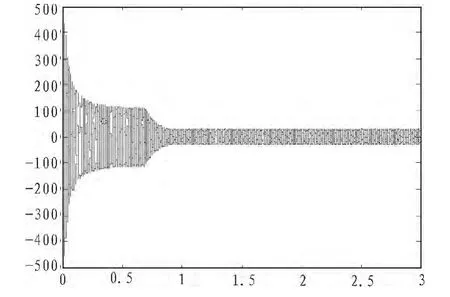
圖4 空載時的定子三相電流Fig.4 Three phase current of the stator when no-load
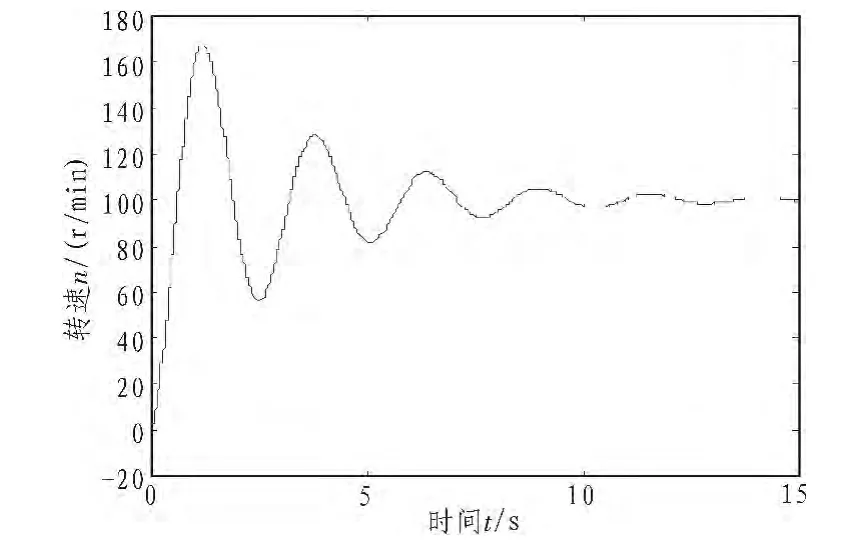
圖5 轉速設為100 r/min轉速曲線Fig.5 Rotate curve when set 100 r/min
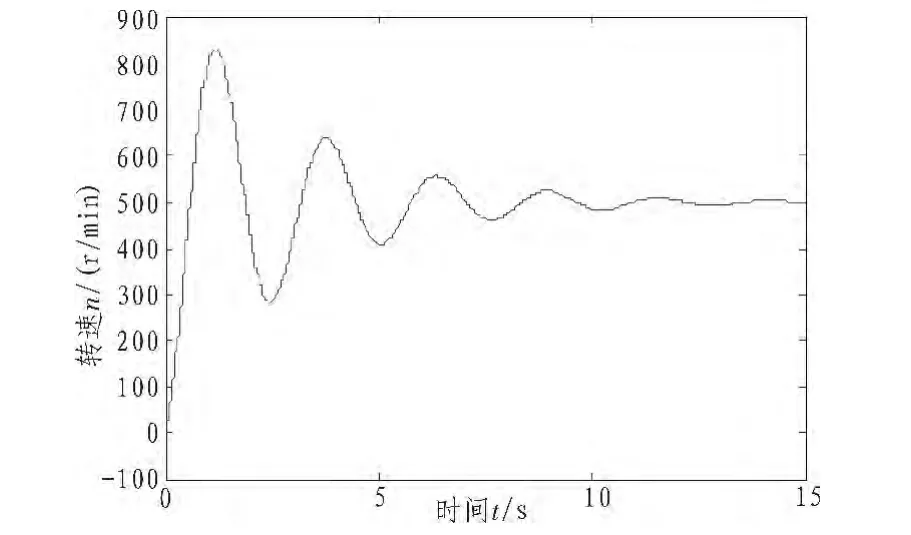
圖6 轉速設為500 r/min轉速曲線Fig.6 Rotate curve when set 500 r/min

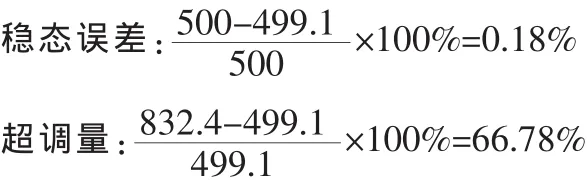
3)轉速輸出波形(轉速為 500 r/min,P=1,I=10,負載為 0)
波形穩定值為499.1 r/min,5%的響應時間為8.03 s
4)轉速輸出波形(轉速為 1 000 r/min,P=1,I=10,負載為 0)
波形穩定值為998.9 r/min,5%的響應時間為8.01 s
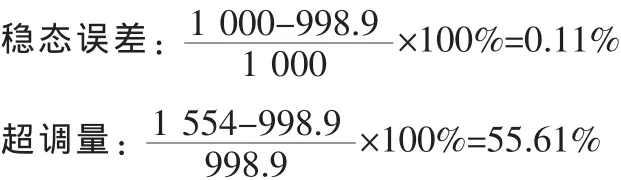

圖7 轉速設為1000r/min轉速曲線Fig.7 Rotate curve when set 1000r/min
4 結束語
通過此次模型的設計以及仿真,可以看出MATLAB比較適合電機控制領域內的仿真及研究。Matlab/Simulink在研究某些問題的時候,操作起來十分方便,也極大的提高了效率。通過大量的仿真試驗得到的仿真結果曲線,充分證明了在交流異步電機矢量變換模型的基礎上來建立模型的正確性可靠性。采用SIMULINK庫來對交流異步電機的調速系統進行仿真,不需要編程。具有簡單、精確等優點。在研究電機調速系統的領域中具有重要的影響和意義。
[1]王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2009.
[2]林琳,陳剛.異步電動機矢量模型的Matlab軟件仿真及其應用[J].微特電機,2008(1):31-34.LIN Lin,CHEN Gang.Asynchronous motor vector model simulation of Matlab software and its application[J].Small&Special Electrical Machines,2008(1):31-34.
[3]張倩,張榮文.基于Simulink的異步電機矢量控制系統建模與仿真[J].機械工程與自動化,2008(5):3-7.ZHANG Qian,ZHANG Rong-wen.Modeling and simulation of induction motor vector control system based on simulink[J].Mechanical Engineering&Automation,2008(5):3-7.
[4]徐飛.基于MATLAB的異步電機矢量控制系統仿真[J].信息技術與信息化, 2008(6):70-72.XU Fei.Simulation of induction motor vector control system based on simulink[J].Information Technology and Information,2008(6):70-72.
[5]張興華.基于Simulink/PSB的異步電機變頻調系統建模與仿真[M].系統仿真學報,2005,17(9):2099-2103.ZHANG Xing-hua.Modeling and simulation for variablefrequency drives of asynchronous motors based Simulink/PSB[J].Journal of System Simulation,2005,17(9):2099-2103.
[6]周淵深.交直流調速系統是MATLAB仿真[M].北京:中國電力出版社,2004.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海峽姐妹(2020年8期)2020-08-25 09:30:18
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12
